Изобретение относится к автоматизации технологических .процессов в машиностроении и может найти применение при разгрузке технологического оборудования.
Целью изобретения является расширение технологических возможностей за счет обеспечения контроля направления винтовой канавки, выполненной на наружной поверхности контролируемой детали.
На фиг. 1 показано устройство, общий вид; на фиг, 2 - вид А на фиг. 1; на фиг. 3 - профиль контролируемой детали с-правым направлением канавок; на фиг. 4 - профиль контролируемой детали с левым направлением канавок; на фиг. 5 - сечение Б-Б на фиг, 3; на фиг. 6 - сечение В-В на фиг. 3.
Устройство содержит основание 1 и тяговые цепи 2 с планками 3 для перемещаемых изделий 4, пример, с винтовым профилем. В стойке 5, расположенной на основании 1, с помощью втулки 6, гайки 7 и шплинта 8 установлена с возможностью не- полноповоротного вращения вилка Э. Под тяговыми цепями 2 на оси 10 и вилке 8 шарнирно смонтирован рычаг 11,. снабженный щупом 12, выполненным в виде Г-об- разного штыря, конический торец 13 которого расположен на пути перемещения изделия 4 с возможностью взаимодействия с неправильно ориентированными изделиями.
В средней части вилки 9 с помощью гайки 14 закреплен флажок 15, взаимодействующий с датчиками 16 и 17, закрепленными в нижней части стойки 5 и расположенными относительно рыча.га 11 под углами а и О2, соответствующими углам наклона винтового профиля изделия 4. На раме 18 основания 1 также смонтирован механизм сбрасывания неправильно ориентированных изделии 4, расположенный над щупом 12 рычага 11 и выполненный в виде сбрасывающего ролика 19 с электромагнитным приводом 20.
Для увеличения надежности ориентирования изделий 4 на основании 1 может быть установлено два и более устройств .
Устройство работает следующим образом.
При перемещении изделий 4 планками 3 цепи 2 рычаг 11 со щупом 12 своим коническим рабочим торцом 13 ощупывает форму каждого изделия 4.
При неправильно ориентированном изделии 4, т.е. захвате планками 3 изделий 4 ребристой стороной в сторону устройства,
конический рабочий торец 13 попадает во впадины изделия 4 и в зависимости от направления винтового профиля (правое или левое) скользит по впадине и отклоняет рычаг 11 со щупом 12, поворачивая при этом вилку 9 во втулке 6. При этом поворачивается флажок 15, взаимодействующий с датчиками 16 и 17 в зависимости от направления винтового профиля изделия 4 и, соответственно, направления поворота вилки 9. При повороте Флажка 15 и взаимодействия с датчиками 16 и 17 включается электромагнитный привод 20 механизма сбрасывания неправильно ориентированных изделий и выдвигается ролик 19, сталкивая неправильно ориентированное изделие 4.
При правильно ориентированном изделии 4, т.е. захвате планками 3 изделия плоской стороной к рычагу 11, последний
вместе со щупом 12 поворачивается на оси 10 в вертикальной плоскости, т,е. рабочий торец 13 рычага 11 отводится изделием 4 назад, и поджимаясь к изделию 4, скользит по плоской стороне изделия 4 вследствие
того, что центры тяжести рычага 11 и щупа 12 расположены ниже оси 10. При этом вилка 9 не поворачивается, флажок 15 не взаимодействуете датчиками 16 и 17 и механизм сбрасывания неправильно ориентированных изделий на срабатывает; изделие 4 свободно проходит на последующую обработку. При выходе из взаимодействия с правильно и неправильно ориентированными изделиями 4 рычаг 11 со щупом 12 возвращается в исходное положение под действием собственного веса.
Формула изобретения Загрузочное устройство, содержащее
основание, тяговую цепь с захватными планками, щуп, установленный с возможностью поворота в вертикальной плоскости и предназначенный для взаимодействия с неправильно ориентированной деталью, и
флажок, связанный через датчик с механизмом сбрасывания неправильно ориентированных деталей, отличающееся тем, что, с целью расширения технологических возможностей, устройство снабжено вилкой, установленной на основании с возможностью качания в плоскости, перпендикулярной плоскости поворота щупа, установленного на упомянутой вилке, и дополнительным датчиком, при этом флажок жестко
закреплен на вилке с возможностью взаимодействия с датчиками.
Вид А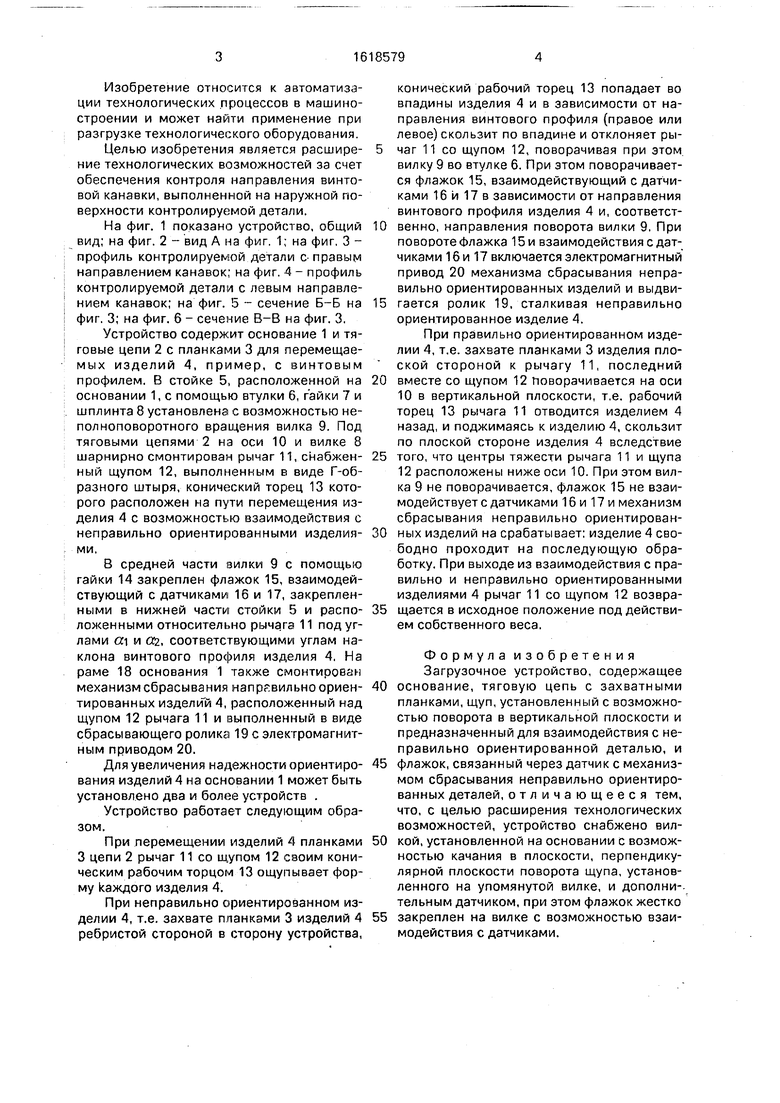
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для сбрасывания бревен | 1980 |
|
SU925807A2 |
| Шаговый конвейер-накопитель | 1985 |
|
SU1313774A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| Устройство для ориентации шпилек | 1988 |
|
SU1626072A1 |
| Устройство для позиционирования каретки металлорежущего станка | 1989 |
|
SU1715553A1 |
| Автоматическая линия для изготовления пружин | 1980 |
|
SU929403A1 |
| Устройство для контроля шероховатости поверхности отверстий | 1990 |
|
SU1758409A1 |
| Ориентирующее устройство для цилиндрических деталей с торцами разной формы | 1989 |
|
SU1743792A1 |
| Головка для автоматического нарезания резьбы | 1985 |
|
SU1266683A1 |
Изобретение относится к автоматизации технологических процессов в машиностроении и может быть использовано при загрузке технологического оборудования. Целью изобретения является расширение технологических возможностей за счет обеспечения контроля направления винтовой канавки, выполненной на наружной поверхности контролируемой детали. Устройство содержит основание 1, тяговые цепи 2 с планками 3 для перемещения изделий 4, имеющих, например, винтовой профиль. На вилке 9 шарнирно установлен рычаг 11 со щупом 12 и флажок 15. Торец 13 шупа 12 попадает во впадины изделия 4 и в зависимости от направления винтового профиля отклоняет рычаг 11, поворачивая при этом вилку 9. При этом поворачивается флажок 15, взаимодействующий с датчиком 16 или 17. Срабатывает механизм сбрасывания неправильно ориентированной детали, выполненный в виде ролика 19. 6 ил. 13 Ё ON 00 СП 1 Ю
11
16
Л г- в
15
12
Ц
П
Фиг.18-J
А 5 в
15
| Загрузочное устройство | 1985 |
|
SU1423349A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
