Изобретение относится к робототехнике.
Известно захватное устройство, содержащее зажимные губки, кинематически связанные посредством механизма сведения губок и передаточного механизма с реверсивным приводом вращения (см. авт. св. СССР №1559865, кл. В 25 J 15/00, 1990 г.).
Недостатками известного устройства являются ограниченные технологические возможности и ограниченная надежность работы фрикционных элементов передаточного механизма.
Цель изобретения - расширение технологических возможностей и повышение надежности в работе.
Поставленная цель достигается тем, что в захватном устройстве, содержащем зажимные губки, кинематически связанные посредством механизма сведения губок и передаточного механизма с реверсивным приводом вращения, передаточный механизм выполнен в виде индукционной муфты, а полумуфты установлены с возможностью осевого перемещения одна относительно другой.
На чертеже представлена кинематическая схема захватного устройства.
Захватное устройство содержит корпус 1, реверсивный привод 2, связанный с входным звеном (прлумуфтой) индукционной муфты 3. Выходное звено (полумуфта) индукционной муфты 3 связано с червяком 4 механизма сведения губок. На связанных с червяком 4 червячных колесах 5 установлены зажимные губки 6.
Захватное.устройство работает следующим образом.
При включении привода 2 крутящий момент посредством индукционной муфты 3 передается на вал червяка 4, а с вала червяка - на червячные колеса 5. Вращение колес 5 приводит к зажиму детали закрепленными на колесах 5 губками 6. Для увеличения усилия зажатия детали необходимо увеличить частоту вращения вала привода 2. Это приведет к увеличению магнитного взаимодействия между полумуфтами магнитной муфты, увеличит вращающий момент на выходном звене муфты. Это увеличение вращающего момента преобразуется посредством вала червяка 4 и червячных колес 5 в увеличение усилия зажатия детали.
Дополнительное регулирование усилия зажатия детали можно осуществить и с помощью осевого возвратно-поступательного
движения вверх-вниз полумуфт индукционной муфты 3 относительно друг друга, например, путем перемещения вверх-вниз привода 2, жестко соединенного посредством вала с входным звеном (входной полумуфтой) магнитной муфты 3. При этом увеличивается или уменьшается зазор между ведомой и ведущей полумуфтами (или, в случае использования цилиндрической индукционной муфты, увеличивается или
уменьшается площадь рабочей поверхности взаимодействия полумуфт) и соответственно уменьшается или увеличивается вращающий момент на ведомой полумуфте, являющейся выходным звеном передаточного механизма.. Это приводит соответственно к уменьшению или увеличению усилия зажатия детали губками б,
Использование предлагаемого изобретения позволит расширить технологические
возможности захватного устройства, увеличить его надежность, а также даст возмож-. ность уменьшить издержки на переналадку оборудования. . Формула.изобретения
1, Захватное устройство, содержащее зажимные губки, кинематически связанные посредством механизма сведения губок и передаточного механизма с реверсивным приводом, отличающееся тем, что, с
целью расширения технологических возможностей и повышения надежности в работе, передаточный механизм выполнен в виде индукционной муфты.
2. Устройство по п. 1, о т л и ч а ю щ е ёс я тем, что полумуфты установлены с возможностью осевого перемещения одна относительно другой.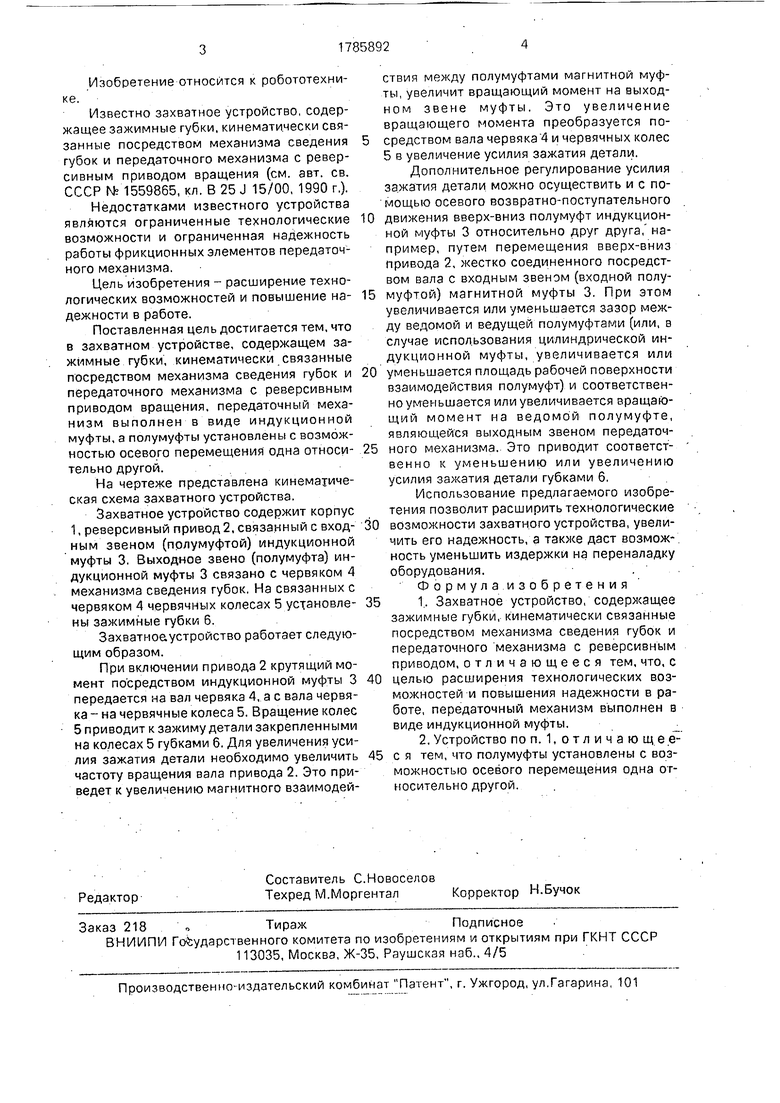
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1972 |
|
SU440249A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Механизированный привод самоцентрирующего кулачкового патрона | 1984 |
|
SU1166907A1 |
| Схват | 1983 |
|
SU1079429A1 |
| Захватное устройство | 1984 |
|
SU1293019A1 |
| Захватное устройство | 1988 |
|
SU1650433A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Схват робота | 1982 |
|
SU1024271A1 |
Использование: в манипуляторах для регулирования усилия зажатия, улучшения стабильности работы и увеличение безремонтного срока службы захватного устройства. Сущность изобретения: захватное устройство содержит корпус 1, реверсивный привод 2, связанный с входным звеном магнитной муфты 3. Выходное звено магнитной муфты 3 связано с чеврвяком 4, который придает вращение червячным колесам 5, тем самым перемещая зажимные губки 6. Регулирование усилия зажатия осуществляется путем изменения скорости вращения привода, изменением воЗдушнго зазора или длины рабочей поверхности, в зависимости от конструкции муфты. Увеличение грузоподъемности достигается путем использования активных магнитных муфт или муфт с электромагнитами, способных передавать больший крутящий момент без значительного увеличения габаритных размеров. 1 з.п. ф-лы, 1 ил. Ё
| Захватное устройство | 1988 |
|
SU1556895A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
