Изобретение относится к технологическому оборудованию и может быть ис- пользовано в маншностроении.
Пелью изобретения является расширение технологических возможностей.
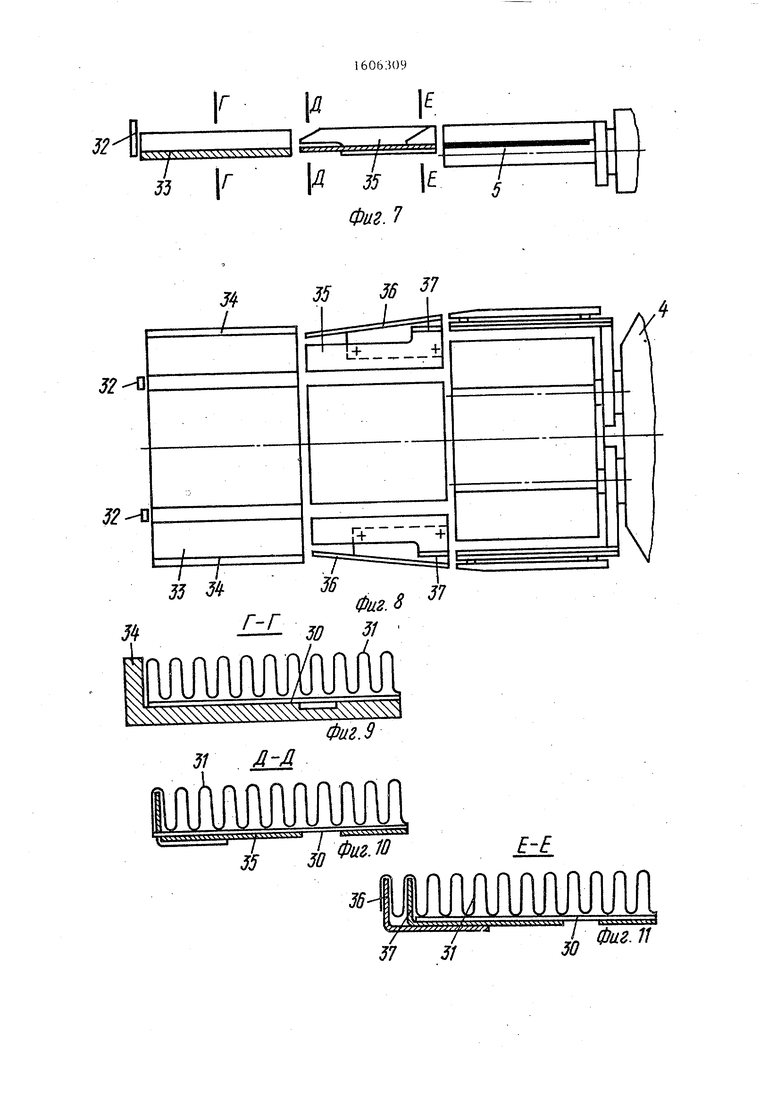
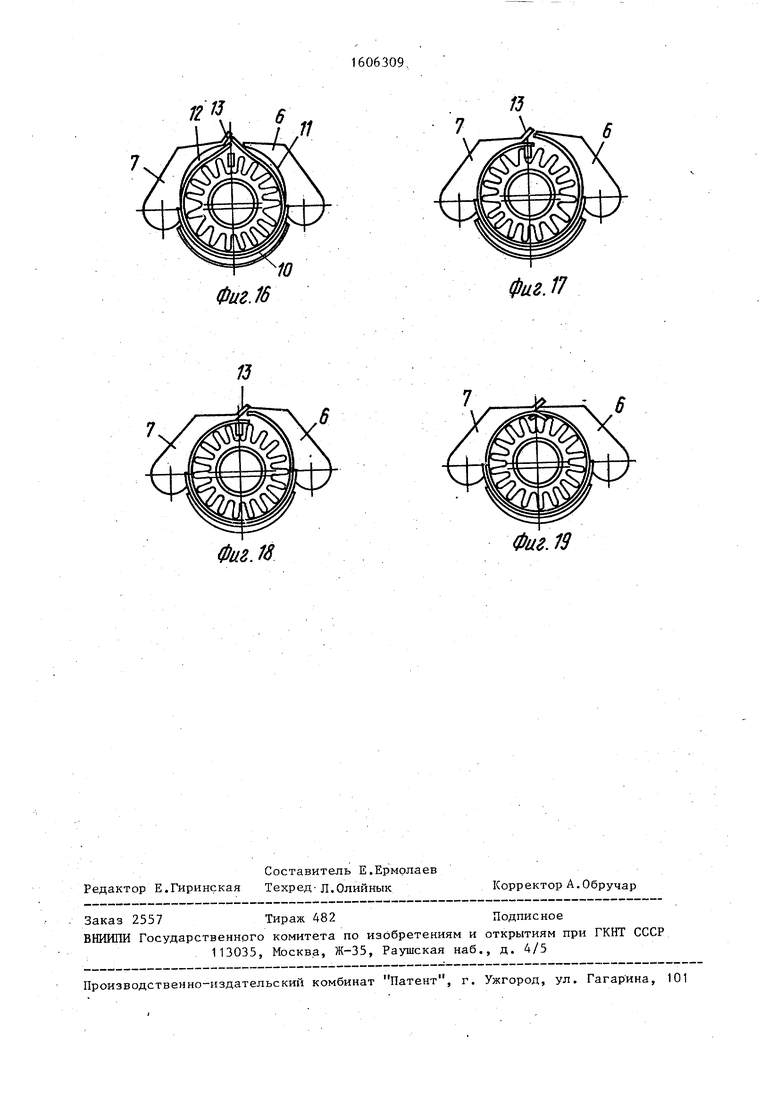
Существо изобретения поясняется .чертежами, где: фиг. 1 - общий вид автомата,.вид сбоку; фиг.2 - то же, вид сверху; фиг. 3 - сборочное устройство; фиг. 4 - разрез по А-А на фиг. 1; фиг. 5 - сечение }j-B на фиг. 4; фиг.6 - сечение В-В нафиг.4; фиг. 7 - позиция загрузки заготовок обечайки и шторки, вид сбоку; фиг.8 - то же, сверху; фиг. 9 - сечение по Г-Г на фиг. 7; фиг.10- сечение по Д-Д фиг. 7; фиг. 11 - сечение по Е-Е на фиг. 7; фиг. 12-19 - основные этапы сборки масляного фильтра.
Автомат для сборки (фиг. 1,2) содержит станину 1 с размещенными на ней окружными копирами 2, установленный на оси 3 поворотный барабан 4, на периферии которого размещены сборочные устройства 5, кинематически связанные с копирами 2, а также механизмы загрузки и выгрузки.
Каждое сборочное устройство 5 выполнено в виде установленных на двух параллельных осях с возможностью не- зависимого поворота одноплечих рычагов 6, 7 и захватов, выполненных в виде рычагов 8, 9. Рычаги 6, 7 скреплены между собой с помощью гибкого, например, кожаного элемента 10 и имеют радиусные ложементы соответственно П и 12, Рычаг 6 имеет заострена:
О О5
со
о со
ную кромку, а рычаг 7 - отогнутый конец 13. Захваты (рычаги) 8 н 9 снабжены на концах подпружиненными губками 14 и 15, каждая из которых имеет возможность взаимодействия с копирами соответственно 16, 17 и 18, 19. Копиры 16, 18 закреплены на барабане 4, а копиры 17, 19 выполнены на каретке 20, имеющей возможность перемещения от одного из копиров. Кинематическая связь рычагов 6, 7 с копирами 2 выполнена в виде толкателей 21, 22 и реечных передач 23, 24. Толкатели 21, 22 соединены между собой с помощью регулировочных винтов 25, 26 и подпружиненных стержней 27, 28. Захваты 8, 9 кинематически связаны с копирами 2 с помощью толка10
теля 29 и реечной передачи.
Механизм загрузки бумажной обечайки 30 и гофрированной щторки 31 вьшолнен в виде толкателя 32, плоского лотка 33 с параллельными стен-, ками 34, а также плоского лотка 35 с расходящимися стенками 36 и д опол- нительными параллельными выступами 37. Автомат работает следующим образом .
На позиции I уложенные- друг на друга заготовки шторки 31 и обечайки 30 подаются в механизм загрузки, где они с помощью толкателя.32 перемещаются вначале по лотку 33, а затем - по лотку 35 в сборочное устройство 5. При этом с помощью стенок 36 и выступов 37 от шторки 31 отделяются крайние гофры, которые располагаются в сборочном устройстве 5 между захватами 8, 9 и губками 14, 15 (фиг.12). После поворота барабана 4 на позиции II на шторку 31 подается металлическая трубка 38. В процессе поворота барабана 4 между позициями I и III толкатели 21, 22 и 29 получают пере- мещения от копиров 2. В результате этого при повороте захватов 8, 9 губки 14, 15 выходят из контакта с копи- рами 16, 18 и фиксируют крайние гофры шторки 31. Одновременно с захватами 8, 9 поворачиваются и рычаги 6, 7, в результате чего обечайка 30 и шторка 31 приобретают каплевидную форму (фиг.14). На позиции III крайние гофры шторки 31 скрепляются между собой с помощью скрепки 39, подаваемой . механизмом загрузки (не показан). При дальнейшем повороте барабана 4 каретка 20 получает перемещение вверх
1606309 .
и своими копирами 17, 19 отжимает губки 14, 15, освобождая шторку 31, которая опускается и равномерно охватывает металлическую трубку 38 (фиг.15). Далее захваты 8, 9 возвращаются в исходное положение, а рычаги 6, 7 осуществляют свертывание обечайки 30. Рычаг 6 первым заканчивает движение. Правая часть обечайки 30, получая движение от рычага 7, скользит по отогнутому концу 13 рычага 6 и замыкается со своей левой частью в тот момент, когда заостренная кромка рычага 7 оказывается под концом 13 рычага 6. Песинхронность движений толкателей 21 и 22 компенсируется за счет появления зазоров в-соединениях винт 25, 26 - стержень 27, 28 или стержень 27, 28 - толкатель 21, 22. К моменту прихода соответствующего - сборочного устройства на V позицию рычаги 6, 7 возвращаются толкателями 21, 22 в исходное положение и собранное изделие удаляется из автомата.
15
20
25
Формула изобретения
30
35
40
1. Автомат для сборки, содержащий станину с копирами, приводной барабан, на котором размещены рабочие позиции для собираемых деталей, сборочные устройства с приводами, имеющими толкатели, установленные с возможностью взаимодействия с упомянутыми копирами, а также механизмы загрузки и выгрузки деталей, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения сборки поду3лов фильтров, каждый из которых включает в себя обечайку и соосно .установленную в ней шторку, охваты- ззающую трубку, каждая рабочая позиция барабана снабжена рычагами для свертки обечайки, выполненными с ложементами и установленными с возможностью поворота от привода на осях, параллельных оси рабочей позиции, и захватом для свертки шторки, вьтолнен- ным в виде дополнительных рычагов с приводом их поворота, снабженных приводными зажимньми губками для крайних -гофров щторки, причем рычаги для свертки обечайки выполнены разной 55 длины и связаны между собой дополнительно введенным гибким элементом для приема и поддержки обечайки, при этом конец короткого рычага выполнен
45
50
Формула изобретения
0
5
0
1. Автомат для сборки, содержащий станину с копирами, приводной барабан, на котором размещены рабочие позиции для собираемых деталей, сборочные устройства с приводами, имеющими толкатели, установленные с возможностью взаимодействия с упомянутыми копирами, а также механизмы загрузки и выгрузки деталей, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения сборки поду3лов фильтров, каждый из которых включает в себя обечайку и соосно .установленную в ней шторку, охваты- ззающую трубку, каждая рабочая позиция барабана снабжена рычагами для свертки обечайки, выполненными с ложементами и установленными с возможностью поворота от привода на осях, параллельных оси рабочей позиции, и захватом для свертки шторки, вьтолнен- ным в виде дополнительных рычагов с приводом их поворота, снабженных приводными зажимньми губками для крайних -гофров щторки, причем рычаги для свертки обечайки выполнены разной 55 длины и связаны между собой дополнительно введенным гибким элементом для приема и поддержки обечайки, при этом конец короткого рычага выполнен
5
50
заостренным, а длинного - с направляющей поверхностью для за-прапки концон обечайки.
2.Автомат по п.1, о т л н ч а ю - щ и и с я тем, что привод зажимных губо к каждого захвата выполнен в виде копиров, расположенных по направлению перемещения дополнительных рычагов, причем два копира закреплены на барабане и предназначены для взаимодействия с губками при зажиме концов шторки, а два других - для освобождения концов шторки - закреплены на установленной на барабане каретке с приводом ее перемещения от копира, закрепленного на станине.
3.Автомат по По 1, о т л и - чающийся тем, что привод
поворота рычагов для свертки обечайки выполнен в виде кинематически связанных с ними толкателей, установленных в каждой рабочей позиции
Gnpaf niia с оямс жиостью параллельного перемещения от соответствующих копиров, закрепленных на станине, причем кажцьп толкатель с)абже подпружи 1ен- ным в направлении его перемещения стержнем, а также установочным винтом, при этом торец установочного винта одного из толкателей размещен с возможностью контактирования с торцем стержня другого толкатеатя.
4. Автомат noii.l, отличаю- щ и и с я тем, что механизм загрузки выполнен в виде размещенных на станине толкателя и последовательно расположенггых в радиальном к оси барабана направлении лотка с параллельными боковыми стенками и лотка с рас- ходящимися боковыми стенками, снабженного на выходе параллельными выступами для Р1аправления концевых участков шторки в зажимные губки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ НАПИЛЬНИКОВ | 1971 |
|
SU426735A1 |
| Автомат для сборки крестовин карданного вала автомобиля | 1980 |
|
SU904966A2 |
| Автомат для сборки тарелок и сухарей с клапанами ДВС | 1990 |
|
SU1761432A1 |
| УСТРОЙСТВО ДЛЯ СБОРКИ ЭЛЕКТРИЧЕСКИХ КОНДЕНСАТОРОВ | 1973 |
|
SU399924A1 |
| Автомат для сборки карданных шарниров | 1987 |
|
SU1489960A1 |
| Сборочный автомат | 1981 |
|
SU967768A1 |
| Многопозиционный сборочный автомат | 1986 |
|
SU1362606A1 |




Изобретение относится к машиностроению и позволяет расширить технологические возможности за счет обеспечения возможности свертывания и фиксации собираемых деталей малой жесткости. В момент остановки барабана 4 обечайка и гофрированная шторка подаются механизмом загрузки на гибкий элемент 10. При этом крайние гофры шторки располагаются между захватами 8, 9 и губками 14, 15. Затем барабан 4 поворачивается и одновременно захваты 8, 9 и рычаги 6, 7 получают движение. Благодаря этому губки 14, 15 сходят с упоров 16, 18 и фиксируют крайние гофры шторки. Захваты 8, 9 поворачиваются до тех пор, пока края шторки не соединятся, после чего их скрепляют. Далее каретка 20, получая движение от копира 2, поднимается и отводит губки 14, 15. При этом шторка освобождается от захватов 8, 9 и принимает цилиндрическую форму, а рычаги 6, 7 продолжают движение навстречу друг другу. В результате этого обечайка также принимает цилиндрическую форму. 1 з.п. ф-лы, 19 ил.
Фиг.1
Ж
I
фиг. 2
г.В
H-h I Г±Фиг. 6
Т
л
35 V
Фиг. 7
JfH3
3235 J
f 3D 31
Фиг. 9
31 Д-&
.
31
37 31
I йГя
30
7 30 1 Ю
х
1Z
8
J(
Фиг л
6
Фиг. //
//
Фиг. /J
Фиг. 15
//
Фиг.16
Фив. IS
фиг. 17
Фиг. 19
| Роторное устройство для сборки роликов и втулок роликовых цепей | 1982 |
|
SU1140926A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
