Изобретение относится к робототехнике, в частности к конструкциям схватов промышленных роботов и манипуляторов с возвратно-поступательным перемещением зажимных элементов,
Цель изобретения - уменьшение габаритов и улучшение удобства в эксплуатации.
На чертеже изображено захватное устройство, общий вид.
Захватное устройство состоит из корпуса 1, зажимных губок 2 и 3, снабженных приводом их возвратно-поступательного перемещения, включающим кинематическую связь с электродвигателем 4, выполненную в виде винта 5 с разнонаправленной резьбой, на которой установлены гайки 6 и 7, каждая из которых жестко связана с одной из губок, вала 8, несущего двустороннюю муфту 9, полумуфты 10 и 11 и шестерню 12. Одна из полумуфт 10 находится в зацеплении с кинематической цепью вращения гаек 6 и 7, а другая полумуфта 11 имеет возможность подключения к кинематической цепи вращения винта 5 через шестерню 13, жестко закрепленную на валу 8. Полумуфта 10 связана с электродвигателем кинематической цепью посредством шестерен 14-16 и взаимодействует с тормозом 17. Двусторонняя муфта свободно установлена на валу 8 и поджата к полумуфте 10 пружиной (не показана),
Перемещение губок может происходить в двух режимах: быстрого подвода к изделию с малым усилием зажима и медленного перемещения с большим усилием зажима (дожим изделия губками).
Захватное устройство работает следующим образом.
Вращение от электродвигателя 4 передается через шестерни 14--16муфте 9, представляющей собой тоже шестерню, которая через кулачки правого торца приводит во вращение полумуфту 10, выполненную в виде шестерни, а вместе с ней и вал 8 с шестерней 12, При этом винт 5 неподвижен, так как шестерня 13 удерживается от вращения тормозом 17, и находящаяся в зацеплении с ней полумуфта 11, которая свободно сидит на валу 8, также неподвижна. Гайки 6 и 7, представляющие собой тоже шестерни, получая вращение от полумуфты 10 и шестерни 12 соответственна, перемещаются навстречу одна другой вдоль неподвижного
винта 5 вместе с губками 2 и 3. Происходит быстрый подвод n/бок к изделию.
После того, как губки 2 и 3 соприкоснутся с изделием, гайки 6 и 7 и соответственно полумуфта 10, шестерня 12 и вал 8 останавливаются. При этом кулачки муфты 9, которая продолжает вращаться, начинают смещаться относительно кулачков неподвижной полумуфты 11. Муфта 9
смещается влево на валу 8 и кулачки ее левого торца входят в зацепление с кулачками полумуфты 11. Так как высота кулачков правого торца больше высоты кулачкоз левого торца, при смещении влево муфта 9
оказывается сопряженной с полумуфтами 10 и 11 одновременно. Полумуфта 11 приводится во вращение и, преодолевая сопротивление тормоза 17, вращает шестерню 13 и жестко связанный с ней винт 5. Передаточное, отношение между полумуфтой 11 и шестерней 13 меньше единицы, а передаточное отношение между полумуфтой 10 и гайкой 5, шестерней 12 и гайкой 7 равно единице. Суммарное перемещение губок 2
и 3 при зажиме изделия определяется разностью чисел оборотов винта и гайки, которые представляют собой дифференциальную пару. В результате происходит дожим изделия в губках - при малом перемещении губок с большим усилием, обеспечивающим надежный зажим изделия.
Формула изобретения Захватное устройство, содержащее
корпус, зажимные губки, снабженные приводом их возвратно-поступательного перемещения, включающим кинематическую связь с элею родвигателем, отличающееся тем, что, с целью уменьшения габаритов и улучшения удобства в эксплуатации, кинематическая связь выпопнена в виде винта с разнонаправленной резьбой, на которой установлены гзйки, каждая из которых жестко связана с одной из губок, вала
несущего двустороннюю муфту, одна из полумуфт которой находится в зацеплении с кинематической цепью вращения гаек, а другая имеет возможность подключения к кинематической цепи вращения винта, при
этом кинематическая цепь вращения винта имеет передаточное отношение меньше передаточного отношения кинематической цепи вращения гаек.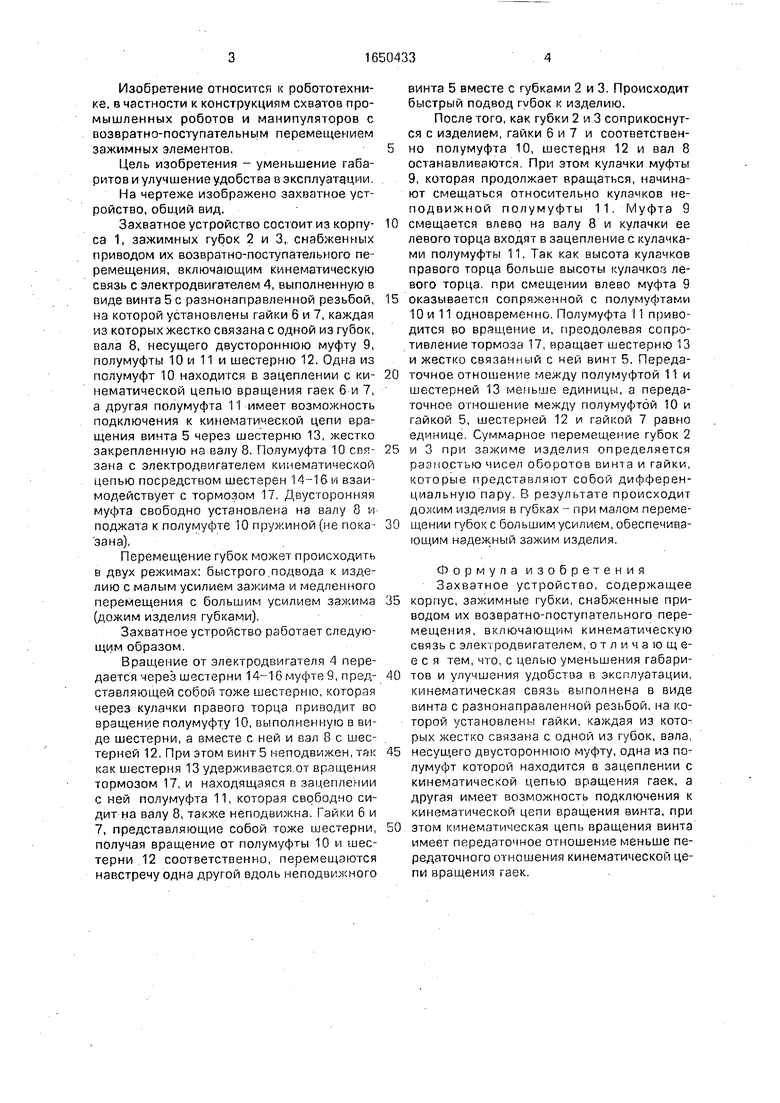
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1660955A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Манипулирующее устройство для съема, кантования и выдачи изделий с пресса | 1987 |
|
SU1512775A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Рабочая клеть прокатного стана | 1989 |
|
SU1623807A1 |
| Захватное устройство | 1989 |
|
SU1785892A1 |
| Устройство для резки глиняного бруса | 1980 |
|
SU903121A1 |
| Правильно-растяжная машина | 1975 |
|
SU566657A1 |
| ТОКАРНЫЙ САМОЦЕНТРИРУЮЩИЙ ПАТРОН | 1990 |
|
RU2018415C1 |
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1987 |
|
SU1503948A1 |
Изобретение относится к робототехнике, в частности к захватным устройствам промышленных роботов и манипуляторов с возвратно-поступательным перемещением зажимных элементов. Цель изобретения - уменьшение габаритов и улучшение удобства эксплуатации. Захватное устройство содержит корпус 1, зажимные губки 2 и 3, снабженные приводом их возвратно-постул пательного перемещения, включающим кинематическую связь с электродвигателем 4, выполненную в виде винта 5 с разнонаправленной резьбой, на котором установлены гайки 6 и 7, каждая из которых жестко связана с одной из губок, вал 8, несущий двустороннюю муфту 9, полумуфты 10 и 11, шестерню 12. Одна из полумуфт 10 находится в зацеплении с кинематической цепью вращения гаек 6 и 7, а другая полумуфта 11 имеет возможность подключения к кинематической цепи вращения винта 5 через шестерню 13, жестко закрепленную на валу. Полумуфта 10 связана с электродвигателем кинематической цепью посредством шестерен 14-16. Полумуфта 10 взаимодействуете тормозом 17. Перемещение губок 2 и 3 может происходит в двух режимах: быстрого подвода к изделию и медленного перемещения (дожим изделия губками). 1 ил. / // //. (Л С ON СЛ g 00 со
| Установка для термической резки труб прямоугольного сечения | 1985 |
|
SU1298019A1 |
