Фиг г
Изобретение относится к железно - дорожному транспорту и касается кон- , струкции турникетно-крепежных устройств для транспортирования грузов по железной дороге и может быть использовано для перевозки, например, длинномерных строительных конструкций.
Цель изобретения - повышение сох- ранности перевозимых грузов путем плавного демпфирования продольных инерционных нагрузок.
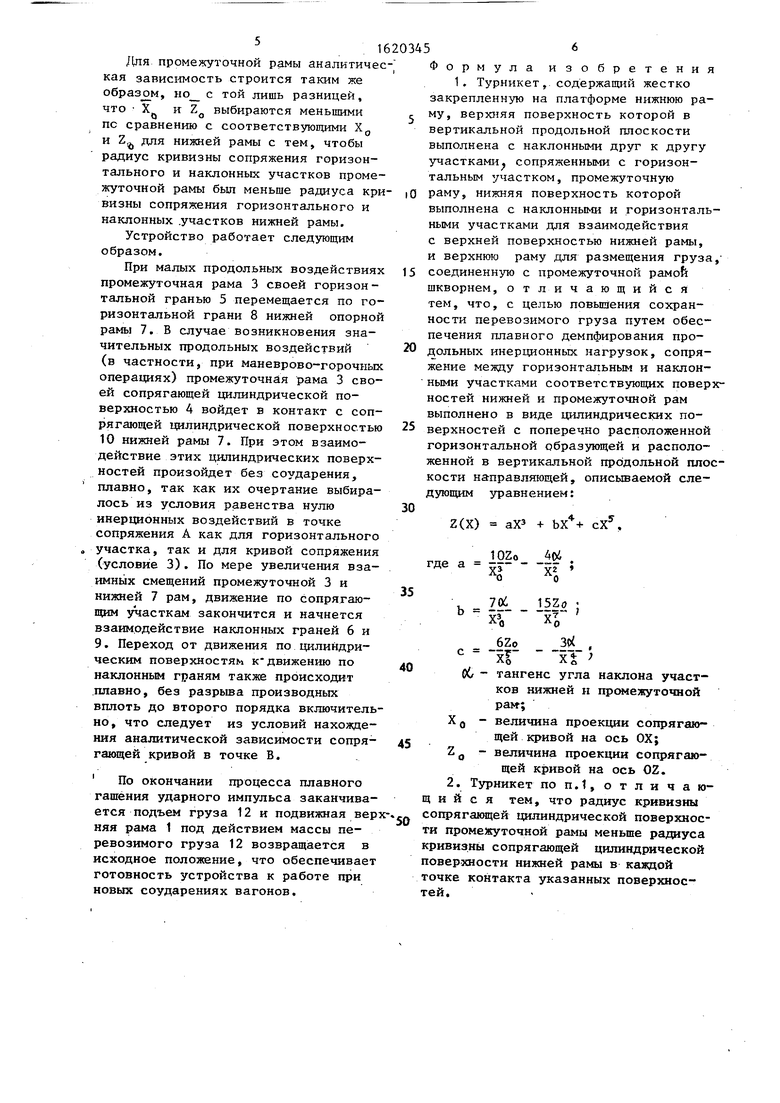
На фиг.1 изображено размещение и крепление транспортируемого груза на сцепе двух платформ, общий вид; на фиг.2 - узел I на фиг.1; на фиг.З - графики функций сопрягающих кривых горизонтальной и наклонных граней нижней и промежуточной рам. 1
Устройство содержит подвижную верхнюю раму 1, связанную шкворнем 2 с промежуточной рамой 3. Нижняя поверхность рамы 3 выполнена в виде сопряженных между собой посредством цилиндрических участков 4 горизонтальной 5 и наклонных 6 участков. Указанная поверхность рамы 3 контактирует с верхней поверхностью нижней рамы 7 по соответствующим горизонтальному 8, наклонным 9 и цилиндрическим 10 участкам.Рама 7 жестко закреплена на платформе 11. Груз 2 размещен на верхней раме 1.
Цилиндрические участки верхних и нижних поверхностей рам 7 и 3 соответственно строятся по следующим зависимостям.
Для участков сопряжения нижней рамы (для промежуточной рамы рассуж-; дения аналогичны). На фиг.З т.А - точка сопряжения горизонтального и криволинейного участков нижней рамы; ,ТоВ - точка сопряжения криволиней- ного и наклонного участков ниж- ней рамы; ср - угол наклона наклонных участков нижней рамы; Хр - величина проекции на ОХ сопрягающей кривой АВ нижней рамы; Zu - величина проекции на OZ сопрягающей кривой АВ нижней рамы.
Ставится задача - найти такую планую кривую Z(X), которая обладала бы следующими свойствами: Для точки А.
В точке сопряжения А горизонталь ный участок и сопрягающая кривая долны иметь одну и ту же аппликату, т.е. при X О Z 0.
2. Вертикальная проекция скорости V в т.А должна быть одинакова для сопрягающихся участков. Для горизонтального участка
w - v -|- . о,
откуда для второго участка получаем условие: при
х - о 2х ° dx
о
3. В точке сопряжения участков А вертикальная проекция силы инерции F ин должна быть одинаковой для обоих участков. Для первого t
участка
рии 0; следовательно,для второго
участка должно быть выполнено уелоjj 7
вне: при - .X 0 0.
Для точки В аналогично получим три следующих условия:
4, 5, 6,
Z(X0) - Zfl; dZ(X0)/dX tgCf 6i; d«Z(X0)/d 0 i(gr
На основе шести вышеприведенных условий (1)(6) построим аналитическую зависимость кривой как функцию X. Представим Z(X) в виде полинома порядка с неизвестными коэффициентами а( ;, i 0,5:
Z(X)a +а,Х + а2Х2 + а3Х3 +.
+ а,Хч
+
Из указанных условий имеем: f а2 - 0;
5
а
102о
хо
6Zo
х Ао
4oi
х«
7tf
Ч
15Zo
306 гяАо
и следовательно,
авы
лж 55
Для промежуточной рамы аналитическая зависимость строится таким же образам, но с той лишь разницей,
что X и ZQ выбираются меньшими пс сравнению с соответствующими Хс нижней рамы с тем, чтобы
и
7,ъ для
радиус кривизны сопряжения горизонтального и наклонных участков промежуточной рамы был меньше радиуса кривизны сопряжения горизонтального и наклонных участков нижней рамы.
Устройство работает следующим образом.
При малых продольных воздействиях промежуточная рама 3 своей горизон - тальной гранью 5 перемещается по горизонтальной грани 8 нижней опорной рамы 7. В случае возникновения значительных продольных воздействий (в частности, при маневрово-горочных операциях) промежуточная рама 3 своей сопрягающей цилиндрической поверхностью 4 войдет в контакт с сопрягающей цилиндрической поверхностью 10 нижней рамы 7. При этом взаимодействие этих цилиндрических поверхностей произойдет без соударения, плавно, так как их очертание выбиралось из условия равенства нулю инерционных воздействий в точке сопряжения А как для горизонтального участка, так и для кривой сопряжения (условие 3). По мере увеличения взаимных смещений промежуточной 3 и нижней 7 рам, движение по сопрягающим участкам закончится и начнется взаимодействие наклонных граней 6 и 9. Переход от движения по цилиндрическим поверхностям к-движению по наклонным граням также происходит плавно, без разрыва производных вплоть до второго порядка включительно, что следует из условий нахождения аналитической зависимости сопрягающей кривой в точке В.
1 По окончании процесса плавного гашения ударного импульса заканчивается подъем груза 12 и подвижная вер няя рама 1 под действием массы перевозимого груза 12 возвращается в исходное положение, что обеспечивает готовность устройства к работе при новых соударениях вагонов.
Формула изобретения
1. Турникет, содержащий жестко закрепленную на платформе нижнюю ра- му, верхняя поверхность которой в вертикальной продольной плоскости выполнена с наклонными друг к другу участками, сопряженными с горизонтальным участком, промежуточную
O раму, нижняя поверхность которой
выполнена с наклонными и горизонтальными участками для взаимодействия с верхней поверхностью нижней рамы, и верхнюю раму для размещения груза,
5 соединенную с промежуточной рамой шкворнем, отличающийся тем, что, с целью повышения сохранности перевозимого груза путем обеспечения плавного демпфирования продольных инерционных нагрузок, сопряжение между горизонтальным и наклонными участками соответствующих поверхностей нижней и промежуточной рам выполнено в виде цилиндрических по5 верхностей с поперечно расположенной горизонтальной образующей и расположенной в вертикальной продольной плоскости направляющей, описываемой следующим уравнением:
0
30
Z(X) аХ3 +
cXJ
5
0
5
0
10Zo Ч
где а -г
, 7
b хГ 6Zo
404 .
уГ
хо
; Zr i Ао
3
С ХГ ХТ 06 - тангенс угла наклона участков нижней н промежуточной рам-;
X 0 - величина проекции сопрягающей кривой на ось ОХ; Z 0 - величина проекции сопрягающей кривой на ось OZ. 2. Турникет поп.1,отличаю- щ и и с я тем, что радиус кривизны сопрягающей цилиндрической поверхности промежуточной рамы меньше радиуса кривизны сопрягающей цилиндрической поверхности нижней рамы в каждой точке контакта указанных поверхностей.
1 12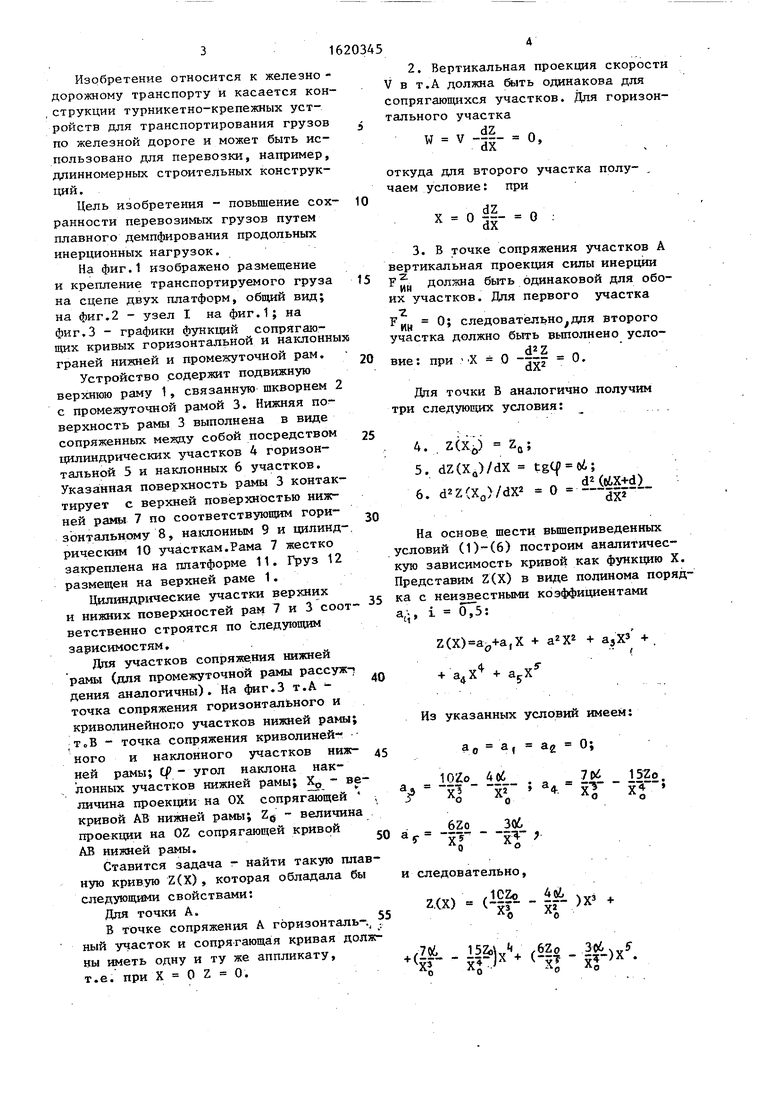
| название | год | авторы | номер документа |
|---|---|---|---|
| Турникет для перевозки длинномерных грузов | 1986 |
|
SU1418123A1 |
| Турникет для закрепления длинномерных грузов на транспортном средстве | 1985 |
|
SU1299860A1 |
| Турникетная опора | 1989 |
|
SU1701584A1 |
| Турникет для транспортирования длинномерных грузов | 1984 |
|
SU1174296A1 |
| Устройство для крепления длинномерных грузов на сцепе железнодорожных платформ | 1980 |
|
SU925704A1 |
| Турникет для транспортирования длинномерных грузов на сцепе железнодорожных платформ | 1970 |
|
SU569470A1 |
| СОПРЯЖЕНИЕ КУЗОВА ЛОКОМОТИВА С ТЕЛЕЖКОЙ | 1967 |
|
SU222442A1 |
| Турникетная опора для крепления длинномерных грузов | 1990 |
|
SU1782812A1 |
| Устройство для крепления длинномерных грузов на сцепе железнодорожных платформ | 1985 |
|
SU1298110A1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2123947C1 |
Изобретение относится к железнодорожному транспорту и касается конструкции турникетно-крепежных устройств для транспортирования грузов по железной дороге и может быть использовано для перевозки, например, длинномерных строительных конструкций. Цель изобретения - повышение сохранности перевозимых грузов путем плавного демпфирования продольных инерционных нагрузок. Турникет содержит верхнюю 1, нижнюю 7 и промежуточную 3 рамы. Верхняя рама 1 соединена с промежуточной 3 шкворнем 2. Взаимодействующие верхняя поверхность рамы 7 и нижняя поверхность рамы 3 выполнены с наклонными и горизонтальными участками. Сопряжение между горизонтальными и наклонными участками нижней и промежуточной рам соответственно выполнено в виде цилиндрических поверхностей, сечение которых вертикальной продольной плоскостью является плавной кривой, описываемой уравнением. Радиус кривизны сопрягающей цилиндрической поверхности для помежуточной рамы меньше радиуса кривизны сопрягающей цилиндрической поверхности нижней опорной рамы в каждой точке контакта указанных поверхностей. 1 з.п.ф-лы, 3 ил о Ь)
ZJ
Фиа1
ZM--dJ(
z(x)ax3+6xtl+cj(s
Фиг.З
| Турникет для транспортирования длинномерных грузов на сцепе железнодорожных платформ | 1970 |
|
SU569470A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
