ЙЙ.7
:т r1Л CM
r to
CSJ
Ј
v Vs c
csj
вид 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1657369A1 |
| Устройство для упаковки в пленку штучных изделий | 1981 |
|
SU952677A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| Грейферное подающее устройство | 1986 |
|
SU1412849A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
| Устройство для обработки оптических де-ТАлЕй C АСфЕРичЕСКиМи пОВЕРХНОСТяМи | 1979 |
|
SU850357A1 |
| Устройство для удаления деталей и отходов из пресса | 1981 |
|
SU1054101A1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU994286A2 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ НАПИЛЬНИКОВ | 1971 |
|
SU426735A1 |
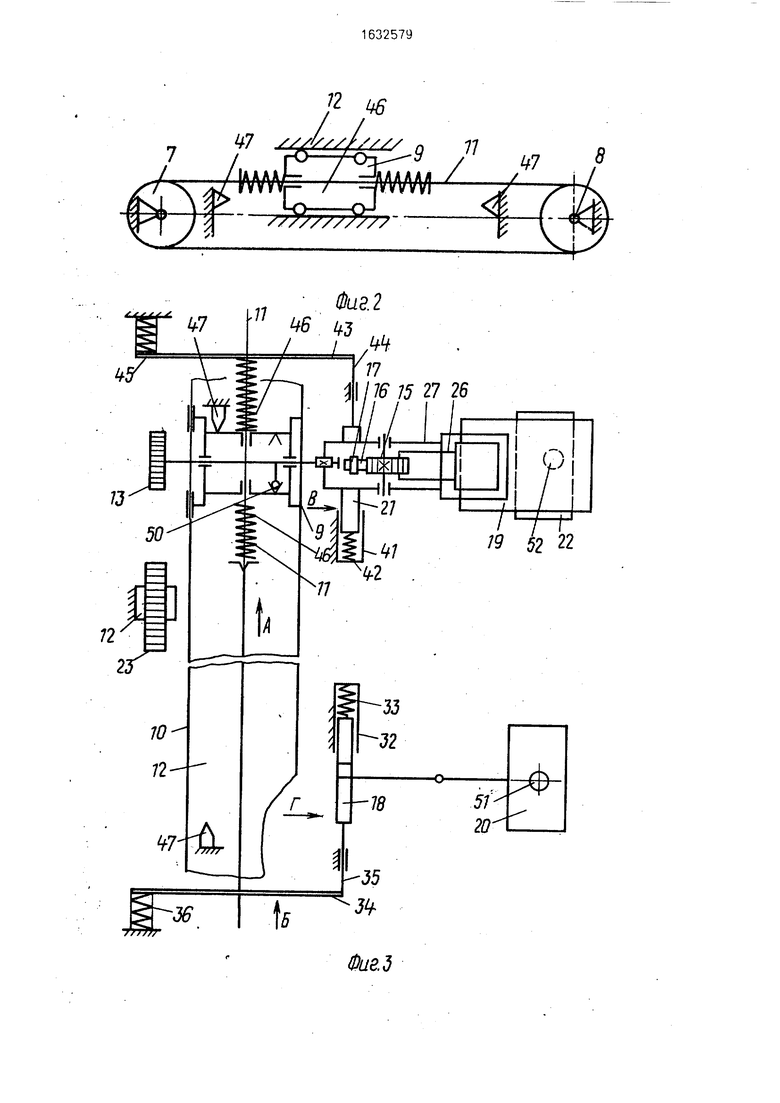
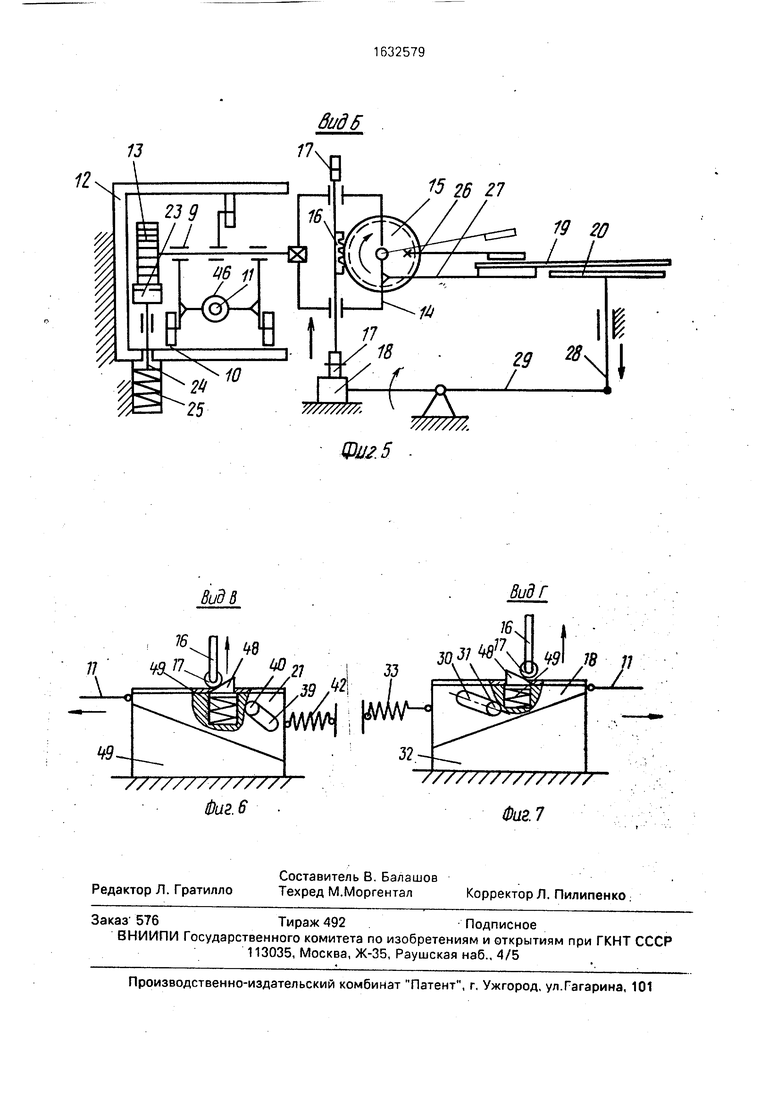
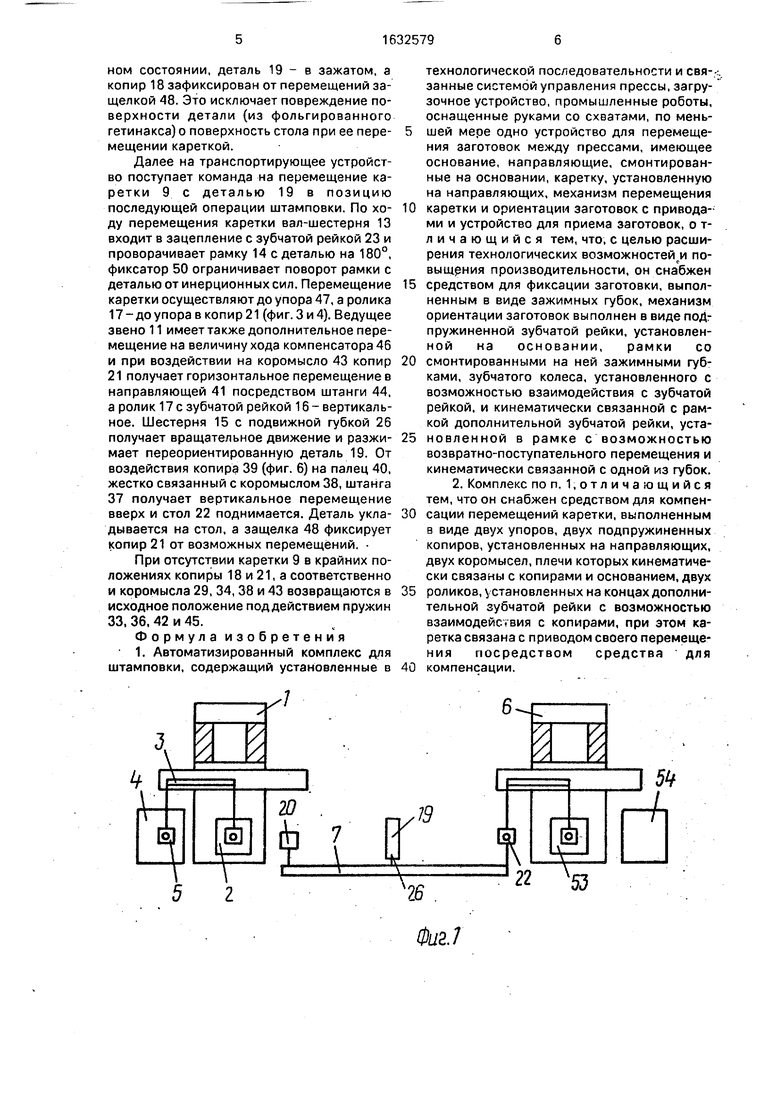
Изобретение относится к обработке металлов давлением и может быть использовано при автоматизации штамповочных производств в различных отраслях машиностроения.Цель изобретения - расширение технологических возможностей и повышение производительности. Отштампованная деталь рукой промышленного робота укладывается на стол. Каретка 9 от ведущего СР КС меваых ноние шеная лаего звена 11 перемещается на позицию захвата детали, при этом в момент контактирования вала-шестерни 13 с рейкой 23 шестерня, а соответственной рамка 14, поворачиваются на 180°. Перемещение каретки осуществляется до упора, а ролика 17 -( до упора в копир. Ведущее звено 11 имеет дополнительное перемещение на величину кода компенсатора и при воздействии на коромысло копир получает горизонтальное перемещение, а ролик 17 с зубчатой рейкой 16 - вертикальное. Шестерня 15, воздействуя на подвижную губку, прижимает деталь 19 к нижней неподвижной губке 27. Штанга получает вертикальное перемещение вниз, и стол опускается. Далее поступает команда на перемещение каретки 9 с деталью 19 в позицию последней операции. 1 з.п.ф-лы,7ил. вод А И
у/////////.
Щиг.5
Вид 8
Ч| I w
W ,
ТМ, Г V,f if .7
№
tf 26 27
у///////,.
Вид Г
у, Я К
16 ,77
W JB 11
| Автоматизированный комплекс для штамповки | 1981 |
|
SU997924A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
