(Л
С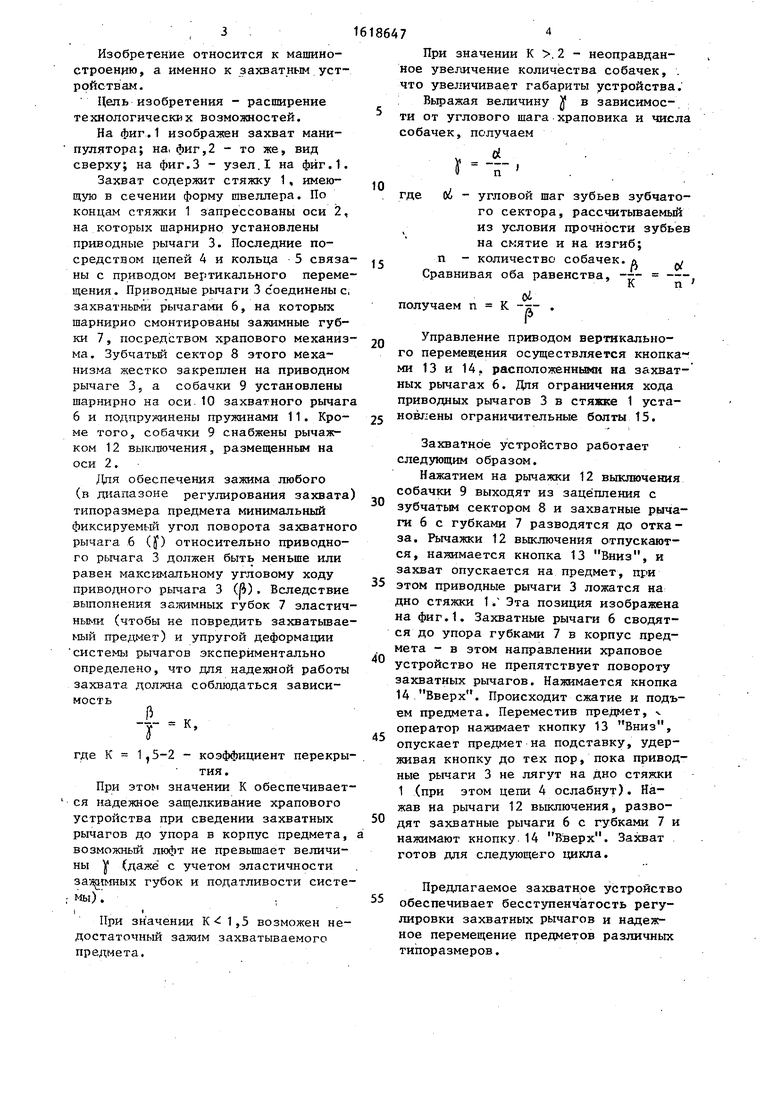
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1983 |
|
SU1189675A1 |
| Зажимное устройство | 1988 |
|
SU1608034A1 |
| Захват манипулятора | 1986 |
|
SU1313701A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Устройство к кольцевым ватерам для автоматической замены шпуль | 1946 |
|
SU69800A1 |
| МАШИНА ДЛЯ ОБВЯЗЫВАНИЯ ТЮКОВ ПОЛОСОВЫМ ЖЕЛЕЗОМ | 1930 |
|
SU38583A1 |
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1987 |
|
SU1503948A1 |
| Устройство для резки и сборки проводов в пакет | 1983 |
|
SU1302385A1 |
| Устройство для формированияиздЕлий "МюзлЕ | 1977 |
|
SU816637A1 |
| Щеточный механизм к запарочным тазам | 1941 |
|
SU63385A1 |
Изобретение относится к области машиностроения, а именно к захватным устройствам.Целью изобретения является расширение технологических . возможностей. Захватное устройство состоит из приводных рычагов 3 и захватных рычагов 6 с шарнирно смонтированными на них губками 7. Приводной рычаг и захватный рычаг связаны мевду собой посредством храпового механизма с числом собачек, определяемым по формуле п К #« Э , где п - количество собачек; К - -коэффициент перекрытия, равный 1,5- 2; oi - угловой шаг зубьев зубчатого сектора; fb - максимальный угловой ход приводного рычага. 3 ил.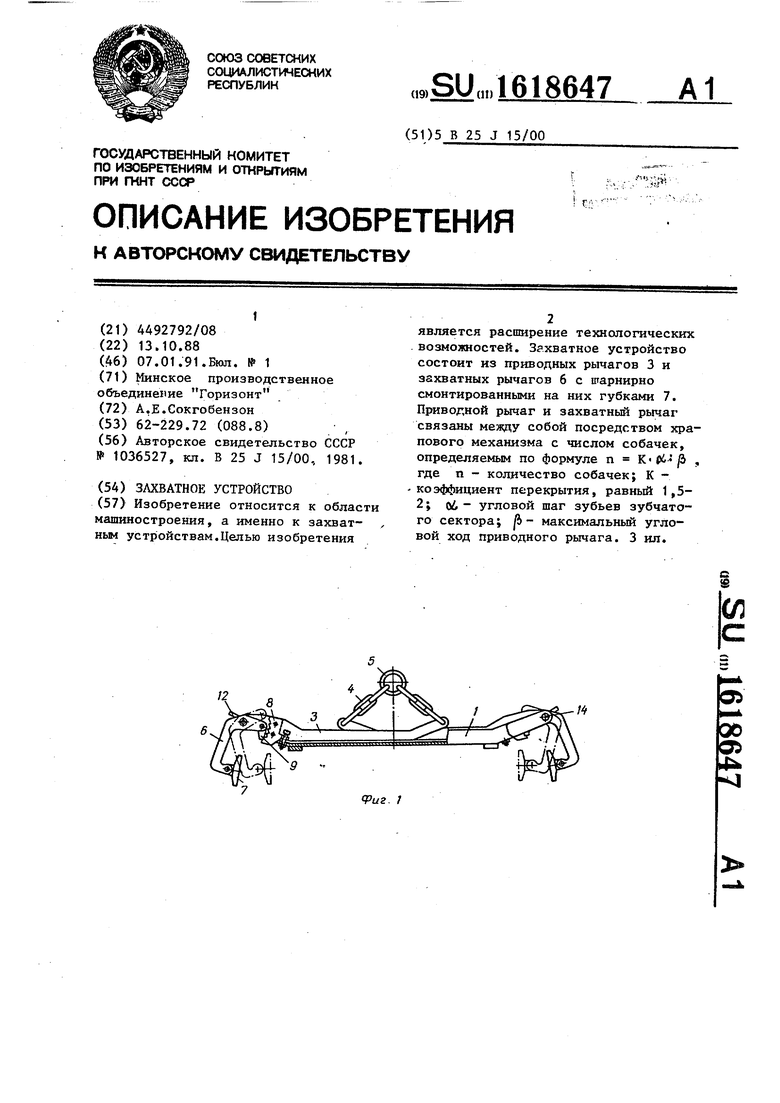
12
О
00 ОЭ Јъ
Фиг. ;
10
15
20
25
Изобретение относится к машиностроению, а именно к захватным устройствам.
Цель изобретения - расширение технологических возможностей.
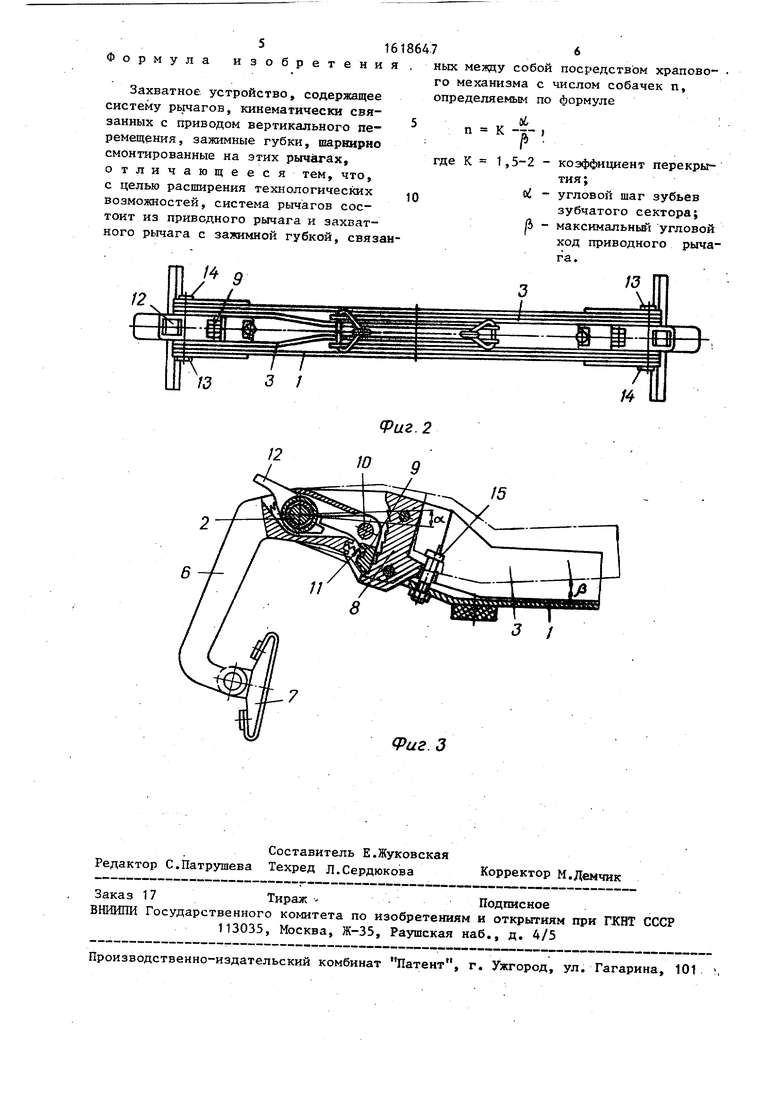
На фиг.1 изображен захват мани- пулятора; на, фиг,2 - то же, вид сверху; на фиг.З - узел.1 на фйг.1.
Захват содержит стяжку 1, имеющую в сечении форму швеллера. По концам стяжки 1 запрессованы оси 2, на которых шарнирно установлены приводные рычаги 3. Последние посредством цепей 4 и кольца 5 связаны с приводом вертикального перемещения. Приводные рычаги 3 соединены с, захватными рычагами 6, на которых шарнирно смонтированы зажимные губки 7, посредством храпового механизма. Зубчатый сектор 8 этого механизма жестко закреплен на приводном рычаге 3, а собачки 9 установлены шарнирно на оси 10 захватного рычага 6 и подпружинены пружинами 11. Кроме того, собачки 9 снабжены рычажком 12 выключения, размещенным на оси 2.
Для обеспечения зажима любого (в диапазоне регулирования захвата) типоразмера предмета минимальный фиксируемый угол поворота захватного рычага 6 (jf) относительно приводного рычага 3 должен быть меньше или равен максимальному угловому ходу приводного рычага 3 (ft), Вследствие выполнения зажимных губок 7 эластичными (чтобы не повредить захватываемый предмет) и упругой деформации системы рычагов экспериментально определено, что для надежной работы захвата должна соблюдаться зависимость
11 -к
-- - л,
О45
где К 1,5-2 - коэффициент перекрытия.
При этом значении К обеспечивает- ся надежное защелкивание храпового устройства при сведении захватных 50 рычагов до упора в корпус предмета, а возможный люфт не превышает величины у (даже с учетом эластичности зажимных губок и податливости систеМЫ).. 55
При значении К 1,5 возможен недостаточный зажим захватываемого предмета.
30
35
40
16186474
При значении К .2 - неоправданное увеличение количества собачек, . что увеличивает габариты устройства. . Выражая величину J в зависимости от углового шага храповика и числа собачек, получаем
0
5
0
5
45
50
55
0
35
40
У -
У п
где Oi - угловой шаг зубьев зубчатого сектора, рассчитываемый из условия прочности зубьев на смятие и на изгиб; количество собачек, л
п п
Сравнивая оба равенства, --К
Oi получаем п К -g- .
Управление приводом вертикального перемещения осуществляется кнопка- ми 13 и 14. расположенными иа захват- ных рычагах 6. Для ограничения хода приводных рычагов 3 в стяжке 1 установлены ограничительные болты 15.
Захватное устройство работает следующим образом.
Нажатием на рычажки 12 выключения собачки 9 выходят из зацепления с зубчатым сектором 8 и захватные рычаги 6 с губками 7 разводятся до отка - за. Рычажки 12 выключения отпускаются, нажимается кнопка 13 Вниз, и захват опускается на предмет, при этом приводные рычаги 3 ложатся на дно стяжки 1. Эта позиция изображена на фиг.1. Захватные рычаги 6 сводятся до упора губками 7 в корпус предмета - в этом направлении храповое устройство не препятствует повороту захватных рычагов. Нажимается кнопка 14 Вверх. Происходит сжатие и подъем предмета. Переместив предмет, ч оператор нажимает кнопку 13 Вниз, опускает предмет на подставку, удерживая кнопку до тех пор, пока приводные рычаги 3 не лягут на дно стяжки 1 (при этом цепи 4 ослабнут). Нажав на рычаги 12 выключения, разводят захватные рычаги 6 с губками 7 и нажимают кнопку.14 Вверх. Захват готов для следующего цикла.
Предлагаемое захватное устройство обеспечивает бесступенчатость регулировки захватных рычагов и надежное перемещение предметов различных типоразмеров.
12
Фиг. 3
| Захват автоматического манипулятора | 1981 |
|
SU1036527A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
