Изобретение относится к области кожевенной промышленности и может быть применено для исключения ручных вспомогательных операций при межконвейерной передаче различных листовых изделий с произвольной кромкой периметра и деформированной, т. е. не плоской, поверхностью, преимущественно чепраков, транспортируемых на разновысотно расположенных горизонтальных конвейерах в услор иях, когда такая передача по требованиям технологии производства сопряжена с необходимостью одновременной укладки чепраков в кипы одинаковой высоты, позиционно формируемые на нижнем приемном конвейере и периодически сдвигаемые по мере достижения згой высоты из зоны уклад -,.
Целью изобретения яв. ;яется повышение надежности в работе при передаче плоских изделий типа чепраков.
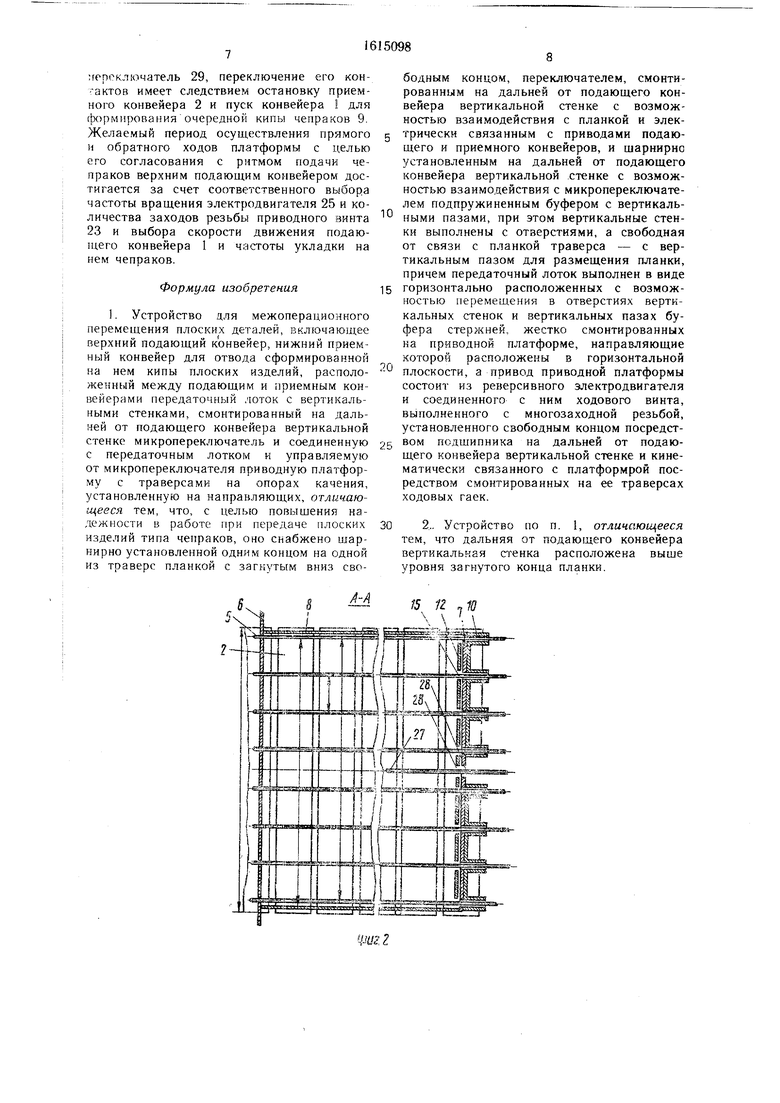
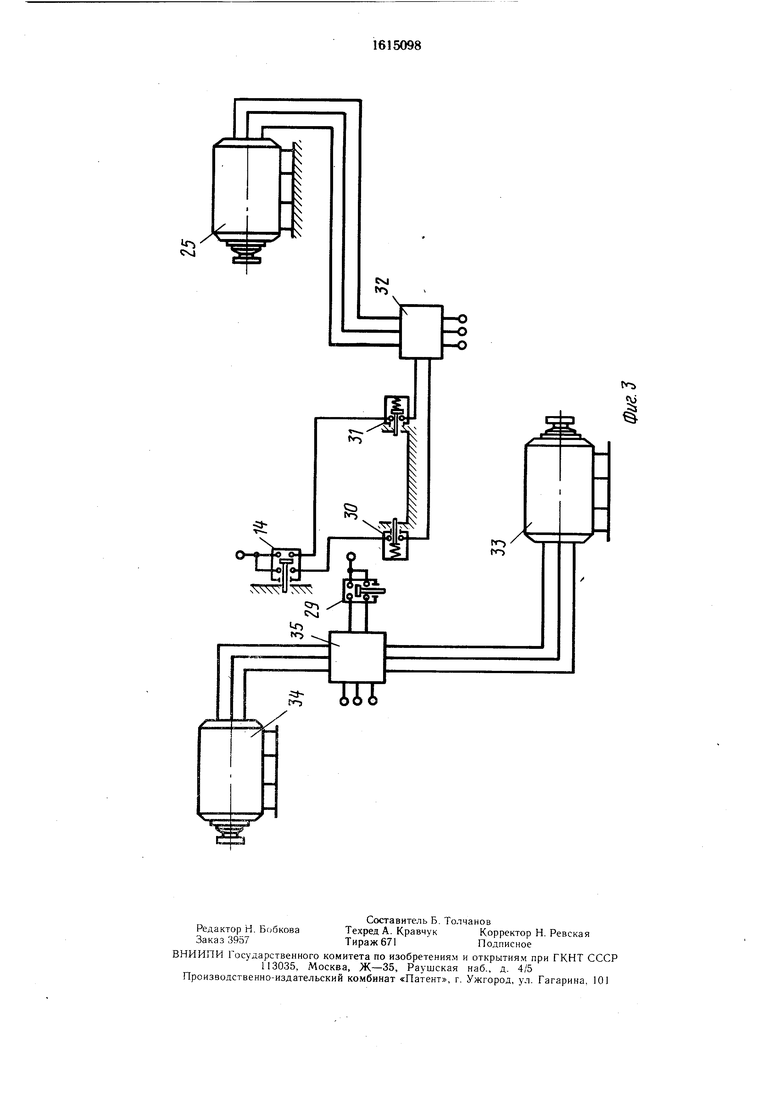
На фиг. 1 изображен продольный разрез предлагаемого устройства; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - трическая блок-схема управления.
Устройство имеет верхний подающий конвейер 1, нижний приемнг:лй конвейер 2 и расположенный между ними склиз с наклонным плоским дном 3, боковыми стенками 4 и передаточным лотком, горизонта л р -нос: дно которого образовано параллельными осям конвейеров и склиза стержнями 5, консольно пропущенными через отверстия ближней и дальней от склиза и конв€:йе- ра 1 вертикальных стенок. Стенки 6-8 использованы в качестве средств для продольного и поперечного выравниваний кромок плоск.их изделий типа чепраков 9 в процессе их укладки на грузонесущих пластинах приемного конвейера 2, для этого они. опущены ниже стержней 5 до образования с плоскостью пластин конвейера 2 малого зазора, препятствующего выпадению
чепраков из расположенного под стержнями 5 объема ячейки для -укладки чепраков, образуемой стенками 6, 8 и грузоg несущими пластин зми конвейера 2. Стенка 7 при этом опущена ниже стержней 5 лишь до отметки, обеспечивающей свободное удаление сфорл{ированной в указанной ячейке кипы чепраков 9. На нижней части стенки 7 3aKpenjieHbi направляющие 10, обеспечиваю0 щие свободное без заклинивания скольжение консольных стержней 5 через отверс- ти.я этой стенки. На верхней части стенки 7 закреплена горизонтальная ось i I с шар нйрно подвешенной на кей поворотной планкой 12 буфера, взаимодействующей с пру5 жиной 13 регулируемого натяга и микро- iisf-ключателе i- -, зркрепленными на стен- рсе 7. В местьX лр вхождения стержней 5 1.;,-анкз 12 вьцюлнена с вертикальными пазами i., обеспечиваюи.ими вращение планки вокруг оси П. Выступающие из на- правляю цич О концы стержней 5 закреплены на траверсах 16 и 17. Эти тра- epcFi; соч.лс-ггены посредством шпилек ;8 и г-: ек i9 п; единую подвижную платформу, опкрающугося посредством опор качения в
5 в-чдг роликов 20 и . на горизокталь- ные направляющие, смонтированные над когшейером 2 из. необходимой для сзо- 5о.:лггп iiepf-Meiut-KHH сформированных кип чепраков 9 высоте м ширине. Траверсы снабжены ходовыми гзйками 22, закреп0 л-гнными в верхней части с зозможность;о регулирования их положения по высоте тра- г;ерсы. Этч гайки кинематически сопряжены с пропущенным чеэез них гзинтом 23 с .много- заходной трапецеидальной резьбой, один конец которого посредством муфты 24 сочле- нек с валом реверсивного электродвигателя 25, э другой
с подшипником 26 , закрепленным на степке
ia траве р
в плоскости симметрии платформы шарнирно закреплена планка 27, пропущенная через паз в траверсе 16 и пазы 28 в стенке 7 и поворотной планке 12. Свисающий вниз второй конец этой планки загнут и расположен по высоте с возможностью механического взаимодействия с верхним чепраком 9 кипы в конце ее формирования. На стенке 7 закреплен переключатель 29, расположенный с возможностью механического взаимодействия с планкой 27 при ее подъеме в результате контакта с чепраком кипы. Направляющие снабжены упорами для ограничения рабочего хода подвижной платформы и концевыми выключателями 30 и 31. Выключатель 31
прямого хода и выключатель 30 обратного хо- g ления потока воздуха, обтекающего падаю да своими входами подключень к контактамщий чепрак, после дний при своем свобоммикропереключателя 14, а выходами к блокуном полете вниз скользит вдоль верти32 управления реверсивным электродвигате-кальной поверхности стенки 6. Благодаря
лем 25, составляя все вместе первый не-этому кромки чепраков, укладываемых в
зависимый контур. В составе второго не-кипу, выравниваются в продольном направзависимого контура управления (фиг. 3) 20 лении. Поперечное же выравнивание кипы дополнительно показаны электродвигатель осуществляется правой и левой боковыми
стенками 8, ширина между которыми предполагается выбранной, исходя из максимальной возможной ширины чепрака. С мо33 нижнего приемного конвейера 2 и электродвигатель 34 верхнего подающего конвейера 1, а также блок 35 управления
этими электродвигателями, подключенный к 25 мента освобождения чепраком планки 12 она
переключателю 29. Стенка 7 расположена выще уровня загнутого конца планки 27.
Устройство работает следующим образом. В исходном состоянии ожидания очередпод воздействием пружины 13 возвращается в исходное положение. Несмотря на обусловленное этим переключение контактов переключателя 14 вращающийся по инерции ротор высокооборотного двигате.тя 25
ного чепрака 9, поступающего по плоское- зО продолжает перемещать платформу в прежти 3 склиза, платформа находится в крайнем левом положении, взаимодействуя с концевым выключателем 30. Стержни 5 своими свободными концами входят в отверстия стенки 6. Планка 27 находится в
нем направлении до остановки ее упором. Замыкание левой пары контактов микропереключателя 14, происходящее вслед за размыканием правой пары, приводит к реверсу электродвигателя 25 и движению платнижнем положении, опираясь на нижнюю 35 формы с возрастающей скоростью в направ- кромку паза в траверсе 16, и не вза- лении обратного ее хода к исходному поло- имодействует с переключателем 29, подво- жению, при котором срабатывает концевой дящим через нижнюю замкнутую пару контактов на вход блока 35 командный
сигнал для остановки электродвигателя 33
выключатель 30 и двигатель 25 обесточивается. С поступлением следующего очередного чепрака описанная последователь- нижнего приемного конвейера 2 и работы 0 ность событий повторяется. В каждом ра- электродвнгателя 34 верхнего подающего бочем цикле при возврате платформы в конвейера 1. Планка 12 буфера под воздействием усилия пружины 13 находится в положении, при котором она не воздействует на микропереключатель 14, поэтому пра- ,g вая пара контактов этого микропереключате-- , ля, подводящая через концевой выключатель 31 к блоку 32 сигнал для включения электродвигателя 25, пока разомкнута. При поступлении с вер.хнего подающего конвейера 1 по наклонней плоскости 3 склиза gg электродвигателя 34 и включению электрочепрака 9 он за счет накопленной в ijpo- двигателя 33. Нижний приемный конвейер, цессе движения по склизу кинетической энергии преодолевая трение о стержни 5 проскользнет по ним и поворачивает планку 12 буфера. Нажим этой планки на микропереключатель 14 имеет сл ;дствием подачу 55 через заикнувшуюся пряную пару его контактов и выключатель 31 сигнала на вход блока 32 для включения электродвигателя 25
исходное положение планка 27 контролирует высоту формируемой кипы в ячейке для укладки чепраков. С достижением необходимой высоты кипы эта планка при очередном возврате платформы, взаимодействуя с верхним чепраком кипы, приподнимается и воздействует на переключатель 29. Переключение его контактов приводит к остановке электродвигателя 34 и включению
начиная двигаться, удаляет оформированную на его грузонесущих пластинах кипу чепраков с высотой, задаваемой регулированием положения загнутого конца планки 27, из ячейки. В момент, когда кипа сдвинется на желаемое расстояние и планка 27. потеряв опору, под действием собственного веса опустится вниз, освобождая от нажимг:
и его вращения в направлении прямого хода платформы и стержней 5 вместе с находящимся на них чепраком. Поэтому с момента начала перемещения с возрастаю- щей скоростью стержней 5 чепрак 9 продолжает удерживать планку 12 в состоянии взаимодействия с микропереключателем 14 до тех пор, пока уходящие нз-под чепрака концы стержней не дадут чепраку возможность упасть вниз. Поскольку в начале своего свободного падения чепрак наклоняется в сторону стенки 6 в момент, когда выскальзывающие из-под него концы стержней минуют точку расположения центра тяжести чепрака, то силой сопротив
мента освобождения чепраком планки 12 она
под воздействием пружины 13 возвращается в исходное положение. Несмотря на обусловленное этим переключение контактов переключателя 14 вращающийся по инерции ротор высокооборотного двигате.тя 25
нем направлении до остановки ее упором. Замыкание левой пары контактов микропереключателя 14, происходящее вслед за размыканием правой пары, приводит к реверсу электродвигателя 25 и движению платвыключатель 30 и двигатель 25 обесточивается. С поступлением следующего очередного чепрака описанная последователь- ность событий повторяется. В каждом ра- бочем цикле при возврате платформы в электродвигателя 34 и включению электродвигателя 33. Нижний приемный конвейер,
исходное положение планка 27 контролирует высоту формируемой кипы в ячейке для укладки чепраков. С достижением необходимой высоты кипы эта планка при очередном возврате платформы, взаимодействуя с верхним чепраком кипы, приподнимается и воздействует на переключатель 29. Переключение его контактов приводит к остановке электродвигателя 34 и включению
выключатель 30 и двигатель 25 обесточивается. С поступлением следующего очередного чепрака описанная последователь- ность событий повторяется. В каждом ра- бочем цикле при возврате платформы в электродвигателя 34 и включению электродвигателя 33. Нижний приемный конвейер,
начиная двигаться, удаляет оформированную на его грузонесущих пластинах кипу чепраков с высотой, задаваемой регулированием положения загнутого конца планки 27, из ячейки. В момент, когда кипа сдвинется на желаемое расстояние и планка 27. потеряв опору, под действием собственного веса опустится вниз, освобождая от нажимг:
;гер« кл чатель 29, переключение его кон- бодным концом, переключателем, смонти- актов имеет следствием остановку прием- рованным на дальней от подающего конного конвейера 2 и пуск конвейера 1 для вейера вертикальной стенке с возмож- (|х)рмирования очередной кипы чепраков 9.ностью взаимодействия с планкой и элекЖелаемый период осуществления прямого g трически связанным с приводами подаю- и обратного ходов платформы с целью щего и приемного конвейеров, и щарнирно его согласования с ритмом подачи чепраков верхним подающим конвейером достигается за счет соответственного выбора
частоты вращения электродвигателя 25 и ко-, .т г- г
личества заходов резьбы приводного винта ными пазами, при этом вертикальные стен- 23 и выбора скорости движения подаю- ки выполнены с отверстиями, а свободная
от связи с планкой траверса - с вертикальным пазом для размещения планки, причем передаточный лоток выполнен в виде 15 горизонтально расположенных с возможностью перемещения в отверстиях вертикальных стенок и вертикальных пазах буфера стержней, жестко смонтированных на приводной платформе, направляющие
установленным на дальней от подающего конвейера вертикальной стенке с возможностью взаимодействия с микропереключателем подпружиненным буфером с вертикальщего конвейера 1 и частоты укладки на нем чепраков.
Формула изобретения
1. Устройство для межоперационного перемещения плоских деталей, включающее верхний подающий конвейер, нижний приемный конвейер для отвода сформированной на нем кипы плоских изделий, расположенный между подающим и приемным конвейерами передаточный лоток с вертикальными стенками, смонтированный на дальней от подающего конвейера вертикальной
20
которой расположены в горизонтальной плоскости, а привод приводной платформы состоит из реверсивного электродвигателя и соединенного с ним ходового винта, выполненного с многозаходной резьбой, установленного свободным концом посредстстенке микропереключатель и соединенную 25 ° подшипника на дальней от подаюс передаточным лотком и управляемую от микропереключателя приводную платформу с траверсами на опорах качения, установленную на направляющих, отличающееся тем, что, с целью повышения надежности в работе при передаче плоских изделий типа чепраков, оно снабжено шар- нирно установленной одним концом на одной из траверс планкой с загнутым вниз сво30
щего конвейера вертикальной стенке и кинематически связанного с платформрой посредством смонтированных на ее траверсах
ходовых гаек.
2... Устройство по п. 1, отличающееся тем, что дальняя от подающего конвейера вертикальная стенка расположена выше уровня загнутого конца планки.
трически связанным с приводами подаю- щего и приемного конвейеров, и щарнирно
, .т г- г
ными пазами, при этом вертикальные стен- ки выполнены с отверстиями, а свободная
установленным на дальней от подающего конвейера вертикальной стенке с возможностью взаимодействия с микропереключателем подпружиненным буфером с вертикаль
которой расположены в горизонтальной плоскости, а привод приводной платформы состоит из реверсивного электродвигателя и соединенного с ним ходового винта, выполненного с многозаходной резьбой, установленного свободным концом посредст
щего конвейера вертикальной стенке и кинематически связанного с платформрой посредством смонтированных на ее траверсах
ходовых гаек.
2... Устройство по п. 1, отличающееся тем, что дальняя от подающего конвейера вертикальная стенка расположена выше уровня загнутого конца планки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1982 |
|
SU1171278A1 |
| Транспортная система | 1988 |
|
SU1572945A1 |
| Устройство для раскроя кожевенного полуфабриката | 1989 |
|
SU1772156A1 |
| Устройство для выгрузки деталей с подвесного конвейера | 1989 |
|
SU1745648A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Устройство для поштучной выдачи длинномерных цилиндрических изделий из пачки | 1989 |
|
SU1787910A1 |
| Устройство для автоматической сборки составных частей химических источников тока | 1991 |
|
SU1790016A1 |
| Установка для укладки яиц в прокладки | 1981 |
|
SU1024376A1 |
| Установка выбивки стопочных безопочных форм | 1981 |
|
SU982843A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
Изобретение относится к кожевенной промышленности и позволяет повысить надежность работы устройства при передаче плоских изделий типа чепраков. Устройство включает верхний подающий конвейер (К) 1, нижний приемный К 2, расположенный между ними передаточный лоток с вертикальными стенками (ВС) 6,7,8, смонтированный на ВС 7 микропереключатель и соединенную с передаточным лотком платформу. Последняя установлена на горизонтальных направляющих и выполнена в виде траверс с опорами качения в виде роликов и ходовыми гайками. Через гайки пропущен ходовой винт с многозаходной резьбой, один конец которого установлен на ВС 7 через подшипник, а другой соединен с реверсивным электродвигателем. На одной траверсе шарнирно установлена концом планка (П) 27 с загнутым свободным концом, контактирующая со смонтированным на ВС 7 переключателем, электрически связанным с приводами подающего К 1 и К 2. На ВС 7 шарнирно установлен буфер в виде подпружиненной поворотной П 12 с вертикальными пазами. В ВС 6 имеются отверстия, а в другой траверсе - вертикальный паз для размещения П 27. Передаточный лоток выполнен в виде горизонтально расположенных стержней 5, жестко смонтированных на платформе. Стержни размещены в отверстиях ВС 6, 7 и пазах П 12. Микропереключатель электрически связан с электродвигателем. Плоские изделия в виде черпаков 9 поштучно подаются на стержни 5 и при взаимодействии торцом с П 12 отклоняют последнюю. От микропереключателя включается электродвигатель 25 и, перемещая платформу, выводит из под черпака стержни 5. Черпак укладывается на К 2. После формирования на К 2 кипы черпаков 9 на верхний из них ложится П 27, приподнимаясь и взаимодействуя с переключателем, который включает привод К 2 и отводит сформированную кипу черпаков. 1 з.п. ф-лы, 3 ил.
/5 П т 10 I
tv
| Безлифтное устройство для укладки досок в пакеты | 1962 |
|
SU152420A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для штабелирования изделий | 1979 |
|
SU770966A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
