ре 1ещения, а также систему управления отлич ающий ся тем, что, с целью повышения производительности за счет сокращения времени нacтpoйю захватного устройства на заданный размер объекта манипулирования, он снабжен жестким упором, установленным на колонне, а механизм перемещения .губ ок выполнен в виде ведомьп; зубчатых колес, каждое из которых жестко связано с губками, ведущего зубчатого колеса, жестко установленного на входчи, а червячное колесо жестко связано с ведущим колесом косозубой зубчатой передачи и установлено в корпусе захватного устройства, при этом
ведомое зубчатое колесо установлено на входном валу механима перемещения губок соосно с ведущим прямозубым колесом, подвижно в осевом направлении и подпрузшненно относительно него дополнительно введенным упругим элементом, а жесткий упор взаимосвязан с зубчатыми рейками.
Buff в
Фиг. г
ФиеЛ
п
75-Г.з
Г-Г
фиг. 5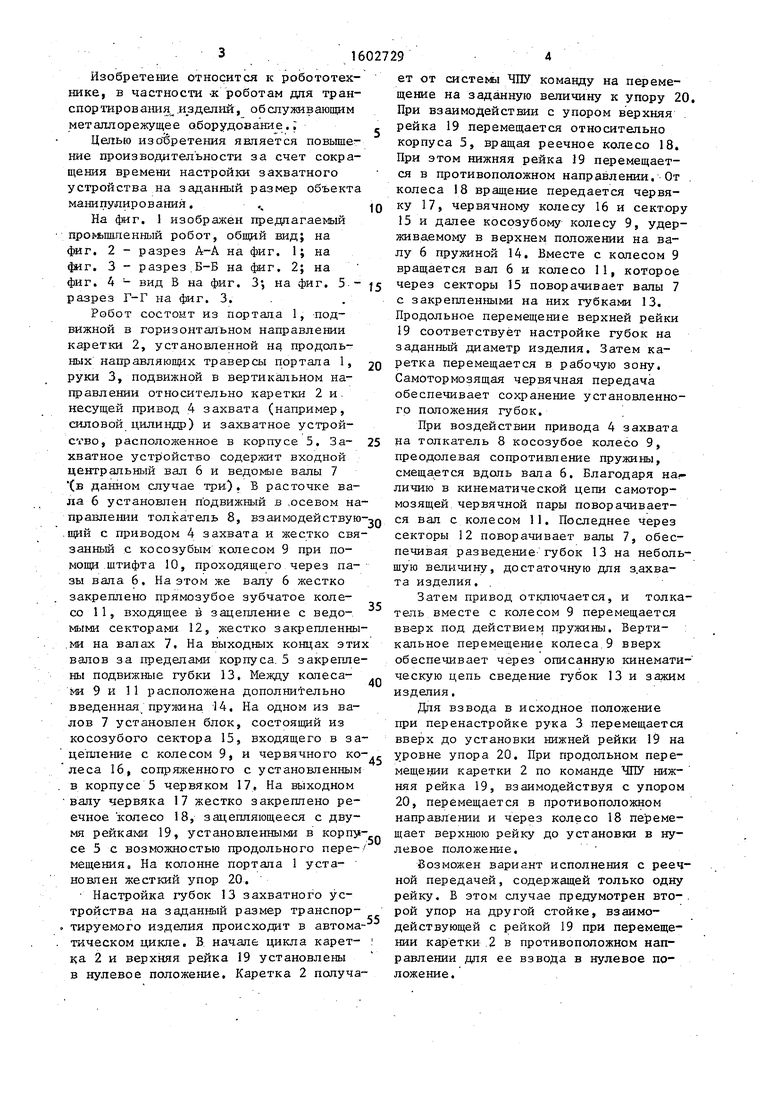
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Захват | 1981 |
|
SU971646A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Захватное устройство манипулятора | 2018 |
|
RU2700348C1 |
| Зубодолбежный станок | 1987 |
|
SU1569118A1 |
| Захватное устройство | 1986 |
|
SU1323371A1 |
| Универсальное захватное устройство | 1989 |
|
SU1641610A1 |
| Схват | 1983 |
|
SU1079429A1 |


Изобретение относится к робототехнике, в частности к роботам для транспортирования изделий, обслуживающим металлорежущее оборудование. Целью изобретения является повышение производительности за счет сокращения времени настройки захватного устройства на заданный размер объекта манипулирования. При вращении червячного колеса 16 от червяка, приводимого во вращение от зубчатой реечной передачи, осуществляется поворот косозубого ведомого колеса 9 и вместе с ним ведущего прямозубого колеса 11. При вращении последнего губки захватного устройства раздвигаются на заданную величину, определяемую габаритами детали. При воздействии привода на толкатель 8 возникает осевое перемещение колеса 9 по валу 6. При этом наклон зубьев колес 9 и 15, а также самоторможение червячной передачи определяет поворот губок захватного устройства на величину, обеспечивающую фиксацию и транспортировку детали. 5 ил.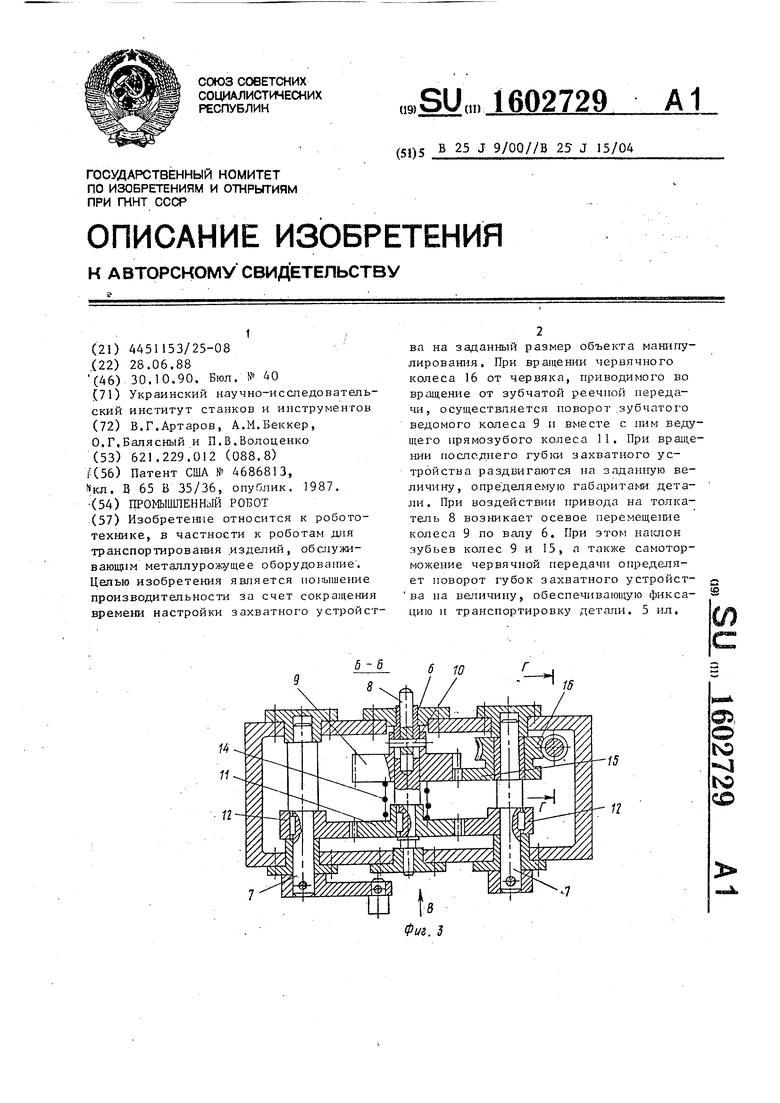
| Патент США № 4686813, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
