Изобретение относится к грузоподъемной технике и может быть использовано для захвата и транспортировки грузов с фигурной головкой.
Цель изобретения - уменьшение габаритов и металлоемкости захвата.
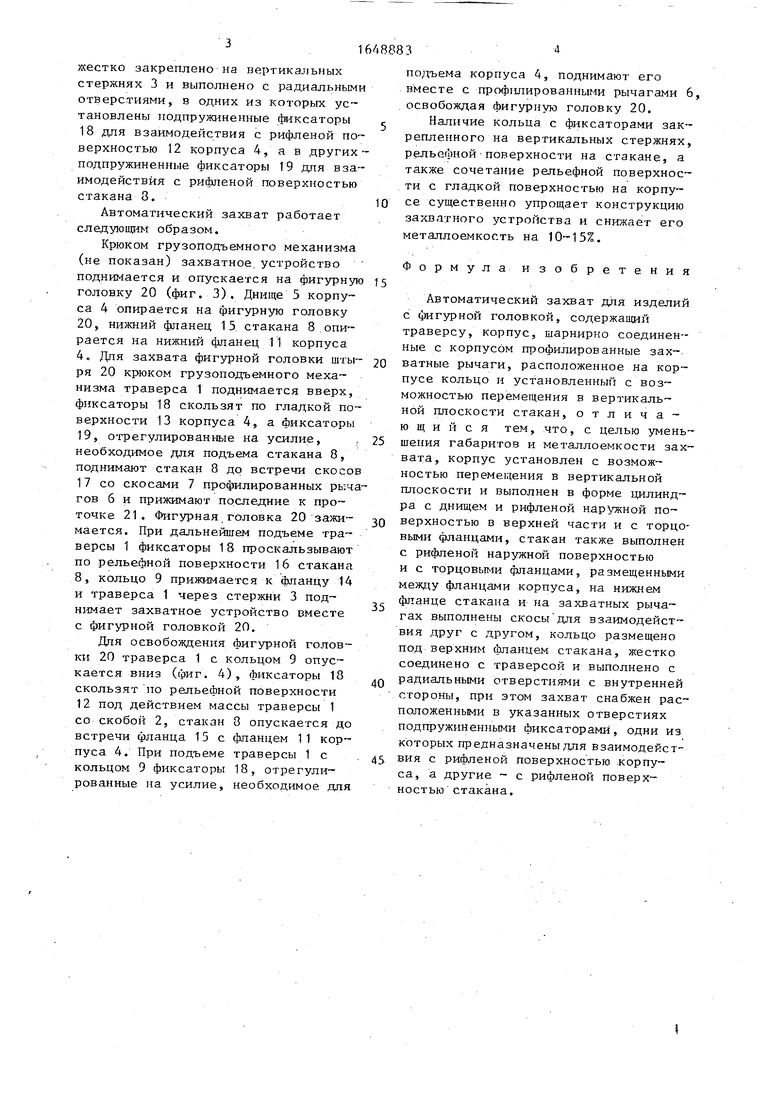
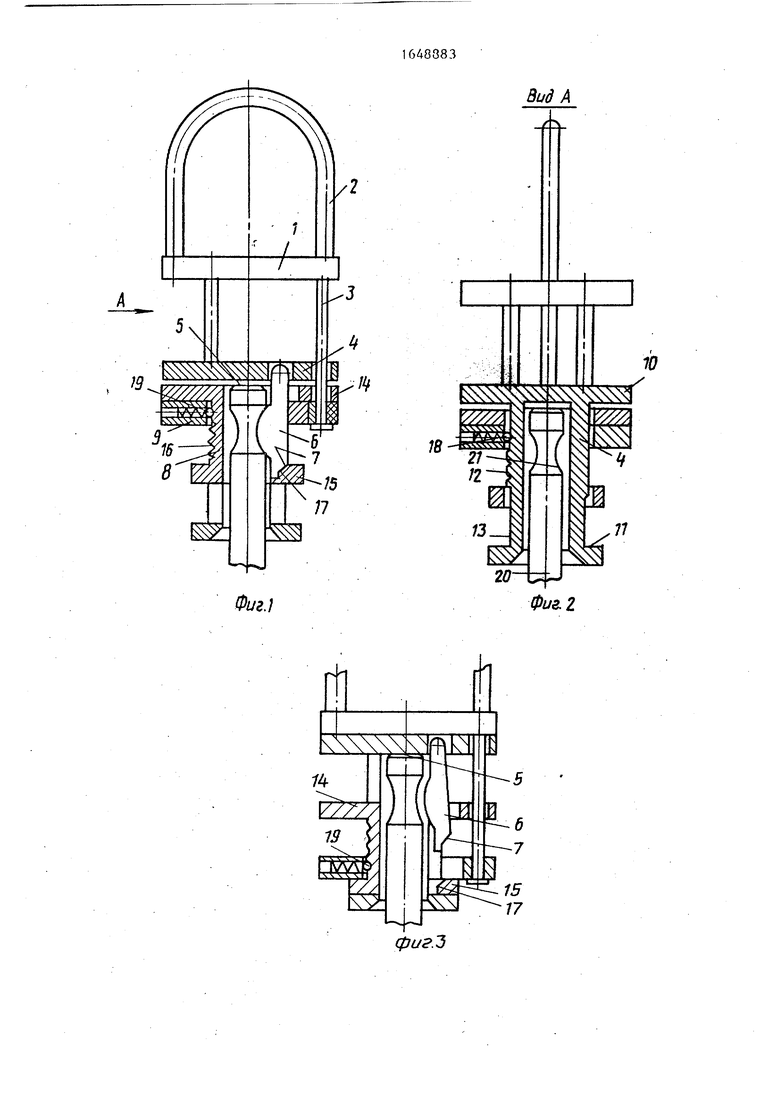
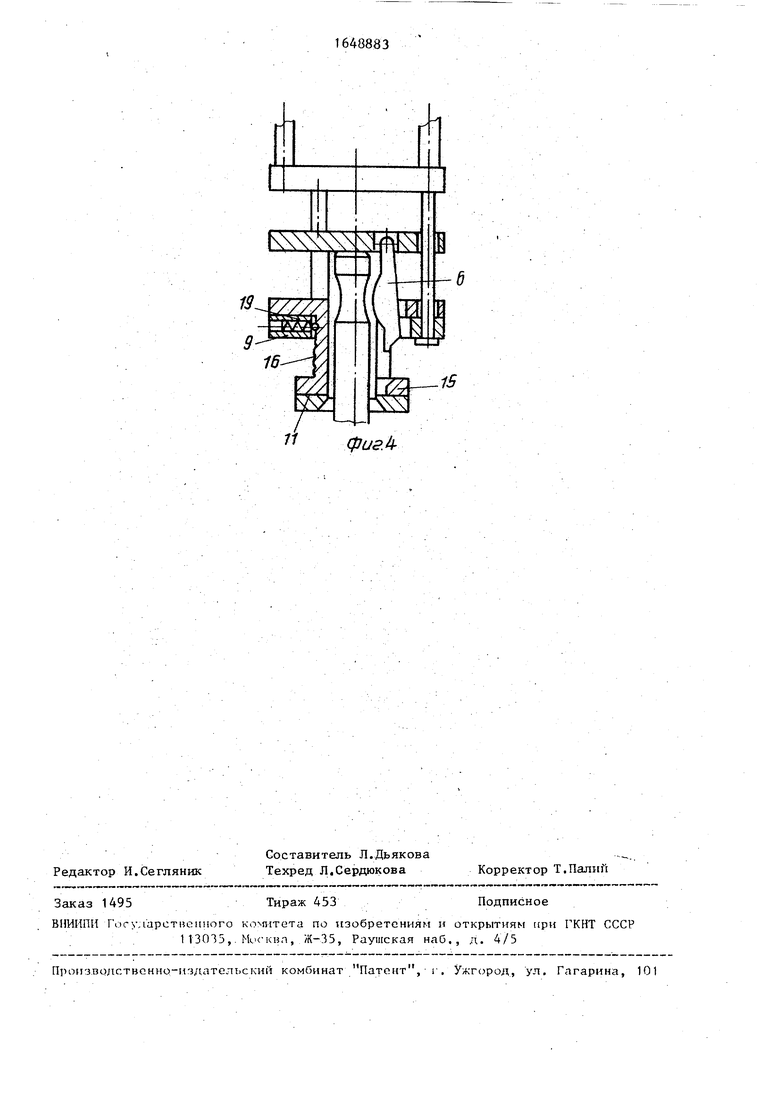
На фиг. 1 показан общий вид автоматического захвата; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - захват в момент установки его на фигурную головку груза; на фиг. 4 - то же, в момент снятия его с фигурной головки.
Автоматический захват содержит траверсу 1 со скобой 2, вертикальные, стержни 3, корпус 4, выполненный в форме цилиндра с днищем 5, шарнирно установленные на корпусе 4 профилированные захватные рычаги 6 со скосами 7, стакан 8 и кольцо 9. Корпус 4 выполнен с торцовыми фланцами 10 и 11 и с рифленой наружной поверхностью 12 в верхней части и гладкой 13 в нижней. Стакан 8 также выполнен с торцовыми фланцами 14 и. 15, размещенными между Фланцами корпуса 4 и с рифленой наружной поверхностью 16. На нижнем торце 15 стакана 8 выполнены скосы 17 для взаимодействия со скосами 7 на профилированных рычагах 6. Кольцо 9 расположено между торцовыми фланцами 14 и 15 стакана .8,
00 ЭО 30
го
жестко закреплено на вертикальных стержнях 3 и выполнено с радиальными отверстиями, в одних из которых установлены подпружиненные фиксаторы 18 для взаимодействия с рифленой поверхностью 12 корпуса 4, а в других- подпружиненные фиксаторы 19 для взаимодействия с рифленой поверхностью стакана 8.
Автоматический захват работает следующим образом.
Крюком грузоподъемного механизма (не показан) захватное устройство поднимается и опускается на фигурную головку 20 (фиг. 3). Днище 5 корпуса 4 опирается на фигурную головку 20, нижний фланец 15 стакана 8 опи рается на нижний фланец 11 корпуса 4. Для захвата фигурной головки шты ря 20 крюком грузоподъемного механизма траверса 1 поднимается вверх, фиксаторы 18 скользят по гладкой поверхности 13 корпуса 4, а фиксаторы 19, отрегулированные на усилие, , необходимое для подъема стакана 8, поднимают стакан 8 до встречи скосов 17 со скосами 7 профилированных рычагов б и прижимают последние к проточке 21. Фигурная головка 20 зажимается. При дальнейшем подъеме траверсы 1 фиксаторы 18 проскальзывают по рельефной поверхности 16 стакана 8, кольцо 9 прижимается к Фланцу 14 и траверса 1 через стержни 3 поднимает захватное устройство вместе с фигурной головкой 20.
Для освобождения фигурной головки 20 траверса 1 с кольцом 9 опускается вниз (фиг. 4), фиксаторы 18 скользят по рельефной поверхности 12 под действием массы траверсы 1 со скобой 2, стакан 8 опускается до встречи фланца 15 с фланцем 11 корпуса 4. При подъеме траверсы 1 с кольцом 9 фиксаторы 18, отрегулированные на усилие, необходимое для
-
0 5
5
0
5
0
подъема корпуса 4, поднимают его вместе с профилированными рычагами 6, освобождая фигурную головку 20.
Наличие кольца с фиксаторами закрепленного на вертикальных стержнях, рельефной поверхности на стакане, а также сочетание рельефной поверхности с гладкой поверхностью на корпусе существенно упрощает конструкцию захватного устройства и снижает его металлоемкость на 10-15%.
Формула изобретения
Автоматический захват для изделий с фигурной головкой, содержащий траверсу, корпус, шарнир ю соединенные с корпусом профилированные захватные рычаги, расположенное на корпусе кольцо и установленный с возможностью перемещения в вертикальной плоскости стакан, отличающийся тем, что, с целью уменьшения габаритов и металлоемкости захвата, корпус установлен с возможностью перемещения в вертикальной плоскости и выполнен в форме цилиндра с днищем и рифленой наружной поверхностью в верхней части и с торцовыми фланцами, стакан также выполнен с рифленой наружной поверхностью и с торцовыми фланцами, размещенными между фланцами корпуса, на нижнем фланце стакана и на захватных рычагах выполнены скосы для взаимодействия друг с другом, кольцо размещено под верхним фланцем стакана, жестко соединено с траверсой и выполнено с радиальными отверстиями с внутренней стороны, при этом захват снабжен расположенными в указанных отверстиях подпружиненными фиксаторами, одни из которых предназначены для взаимодействия с рифленой поверхностью корпуса, а другие - с рифленой поверхностью стакана.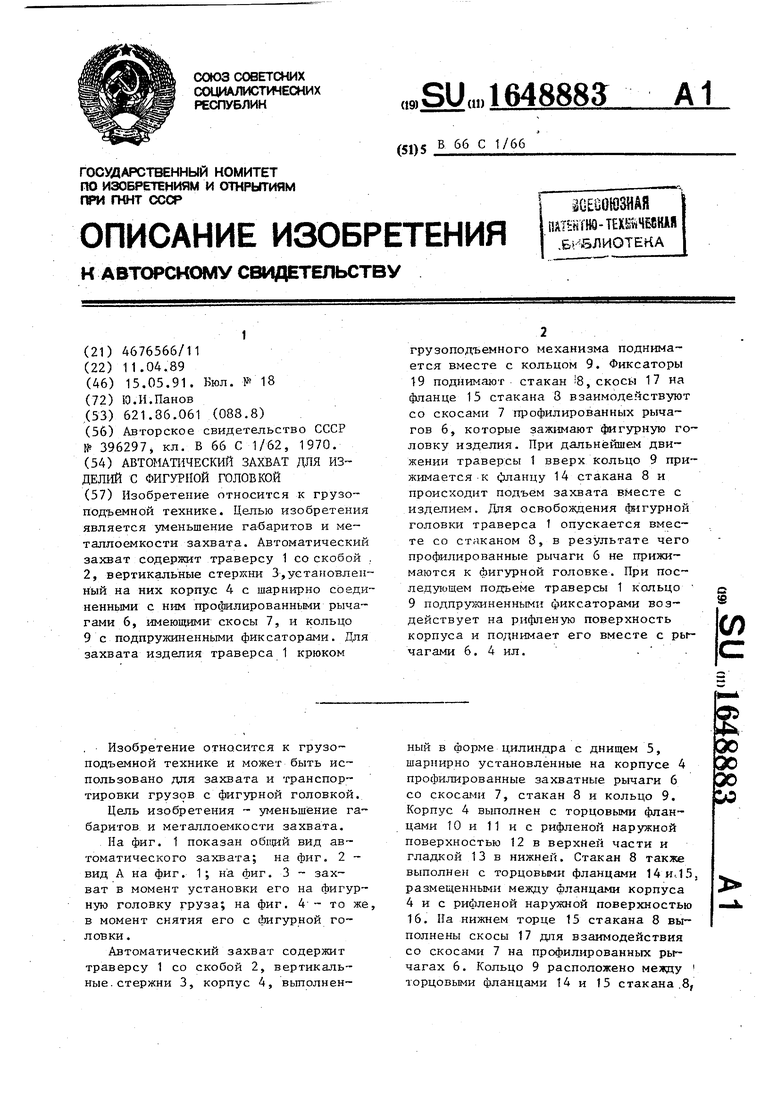
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с грибовидной головкой | 1975 |
|
SU673589A1 |
| Захват-кантователь для цилиндрических грузов | 1978 |
|
SU919972A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| Механизм фиксации захватного устройства | 1983 |
|
SU1105439A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЗАХВАТ С.В.КОЛУПАЕВА | 1992 |
|
RU2068387C1 |
Изобретение относится к грузоподъемной технике. Целью изобретения является уменьшение габаритов и металлоемкости захвата. Автоматический захват содержит траверсу 1 со скобой . 2, вертикальные стержни 3,установленный на них корпус 4 с шарнирно соединенными с ним профилированными рычагами 6, имеющими скосы 7, и кольцо 9 с подпружиненными фиксаторами. Для захвата изделия траверса 1 крюком грузоподъемного механизма поднимается вместе с кольцом 9. Фиксаторы 19 поднимают стакан 18, скосы 17 на фланце 15 стакана 3 взаимодействуют со скосами 7 профилированных рычагов 6, которые зажимают фигурную головку изделия. При дальнейшем движении траверсы 1 вверх кольцо 9 прижимается к фланцу 14 стакана 8 и происходит подъем захвата вместе с изделием. Для освобождения фигурной головки траверса 1 опускается вместе со стаканом 8, в результате чего профилированные рычаги 6 не прижимаются к йигурной головке. При последующем подъеме траверсы 1 кольцо 9 подпружиненными фиксаторами воздействует на рифленую поверхность корпуса и поднимает его вместе с рычагами 6. 4 ил. о SS (Л С
U
V W
E888V91
1 гпф
fl
фиг А
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ИЗДЕЛИЙ С ФИГУРНЫМ | 0 |
|
SU396297A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
