Изобретение относится к машиностроению и может быть использовано в качестве импульсного привода
Цель изобретения - расширение кинематических возможностей путем получения дробных угловых шагов импульсов.
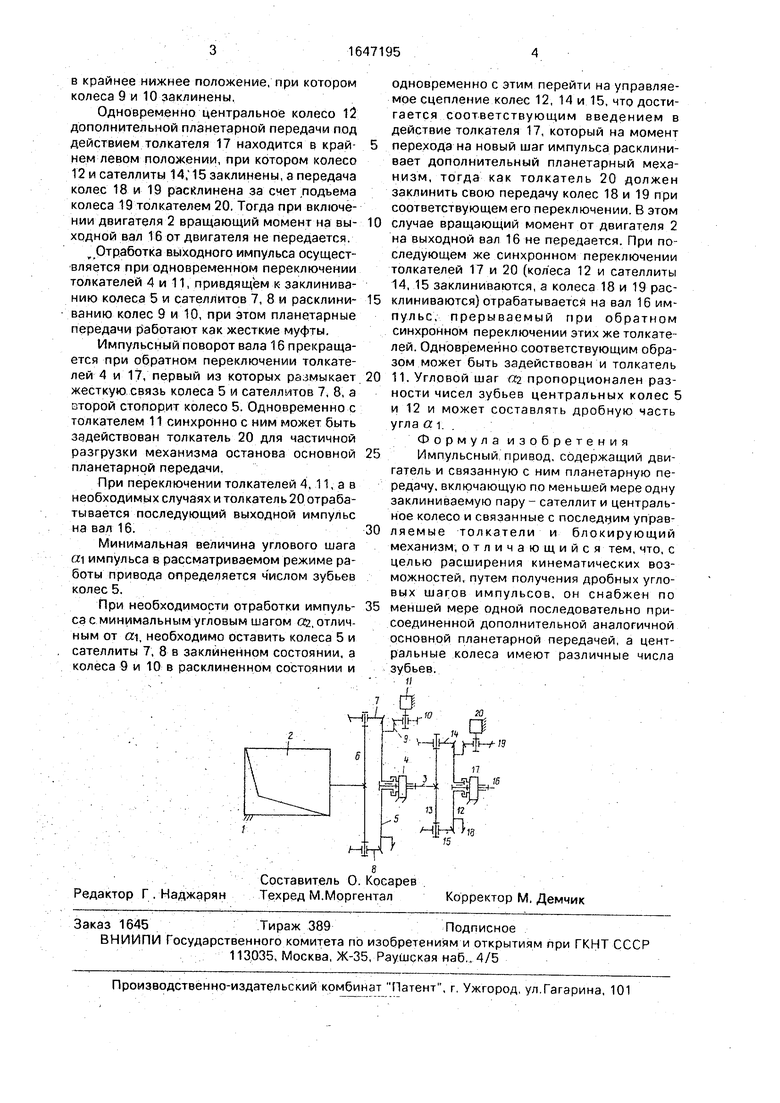
На чертеже приведена кинематическая схема импульсного привода.
Привод содержит корпус 1,. двигатель 2, центральный вал 3, управляемый толкатель 4 основной планетарной передачи, составленной из центрального конического колеса 5, установленного ни валу 3 на скользящей шпонке и взаимодействующего с толкателем 4, водило 6 с сателлитами 7 и 8, взаимодействующими с колесом 5, блокирующий механизм селективного останова колеса 5 в виде рядной передачи конических колес 9 и 10, первое из которых соосно скреплено с этим колесом, а второе установлено на управляемом толкателе 11, и аналогичную
первой планетарной передаче дополнительную передачу, включающую центральное коническое колесо 12, закрепленное на валу водило 13 с сателлитами 14 и 15, при этом центральное коническое колесо 12 установлено на шпонке на центральном валу 16 и связанос толкателем 17 и своим блокирующим механизмом, включающим соосно связанное с колесом 12 колесо 18 и взаимодействующее с ним колесо 19, установленное на толкателе 20. Числа зубьев центральных колес 5 и 12 различны.
Импульсный привод работает следующим образом.
В исходном состоянии при выключенном двигателе 2 центральное колесо 5 основной планетарной передачи отведено толкателем 4 в крайнее правое положение, соответствующее геометрически правильному зацеплению этого колеса с сателлитами 7 и 8, а колесо 10 отведено толкателем 11
О
N XS
ю ел
в крайнее нижнее положение, при котором колеса 9 и 10 заклинены,
Одновременно центральное колесо 12 дополнительной планетарной передачи под действием толкателя 17 находится в край- нем левом положении, при котором колесо 12 и сателлиты 14; 15 заклинены, а передача колес 18 и 19 расклинена за счет подъема колеса 19 толкателем 20. Тогда при включении двигателя 2 вращающий момент на вы- ходной вал 16 от двигателя не передается. г Отработка выходного импульса осуществляется при одновременном переключении толкателей 4 и 11, привдящем к заклиниванию колеса 5 и сателлитов 7, 8 и расклини- ванию колес 9 и 10, при этом планетарные передачи работают как жесткие муфты.
Импульсный поворот вала 16 прекращается при обратном переключении толкателей 4 и 17, первый из которых размыкает жесткую связь колеса Ъ и сателлитов 7, 8, а зторой стопорит колесо 5. Одновременно с толкателем 11 синхронно с ним может быть задействован толкатель 20 для частичной разгрузки механизма останова основной планетарной передачи.
При переключении толкателей 4, 11, а в необходимых случаях и толкатель 20 отрабатывается последующий выходной импульс на вал 16.
Минимальная величина углового шага а импульса в рассматриваемом режиме работы привода определяется ч ислом зубьев колес 5.
При необходимости отработки импуль- са с минимальным угловым шагом az. отличным от ai, необходимо оставить колеса 5 и сателлиты 7, 8 в заклиненном состоянии, а колеса 9 и 10 в расклиненном состоянии и
одновременно с этим перейти на управляемое сцепление колес 12, 14 и 15, что достигается соответствующим введением в действие толкателя 17, который на момент перехода на новый шаг импульса расклинивает дополнительный планетарный механизм, тогда как толкатель 20 должен заклинить свою передачу колес 18 и 19 при соответствующем его переключении. В этом случае вращающий момент от двигателя 2 на выходной вал 16 не передается. При последующем же синхронном переключении толкателей 17 и 20 (колеса 12 и сателлиты 14, 15 заклиниваются, а колеса 18 и 19 расклиниваются) отрабатывается на вал 16 импульс, прерываемый при обратном синхронном переключении этих же толкателей. Одновременно соответствующим образом может быть задействован и толкатель 11. Угловой шаг а.2 пропорционален разности чисел зубьев центральных колес 5 и 12 и может составлять дробную часть угла a 1.
Формула изобретения Импульсный привод, содержащий двигатель и связанную с ним планетарную передачу, включающую по меньшей мере одну заклиниваемую пару - сателлит и центральное колесо и связанные с последним управляемые толкатели и блокирующий механизм, отличающийся тем, что, с целью расширения кинематических возможностей, путем получения дробных угловых шагов импульсов, он снабжен по меншей мере одной последовательно присоединенной дополнительной аналогичной основной планетарной передачей, а центральные колеса имеют различные числа зубьев.
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный привод | 1988 |
|
SU1647194A2 |
| Импульсный привод | 1988 |
|
SU1642149A2 |
| Импульсный привод | 1988 |
|
SU1504444A2 |
| ИМПУЛЬСНЫЙ ПРИВОД | 1991 |
|
RU2022185C1 |
| Импульсный привод Б.И.Явича | 1985 |
|
SU1293432A1 |
| Импульсный привод | 1988 |
|
SU1587270A2 |
| Импульсный привод | 1990 |
|
SU1721342A2 |
| Импульсный привод | 1988 |
|
SU1573276A2 |
| Импульсный привод | 1986 |
|
SU1379543A2 |
| Импульсный привод | 1986 |
|
SU1446399A1 |
Изобретение относится к машиностроению С целью расширения кинематических возможностей путем получения дробных угловых шагов импульсов, обработка выходного импульса осуществляется при одновременном переключении толкателей 4 и 11, приводящем к заклиниванию колеса 5 и сателлитов 7 и 8 и расклиниванию колес 9 и 10. Импульсный поворот вала 16 прекращается при обратном переключении толкателей 4 и 11, первый из которых размыкает колесо 5 и сателлиты 7 и 8, а второй блокирует колесо 5. Аналогичным образом осуществляется дополнительный импульсный поворот вала 16 при переключении толкателей 17 и 20 дополнительной планетарной передачи. Вследствие того что число зубьев колес 5 и 12 различно, суммарный импульсный поворот вала 16 может быть некратным числу зубьев колеса 5. 1 ил
J-f ..A ,-10
0
| Импульсный привод Б.И.Явича | 1988 |
|
SU1548560A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
