(54) АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванических линий | 1981 |
|
SU1044685A1 |
| Автооператор для гальванических линий | 1980 |
|
SU901370A1 |
| Автоматическая линия для гальванохимической обработки крупногабаритных листовых изделий | 1983 |
|
SU1084342A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
| Автооператор для гальванических линий | 1983 |
|
SU1182093A1 |
| Автооператор для гальванических линий | 1980 |
|
SU952704A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Автооператор линий гальванической и химической обработки | 1985 |
|
SU1306986A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |
| Автооператор для гальванических линий | 1981 |
|
SU990889A1 |
Изобретение относится к оборудованию для гальванической обработки металлов, а именно к автооператорам, совершающим операции по переносу и установке подвесок с изделиями на линиях гальванопокрытий.
Известные автооператоры состоят из pcUi4H, перемещающейся вдоль гальванической линии, одной каретки с захватами и механизмами вертикального перемещения каретки. Известный автооператор переносит вдоль линии на захватах каретки подвеску с обрабатываемыми изделиями и опускает (или извлекс ет) ее в ванну в ссхэтветстВИИ с технологическим процессом ij и 2.
Недостатками известных автооператоров являются низкая производительность вследствие необходимости соверш ь большое количество холостых возвратных ходов при переносах подвесок из одной ванной в другую, расход энергии на холостые ходы, уменьшение срока службы автооператора вследствие большого количества времени работы его на выполнении обработки одной партии изделий, а также простой гальванических ванн в период времени после извлечения
. одной подвески до установки следующей подвески.
Цель изобретения - повышение производительности труда.
Для выполнения поставленной цели, автооператор для гальванических линий, содержащий раму с вертикальными стойками и опорными катками, каретки с захватами, привод гори10зонтального перемещения рамы, привод вертикального перемещения кареток снабжен Y-образными направляющими, укрепленными на вертикальных стойках и гибким тяговым орга15ном конечной дллны для связи между собой кареток, установленных с возможностью перемещения поY -образным направляющим.
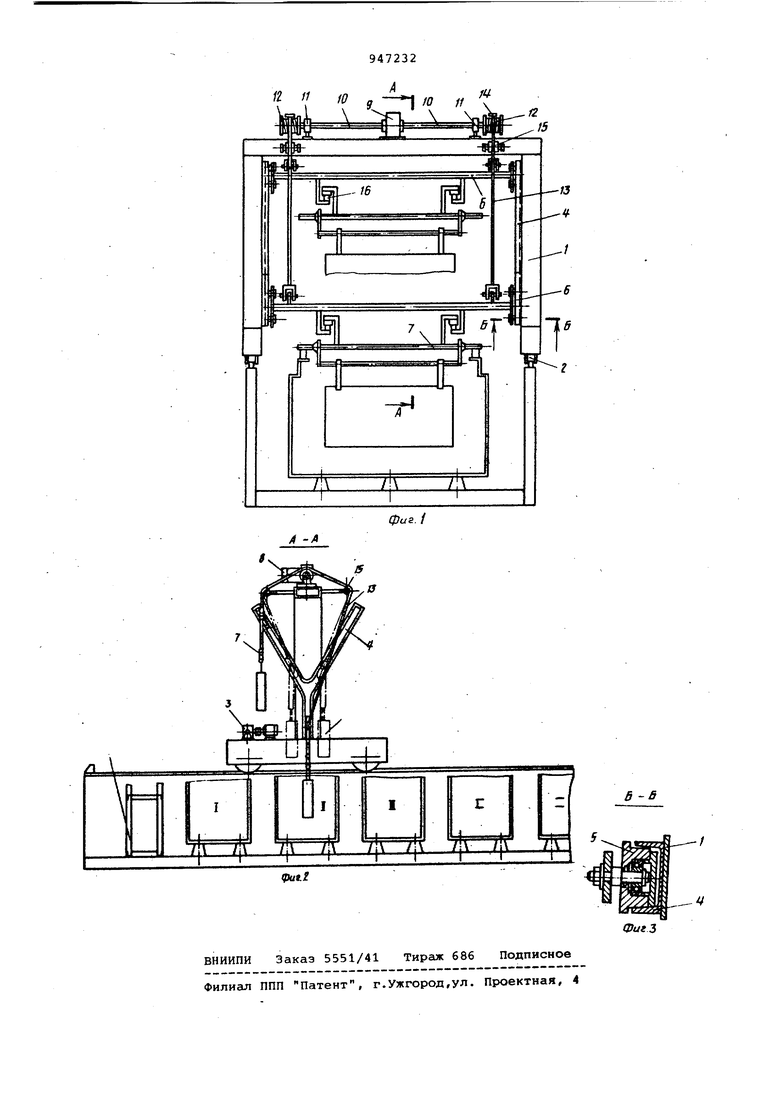
На фиг.1 изображен автооператор,
20 общий вид; на фиг.2 - разрез А-А на фиг.; на фиг.З - разрез Б-Б на фиг.2.
Автооператор состоит, из рамы 1 с вертикальными стойками, опорными
25 катками 2 и приводом 3 горизонтального перемещения, на вертикальных стойках рамы закреплены Y-образные направляющие 4, по которым перемещаются ролики 5 двух кареток 6, с об30 рабатываеьодми деталями 7. На горизонтальной балке рамы рас положен привод вертикального перемещения кареток 6. Привод состоит из электродйигателя 8, редуктора 9, валов 10, расположенных на подшипниках 11. На концах валов 10 жестко закреплены барабаны 12 с винтово нарезкой. На барабаны наложено несколько витков гибкого тягового орг на-каната 13. Канаты имеют конечную длину, середина каната крепится зажимом 14 на средних канавках бараба нов для предупреждения проскальзывания при подъеме (опускании) кареток. Концы канатов, огибая отклоняющи блоки 15, крепятся к кареткам. Последние состоят из поперечной балки, имеющей захваты 16. На концах балки {размещены ролики 5, которые перемещаются по направляющим 4. Автоопера тор снабжен конечными выключателями для обеспечения автоматической оста вки ц движения рамы, кареток и размещения захватов. Автооператор работает следующим образом. Рассмотрим работу автооператора, например, при обслуживании гальванической линии из 5 ванн. На месте загрузки на захваты 16 кареток устанавливаются две подвески с изделиями, каретки устанавливаются в среднее положение. Автооператор после включения привода горизонталь ного перемещения передвигается к ванне 1 и останавливается от воздействия на конечнЕлй выключатель, одновременно включается привод вертикального перемещения кареток при вращении барабанов 12, одна каретка опускается по направляющим и уклады вает подвеску с изделиями на ловители-токоопоры ванны. При этом вторая каретка 1тоднимается по ющим в крайнее верхнее положение. По истечении определенного времени выдержки изделий в ванне 1 включается привод и каретка с подвеской извлекается из ванны. Одновременно вторая каретка с подвеской опускается в ванну, размыкаются захваты, каретка поднимается в среднее положение и автооператор т ремещается к ванне 11. После остановки загруженная каретка опускается в ванну, оставляет подвеску, и автооператор совершает холостой загрузочно-разгрузочному месту а очередной подвеской. Затем автоператор передвигается к ванне 1 и звлекает из нее подвеску с обрабоанными деталями, одновременно опусая в ванну подвеску с необработаными деталями. Автооператор передвиается к ванне 11, извлекает и опусает подвески и переносит подвесу в ванну 11, а затем совершает хоостой ход за очередной подвеской и овторяет все ранее описанные операии, пока все ванны не будут загруены. Ванны расположены в соответствии технологическим процессом. Из поледней ванны автооператор извлекат подвеску с окончательно обработанными деталями и переносит ее к загрузочно-разгрузочному месту, где свободной кареткой принимает очередную подвеску с необработанными изделиями и оставляет подвеску с окончательно обработанньоми изделиями. Затем автооператор перемещается к ваннам последовательно перенося и меняя подвески. Включение и выключение приводов горизонтального перемещения автооператора и вертикального перемещения кареток, а также захватов обеспечивается либо системой конечных выключателей, либо программой. Формула изобретения Автооператор для гальванических линий, содержащий раму с вертикальными стойками и опорными катками, каретки с захватами, привод горизонтального перемещения рамы, привод вертикального перемещения кареток, о тличающийся тем, что, с целью увеличения производительности линии, он снабжен у-образньми направляющими, укрепленными на вертикальных стойках и гибким тяговым органом конечной длины для связи между собой кареток, установленных с возможностью перемещения по Y-образным направляющим. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР 316755, кл. В 66 С 11/12, 1969. 2.Авторское свидетельство СССР № 522287, кл. С 25 D 17/06, 1974.
