Изобретение относится к робототехнике и может быть применено при механизации и автоматизации технологических процессов.
Цель изобретения - упрощение конст- рукции захвата и обеспечение возможности использования нереверсивного привода.
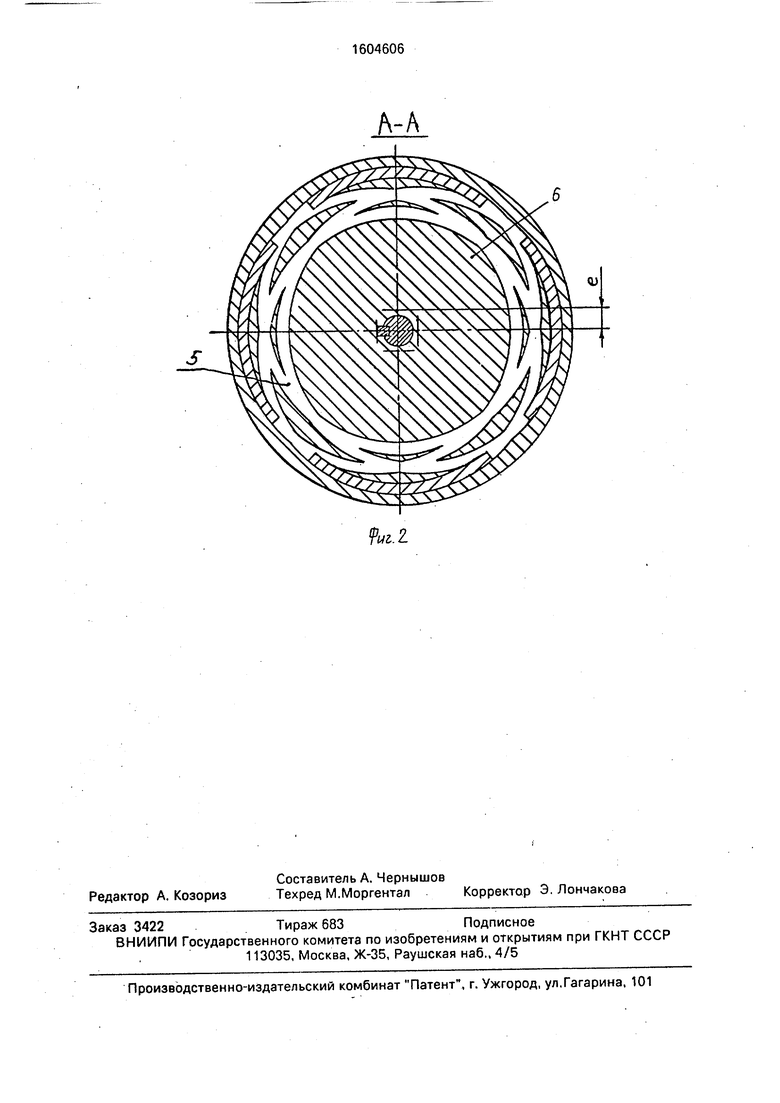
На фиг,1 изображен захват, продольный разрез; на фиг.2 - сечение А-А на фиг. 1.
Захват промышленного робота содер- жит корпус 1, в направляющих которого установлены радиально перемещающиеся зажимные губки 2, которые связаны с нереверсивным приводом 3, например электродвигателем, с помощью шарнирно закрепленных на них криволинейных ползунов 4, взаимодействующих с эксцентрическими кольцевыми канавками 5, выполненными на поверхности диска 6, кинематически связанного с приводом 3, при- чем число канавок равно количеству зажимных губок.
Датчики, установленные на корпусе 1 (не показаны), взаимодействуя с зажимной губкой 2, служат для определения момента отключения привода 3 при зажиме или разжиме захвата.
Эксцентрисистет е. с которым выполнены канавки 5, определяет величину радиального перемещения зажимных губок 2. Пазы 7, выполненные в зажимных губках , служат для регулировки начального положения губок (изменение размера В) при изменении размера захватывемых деталей.
Захват промышленного робота работа- ет следующим образом.
В исходном положении зажимные губки 2 максимально разведены, о чем сигнализирует датчик, привод 3 обесточен. При попадании детали в зону захвата система управления подает команду на ее зажатие. Привод 3 включается и поворачивает на пол-оборота диск 6, взаимодействующий
своими канавками 5 с криволинейными ползунами 4, которые закреплены на зажимных губках 2 шарнирно и имеют длину большую расстояния между точками пересечения соседних кольцевых канавок, что обеспечивает нахождение каждого криволинейного ползуна 4 только в одной своей кольцевой канавке при зажиме или разжиме захвата. Благодаря этому взаимодействию зажимные губки 2 получают радиальное перемещение, равное удвоенной величине эксцентрисистета е, и зажимают деталь. Момент зажима отмечается датчиком и двигатель 3 отключается. Для разжатия захвата подаётся команда на включение двигателя, при этом двигатель и диск 6 вращаются в ту же сторону, что и при зажиме, и освобождение детали осуществляется аналогично ее захвату.
Формула изобретения
1.Захват промышленного робота, содержащий корпус, привод, зажимные губки, выполненные с возможностью радиального перемещения, отличающийся тем, что, с целью упрощения конструкции захвата и обеспечения возможности применения нереверсивного привода, захват снабжен диском, установленным перпендикулярно продольной оси захвата, и кинематически Связан с приводом, а на поверхности диска выполнены эксцентрические кольцевые канавки, число которых равно числу губок, причем на губках шарнирно установлены дополнительно введенные криволинейные ползуны, каждый из которых имеет возможность расположения в соответствующей кольцевой канавке.
2.Захват по п. 1.отличающийся тем, что криволинейные ползуны имеют длину, превышающую расстояние между точками пересечения соседних кольцевых канавок.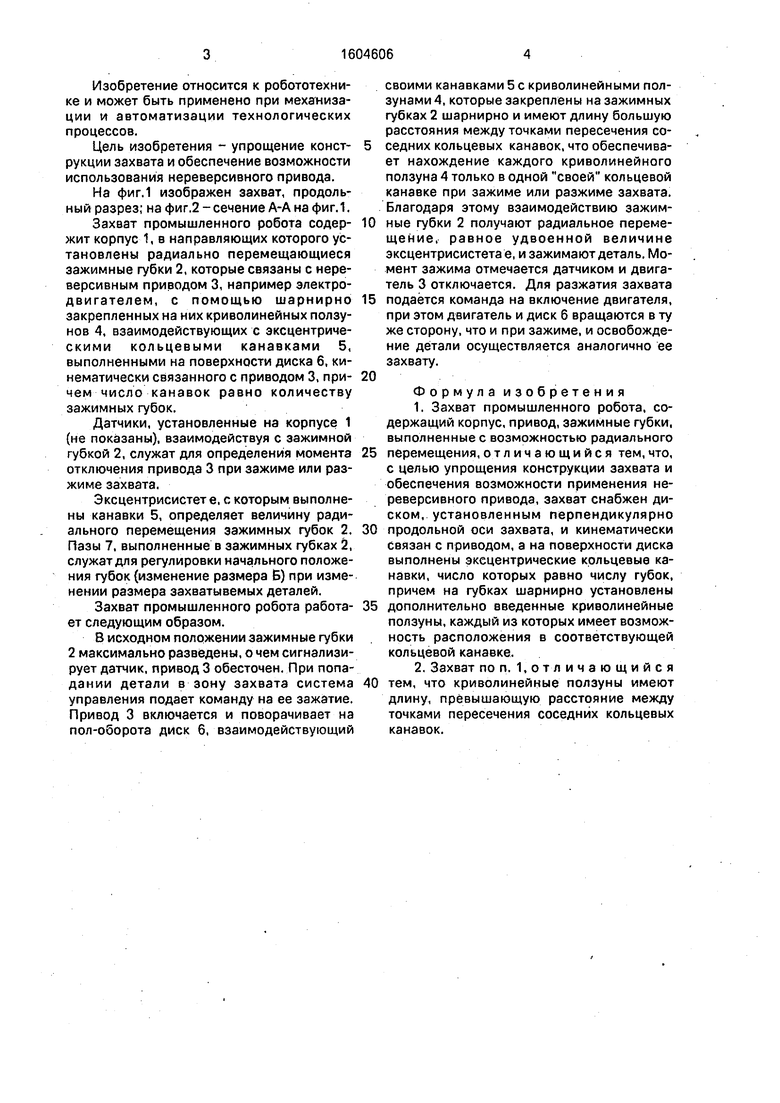
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство "новокомак | 1986 |
|
SU1360980A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| ЗАЖИМНОЕ УСТРОЙСТВО | 2003 |
|
RU2265500C2 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| Захват | 1986 |
|
SU1397280A1 |
Изобретение относится к робототехнике и может быть применено при механизации и автоматизации технологических процессов. Целью данного изобретения является упрощение конструкции и обеспечение возможности использования нереверсивного привода. Захват промышленного робота состоит из корпуса 1, в направляющих которого радиально перемещаются губки 2. На губках 2 шарнирно закреплены криволинейные ползуны 4, расположенные в кольцевых эксцентричных канавках 5 диска 6, кинематически связанного с приводом 3. Число эксцентричных кольцевых канавок 5 равно числу губок 2. Эксцентриситет, с которым выполнены кольцевые канавки 5, определяет величину радиального перемещения зажимных губок 2. В исходном положении губки 2 максимально разведены. При включении привода 3 диск 6 поворачивается на пол-оборота. Канавки 5 взаимодействуют с ползунами 4, на которых шарнирно закреплены губки 2. Губки 2 сходятся, и деталь зажимается. Для разжатия захвата диск 6 поворачивается приводом 3 в ту же сторону еще на пол-оборота. 1 з.п.ф-лы, 2 ил.
| ТУРБОДИСК | 2014 |
|
RU2572980C1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
