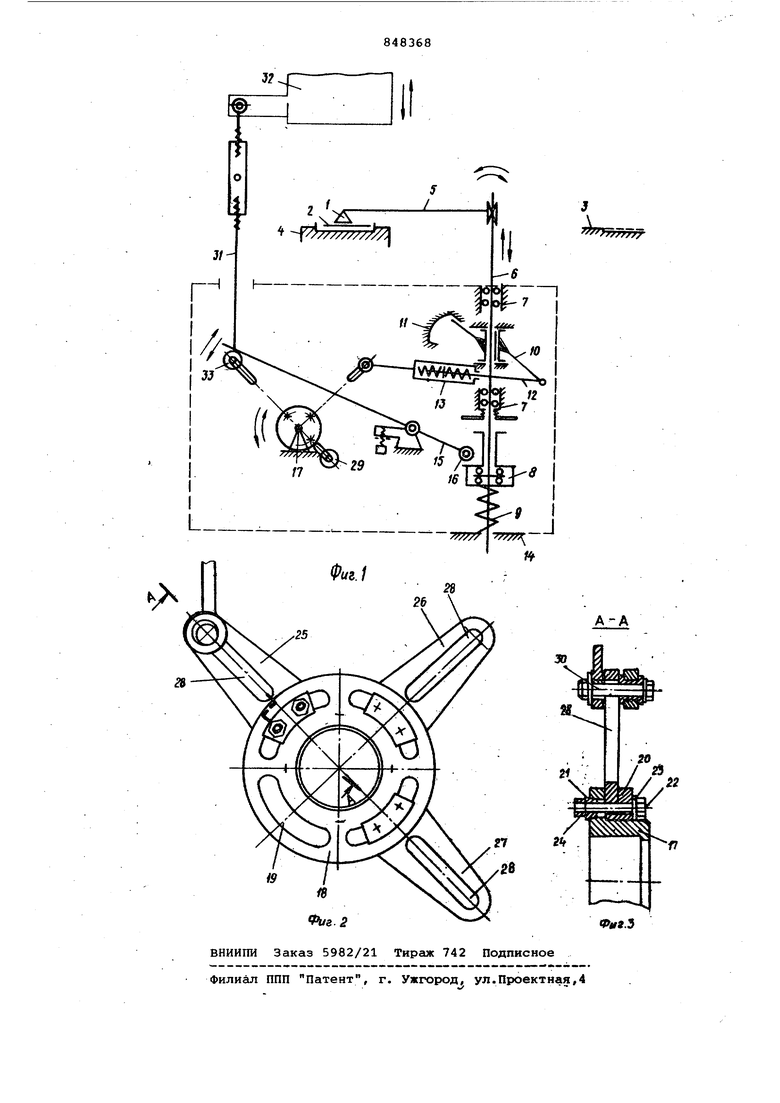
Изобретение относится к кузнечно прессовому Мсшшностроению и может быть использовано для подачи деталей (заготовок) в рабочую зону пресса. Известна механическая рука к прес су, содержащая корпус, вертикально установленный в нем вал с захватным органом, приводимый в возвратно-врацательное движение через тягу и в возвратно-поступательное движение вдоль оси через двуплечий рычаг. В известной механической руке двупле.чий рычаг и тяга связаны с преобразующим механизмом 13 Известная механическая рука недостаточно надежна в работе. Цель изобретения - повышение надежности работы. Поставленная цель достигается тем, что преобразующий механизм выпо нен в виде диска с дугообразными па зами, в которых установлены по меньшей мере три ползушки, имекщие каждая радиальный паз, дополнительной тяги, один конец которой связан с подвижной частью пресса, а другой установлен в пазу одной ив ползушек двух роликов, один из которых закреп лен в том же пазу с возможностью взаимодействия с двуплечим рычагом. а другой ролик закреплен в пазу другой ползушки также с возможностью взаимодействия с двуплечим рычагом, тяга закреплена одним концом в пазу ползушки, расположенной между ползушками, несущими ролики. На фиг. 1 изображена механическая рука к прессу, кинематическая схема; на фиг. 2 - преобразующий механизм} на фиг. 3 - разрез- А-А на фиг. 2. Механическая рука к прессу содержит захватный орган 1 для зажима деталей 2 (заготовок) с трафарета 3 и подачи их в штамп 4. ЗахватньШ орган 1 закреплен на одном из концов рычага 5, другой конец которого закреплен на вертикальном.валу 6. Вал 6установлен в шариковых Onopcix 7 и шариковой опоре 8, подпружинен в вертикальном направлении пружиной 9, ав его средней части между опорами 7смонтирован ычаг 10 со скользящей шпонкой и с ограничителем 11 поворота. Рычаг 10 шарнирно связан с тягой 12, имеющей узел компенсации 13. Опоры 7 и 8 закреплены в корпусе 14 и в нем шарнирно установлен двуплечий рычаг 15, на одном из концов которого закреплен ролик 16, взаимодействуюций с опорой 8, связанной с валом 6.
В корпусе 14 щарнирно закреплен преобразующий механизм 17, содержащий диски 18 (фиг. 2) с дугообразными пазами 19. На диске 18 с помощью кольца 20, планки 21, болтов 22, шайб 23 и гаек 24 закреплены ползуш 1си 25, 26 и 27 с возможностью перемещения по пазам 19. В ползушках 25, 26 и 27 выполнены радиальные пазы. В пазу 28 ползушки 26 закреплен один конец тяги 12, а в пазу 28 ползушки 27 закреплен ролик 29, взаимодействуквдий с двуплечим рычагом 15. В пазу 28 ползушки 25 установлена ось 30, на которой закреплен один конец тяги 31, связанной другим концом с подвижной частью 32 пресса (не показан). На оси 30 установлен также ролик 33, взаимодействующий с двуплечим рычагом 15.
Механическая рука, к прессу работает следующим образом.
При нахождении подвижной части 32 вверху, ролик 33 воздействует на двуплечий рычаг 15, и он через опору 8 перемещает вал 6 вниз, сжимая пружину 9. Захватный орган 1 опускается на штамп 4. При перемещении подвижной части 32 вниз тяга 31 поворачивает диск 18. Пружина 9 перемещает вал 6 вверх, а ползушка 26 чере тягу 12 и рычаг 10 поворачивает вал вокруг оси. Захватный орган 1 поворачивается совместно с валом 6, угол поворота .которого ограничен ограничителем 11 поворота.
При дальнейшем перемещении подвижной части 32 вниз ролик 29 воздействует на двуплечий рвиаг 15, а он через опору 8 перемещает вал 6 вниз сжимая пружину 9. Захватный орган 1 опускается в трафарет 3 и захватывает деталь 2.
При движении подвижной части 32 вверх тяга 31 поворачивает диск 18. Ролик 29 выходит из взаимодействия с двуплечим рычагом 15, пружина
5Г перемещает вал 6 вверх, а ползушка 26 через тягу 12 и рычаг 10 поворачивает его вокруг оси.
Затем ролик 33 воздействует на двуплечий рычаг 15, который перемещает ваш 6 вниз, сжимая пружину 9. Захватный орган 1 опускает деталь 2 в штамп 4.
Затем цикл повторяется.
Формула изобретения
Механическая рука к прессу, содержащая корпус., вертикально установленный в нем вал с захватным органом, приводимый в возвратно-вращательное движение через тягу и в возвч ратно-поступательное движение вдоль оси через двуплечий рычаг, связанный с преобразующим механизмом, с
которым связана также тяга, отличающаяся тем, что, с целью повышения надежности работы, преобразующий механизм выполнен в виде диска с дугообразными пазами, в которых установлены по меньшей мере три ползушки, имеющая каждая радиальный паз, дополнительной тяги, один конец которой связан с подвижной частью пресса, а другой установлен в пазу одной из ползушек, двух роликов, один из которых закреплен в том же пазу с возможностью взаимодействия с двуплечим рычагом, а другой ролик закреплен в пазу другой
ползушки также с возможностью взаимодействия с двуплечим рычагом,.тяга закреплена одним концом в пазу ползушки, расположенной межд.у ползушками., несущими ролики.
40 Источники информации,
принятые во внимание при экспертизе
1. Средства механизации и автоматизации холодной штамповки. РТМ 45 В 23.7.24-71. М. , 1971, с. 286-287, черт. 199 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Грейферная подача | 1989 |
|
SU1662728A1 |
| Устройство для подачи материала в зону обработки | 1987 |
|
SU1442299A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в рабочую зону пресса | 1982 |
|
SU1058686A1 |
| Механическая рука к прессу | 1988 |
|
SU1611755A1 |
| Устройство для фиксации материала в рабочей зоне штампа | 1979 |
|
SU876240A1 |
| Устройство для подачи длинномерного материала в рабочую зону штампа | 1981 |
|
SU969383A1 |
| Устройство для перемещения заготовок | 1984 |
|
SU1205973A1 |
| Устройство для подачи длинномерного материала в рабочую зону обрабатывающей машины | 1980 |
|
SU919790A1 |
| Устройство для подачи ленточного материала в зону обработки | 1980 |
|
SU897347A1 |
| Штамп для гибки изделий замкнутой формы | 1986 |
|
SU1398953A1 |