И юг ei ение от иск и гея ч по г. ьемно i ране по)|цом манжностро нию и предпазна н но, главным образом для IK но гь пня в 1. стеллажною крана-щ i абелс ра при двустороннем расположении стеллажей, а также в качестве neperpv зчиха тары с кон- вейера на конвейер, с конвейера на приемный стог технологического оборудования
Це гь изобретения нчгпение зкспл ir пионных арактерис. ик гнтем освобожде ния зоггы рапн.цения замкнутого гчго- вгя о ofMaiic1 гем1 игами сцепления с га- рои при pa цц пин его н гори зон алььоп ч их KOI ги
изображено захвамгос ст1
11,1 фИГ
рот i во ни i в аксонометрии, на фиг 2 вн А нч фиг 1, ил фит ,4сече, ие
2, на фит 4сечение
Ь В
Ь на фит В ча фиг 2,
ia фиг
10
положение
захватною строиства во время
э.1ем( ), ООГЫ
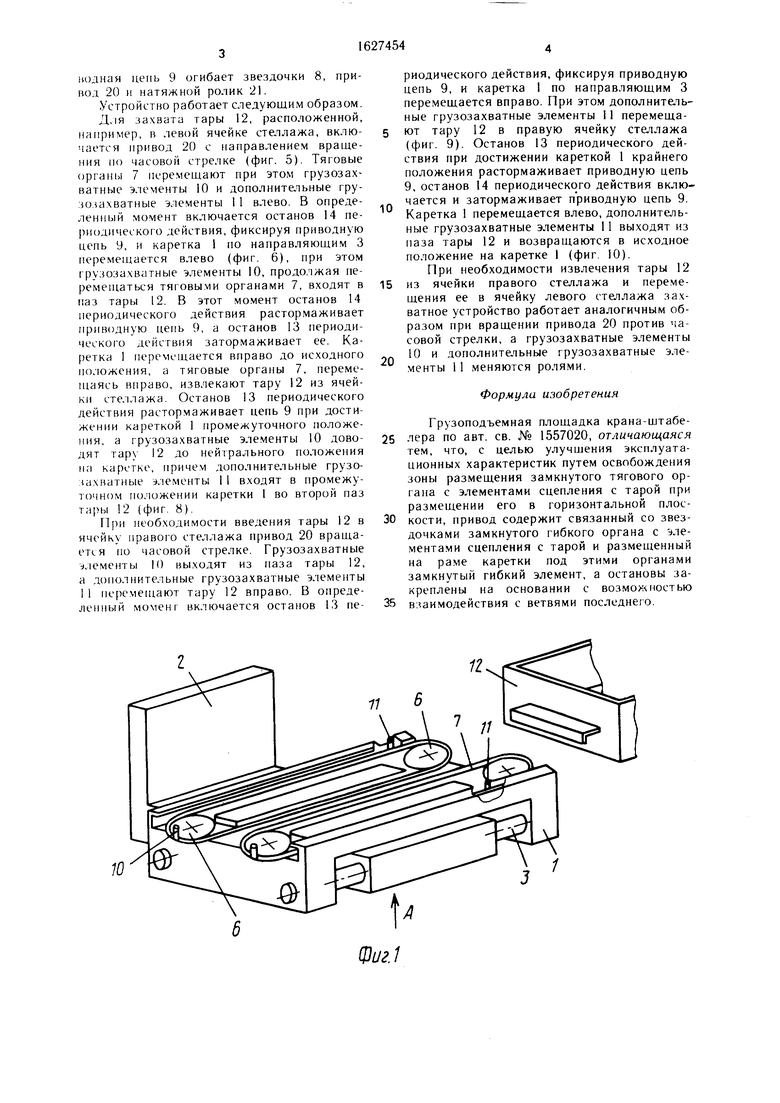
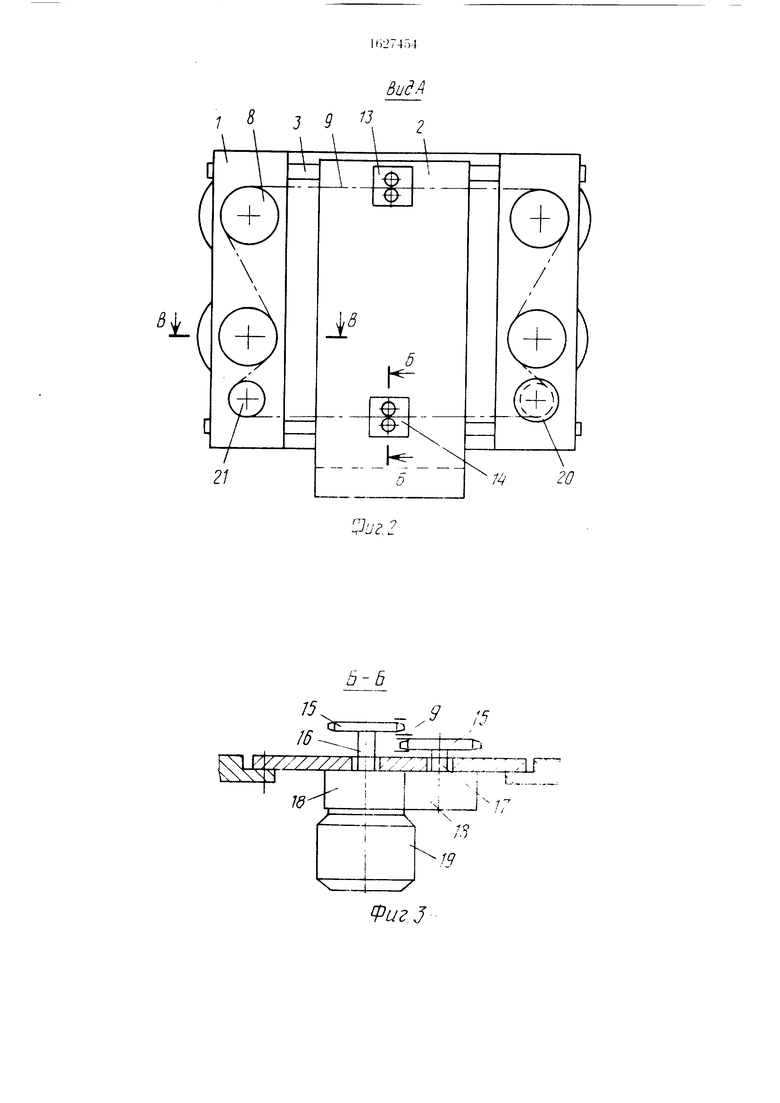
f р зопо п.омная площадка крана штабе it-jia для гарь, с пазами под rpvtosaxвагные элементы содержит карегкч I, ч та.човлектпю на гр юпод ы мнчкс } во iioci ью перемещения вдогь напраь тян) ци ,-J, закрепленных на гр юпод ьемннкс 2 На карегкс1 1 установлены подшипниковые пы i, в которых установлены оси 5, на верхних концах котор л ,акр( п.тсны двоен ные звездочки 6, огибаемые ГЯГОРЫМИ ор ганами 7 - двххряитыми це.чями, а на нижних концах осей 5 закреплены сдвоеч- ные звездочки 8, огибаемые приводной цепью 9 На тяговых 7 закреплены гр юзахватные эломегл ы П1 и дополнительные т р юзахватные элементы II, выполненные в виде пальцев, пред назначенных для захода в пазы тары 12 На грузоподъемнике 2 хетанов.тены остано вы 13 и 14 периодическою т й.твия, состоящие из звездочек 15, входящих в за цепление с приводной цепью 9 и закреп лет ных на осях 16 и 17, размещенных в подшипниювых злах 18 На о.и 11 с- тановлен электромагнитный гормо 14
О Ю
СЛ
Ј
N)
водная цепь 9 огибает звездочки 8, привод 20 и натяжной ролик 21.
Устройство работает следующим образом.
Для захвата тары 12, расположенной, например, в девой ячейке стеллажа, включается привод 20 с направлением вращения по часовой стрелке (фиг. 5). Тяговые органы 7 перемешают при этом грузозахватные элементы 10 и дополнительные гру- ш ахватные элементы 1 1 влево. В определенный момент включается останов 14 периодического действия,фиксируя приводную цепь 9, и каретка 1 по направляющим 3 перемещается влево (фиг. 6), при этом грузозахватные элементы 10, продолжая перемещаться тяговыми органами 7, входят в паз тары 12. В этот момент останов 14 периодического действия растормаживает приводную цепь 9, а останов 13 периодического действия затормаживает ее. Каретка 1 перемещается вправо до исходного положения, а тяговые органы 7, перемещаясь вправо, извлекают тару 12 из ячейки стеллажа. Останов 13 периодического действия растормаживает цепь 9 при достижении кареткой 1 промежуточного положения, а грузозахватные элементы 10 доводят тар 12 до неЙ1рального положения на карсгке, причем дополнительные грузо- (ахватные элементы 1 1 входят в промежуточном положении каретки 1 во второй паз тары 12 (фиг 8)
При необходимости введения тары 12 в ячейку правого стеллажа привод 20 вращается по часовой стрелке. Грузозахватные элементы 10 выходят из паза тары 12, а дополнительные грузозахватные элементы 11 перемещают тару 12 вправо. В определенный момен включается останов 13 пе0
5
0
риодического действия, фиксируя приводную цепь 9, и каретка I по направляющим 3 перемещается вправо. При этом дополнительные грузозахватные элементы Il перемещают тару 12 в правую ячейку стеллажа (фиг. 9). Останов 13 периодического действия при достижении кареткой 1 крайнего положения растормаживает приводную цепь 9, останов 14 периодического действия включается и затормаживает приводную цепь 9. Каретка 1 перемещается влево, дополнительные грузозахватные элементы 11 выходят из паза тары 12 и возвращаются в исходное положение на каретке 1 (фиг. 10).
При необходимости извлечения тары 12 из ячейки правого стеллажа и перемещения ее в ячейку левого стеллажа захватное устройство работает аналогичным образом при вращении привода 20 против часовой стрелки, а грузозахватные элементы 10 и дополнительные грузозахватные элементы 11 меняются ролями.
Формула изобретения
Грузоподъемная площадка крана-штабе- лера по авт. св. № 1557020, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик путем освобождения зоны размещения замкнутого тягового органа с элементами сцепления с тарой при размещении его в горизонтальной плос- кости, привод содержит связанный со звездочками замкнутого гибкого органа с элементами сцепления с тарой и размещенный на раме каретки под этими органами замкнутый гибкий элемент, а остановы закреплены на основании с возможностью взаимодействия с ветвями последнего.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1987 |
|
SU1557020A1 |
| Грузоподъемная площадка крана-штабелера | 1990 |
|
SU1773814A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1773813A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Грузоподъемная площадка крана-штабелера для поддонов с пазами под грузозахватные элементы | 1982 |
|
SU1058835A1 |
| Грузоподъемная площадка крана-штабелера | 1988 |
|
SU1569289A1 |
| Грузоподъемная платформа крана-штабелера | 1987 |
|
SU1416386A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |


CQ
Cfc
H,
Ji
ii . i ;
r -v - -, irfrf
A --: V-- t:. ---f: -tgrty..t-... f ,,
N| „J.LL fc -7
. , . CLL-bL ,
-t±i.-.±i-J 1- rfr Z
/ /лЧ
vJi/
Л.-f
/.
-
±i
iт
Фиг. 8
®иг.9
