Изобретение относится к механизации и автоматизации листоштамповочного производства и может быть использовано для отделения листовых заготовок от стопы и подачи их в пресс.
Цель изобретения - повышение надежности за счет улучшения рабочих характеристик устройства и повышение точности позиционирования исполнительного органа, повышение долговечности.
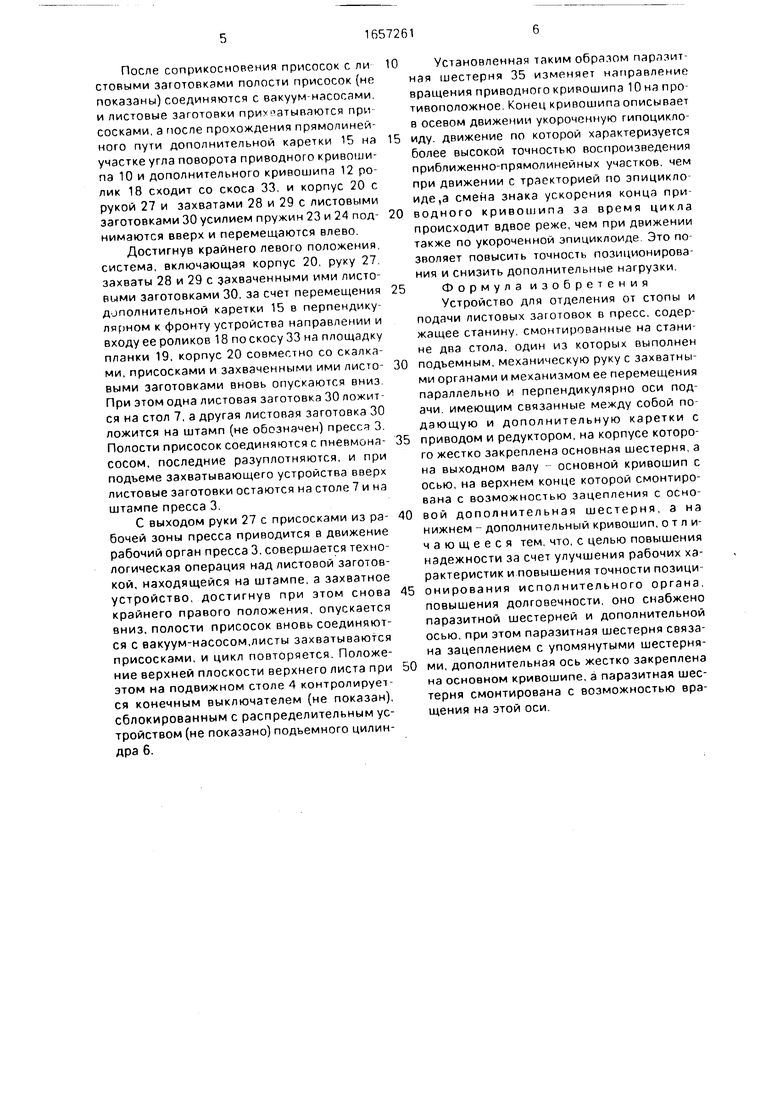
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - гипоциклоида движения исполнительного органа.
Устройство для отделения от стопы и подачи листовых заготовок в пресс содержит станину 1, установленную на фундаменте 2 или на рельсах около пресса 3. На станине 1 смонтированы подъемный стол 4, соединенный со штоком 5 цилиндра 6, и стол 7, привод (электродвигатель) 8, редуктор 9, на выходном валу которого закреплен приводной кривошип 10.
На корпусе приводного кривошипа 10 закреплена ось 11, на нижнем конце которой установлен дополнительный кривошип 12, а на верхнем -дополнительная шестерня 13. Позицией 14 показана основная шестерня, неподвижно закрепленная на корпусе редуктора 9. Дополнительный кривошип 12 своим концом установлен в отверстии дополнительной каретки 15. смонтированной в направляющих 16 подающей каретки 17.
Дополнительная каретка 15 опирается роликами 18 на копир, выполненный в ниде планки 19, соединенной с корпусом 20 со штырями 21 и 22. входящими в отверстия подающей каретки 17. Корпус 20 удерживается в горизонтальном положении пружинами 23 и 24, смонтированными на направляющих 25 и 26, жестко установленных в корпусе 20 и проходящих через подвижную каретку 17.
В корпусе 20 смонтирована механическая рука 27 с захватными органами (присосками) 28 и 29, полости которых связаны с вакуум-насосом (не показан). Захватные органы 28 и 29 удерживают заготовки 30. Подающая каретка 17 установлена на направляющих 31. Рабочая поверхность планки 19 выполнена со скосами 32 и 33. На дополнительной, неподвижной относительно приводного кривошипа 10, оси 34 смонтирована паразитная шестерня 35, кинематически связанная с основной неподвижной шестерней 14 и шестерней 13.
Устройство работает следующим образом.
Крутящий момент от электродвигателя
8или от главного привода пресса (не показано) через редукторы 9 и приводной кривошип 10 передается дополнительному
кривошипу 12 и связанной с последним шестерне 13. дополнительной каретке 15. подающей каретке 17, При вращении приводного кривошипа вокруг приводного вала редуктора
9вместе с ним вокруг этого вала вращается и 0 ось 11 дополнительного кривошипа 12. вместе с осью 11 вращается и дополнительная шестерня 13 Шестерня 13, вращаясь одновременно вокруг своей оси 11, вращает и паразитную шестерню 35. которая одновре5 менно с вращением ее вокруг неподвижной относите пьно приводного кривошип а 10 оси 34, вместе с последней совершает вращение и вокруг выходного вала редуктора 9 и обкатывается по неподвижной шестерне 14,
0 установленной на корпусе редуктора 9. То есть совершает сложное движение.
Вместес шестернями 13 и 35 совершает сложное движение и дополнительный кривошип 12, который, поворачиваясь вокруг
5 оси 11, вместе с ней вращается и вокруг оси приводного вала редуктора 9. Вместе с приводным кривошипом 10 совершает вращение и дополнительная ось 34 и совместно с паразитной шестерней 35 вокруг приводно
0 го вала редуктора 9
Благодаря такому сложному движению, конец кривошипа 12. входящий в отверстие дополнительной каретки 15.описыва ет траекторию (фиг 3). в результате чего
5 продольная каретка производит возвратно- поступательное движение с выстоями в своих крайних положениях. Время выстоя определяется скоростью вращения -приводного кривошипа 10 и передаточным отношени0 ем дополнительной подвижной шестерни 13 через паразитную шестерню 35 к основной шестерне 14 на угле поворота дополнительного кривошипа 12.
При достижении подающей кареткой 17
5 одного из крайних положений дополнительный кривошип 12 на угле ip поворота приводного кривошипа 10, совершая прямолинейное поперечное движение, перемещает в поперечном направлении и до0 полнительную каретку 15, которая, набегая своими роликами 18 на один из скосов 32 или 33 планки 19, отжимает корпус 20 вниз, а вместе с последним отжимается вниз и рука 27 с захватными 28 и 29 органами При этом при нахождении подающей каретки 17
в крайнем правом положении при опускании корпуса 20 с рукой 27 и захватными органами 28 и 29 вниз присоски соприкасаются с пистовыми заготовками 30. находящимися на по..ьемном столе 4 и на столе 7
После соприкосновения присосок с ли стовыми заготовками полости присосок (не показаны) соединяются с вакуум-насосами. и листовые заготовки прикатываются присосками, а после прохождения прямолинейного пути дополнительной каретки 15 на участке угла поворота приводного кривошипа 10 и дополнительного кривошипа 12 ролик 18 сходит со скоса 33, и корпус 20 с рукой 27 и захватами 28 и 29 с листовыми заготовками 30 усилием пружин 23 и 24 поднимаются вверх и перемещаются влево.
Достигнув крайнего левого положения, система, включающая корпус 20, руку 27 захваты 28 и 29 с захваченными ими листовыми заготовками 30, за счет перемещения дополнительной каретки 15 в перпендикулярном к фронту устройства направлении и входу ее роликов 18 по скосу 33 на площадку планки 19, корпус 20 совместно со скалками, присосками и захваченными ими листовыми заготовками вновь опускаются вниз При этом одна листовая заготовка 30 ложится на стол 7, а другая листовая заготовка 30 ложится на штамп (не обозначен) пресса 3. Полости присосок соединяются с пневмонасосом, последние разуплотняются, и при подъеме захватывающего устройства вверх листовые заготовки остаются на столе 7 и на штампе пресса 3.
С выходом руки 27 с присосками из рабочей зоны пресса приводится в движение рабочий орган пресса 3, совершается технологическая операция над листовой заготовкой, находящейся на штампе, а захватное устройство, достигнув при этом снова крайнего правого положения, опускается вниз, полости присосок вновь соединяются с вакуум-насосом,листы захватываются присосками, и цикл повторяется. Положение верхней плоскости верхнего листа при этом на подвижном столе 4 контролируется конечным выключателем (не показан), сблокированным с распределительным устройством (не показано) подьемного цилиндра 6.
Установленная таким образом паразитная шестерня 35 изменяет направление вращения приводного кривошипа 10 на противоположное. Конец кривошипа описывает в осевом движении укороченную гипоциклоиду. движение по которой характеризуется более высокой точностью воспроизведения приближенно-прямолинейных участков, чем при движении с траекторией по эпициклоиде смена знака ускорения конца приводного кривошипа за время цикла происходит вдвое реже, чем при движении также по укороченной эпициклоиде Это позволяет повысить точность позиционирования и снизить дополнительные нагрузки.
Формула изобретения
Устройство для отделения от стопы и подачи листовых заготовок в пресс, содержащее станину, смонтированные на станине два стола, один из которых выполнен
подъемным, механическую руку с захватными органами и механизмом ее перемещения параллельно и перпендикулярно оси подачи, имеющим связанные между собой подающую и дополнительную каретки с
приводом и редуктором, на корпусе которого жестко закреплена основная шестерня, а на выходном валу - основной кривошип с осью, на верхнем конце которой смонтирована с возможностью зацепления с основой дополнительная шестерня, а на нижнем - дополнительный кривошип, отличающееся тем, что, с целью повышения надежности за счет улучшения рабочих характеристик и повышения точности позиционирования исполнительного органа, повышения долговечности, оно снабжено паразитной шестерней и дополнительной осью, при этом паразитная шестерня связана зацеплением с упомянутыми шестернями, дополнительная ось жестко закреплена на основном кривошипе, а паразитная шестерня смонтирована с возможностью вращения на этой оси.
tt M 33 A.A
ч-4А i r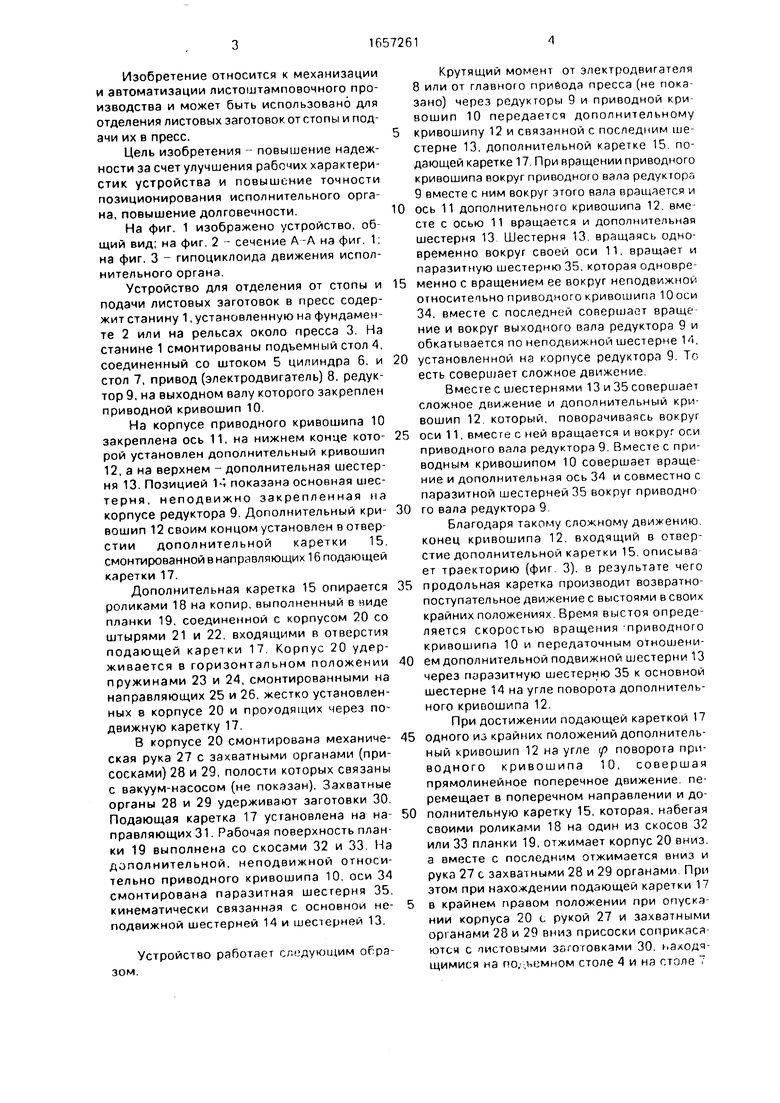
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отделения от стопы и подачи листовых заготовок в пресс | 1982 |
|
SU1013043A1 |
| Устройство для подачи заготовок в рабочую зону пресса | 1981 |
|
SU967624A1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в пресс | 1982 |
|
SU1013044A1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в зону обработки | 1982 |
|
SU1069909A1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в пресс | 1985 |
|
SU1268257A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1981 |
|
SU965566A1 |
| Устройство для подачи листовых заготовок в пресс | 1986 |
|
SU1393506A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для отделения от стопы плоской заготовки и подачи ее в пресс | 1984 |
|
SU1319980A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
Изобретение относится к механизации и автоматизации листоштамповочного производства и м.б. использовано для отделения листовых заготовок от стопы подачи их в пресс„Цель изобретения - повышение на1 12 /J 11 дежности устройства за счет улучшения рабочих характеристик и точности позициони- рования исполнительного органа и повышение долговечности. Устройство содержит смонтированный на станине 1 подъемный стол 4, кривошип 10 с приводом 8, соединенным с редуктором 9, на выходном валу которого установлен упомянутый, кривошип. На корпусе кривошипа 10 закреплена ось 11, на которой смонтирована шестерня 13, а на корпусе редуктора 9 жестко закреплено колесо 14. Между колесом 14 и шестерней 13 смонтирована паразитная шестерня 35, связанная с ними. Паразитная шестерня 35 установлена на оси, жестко закрепленной на кривошипе 10. Устройство позволяет снизить динамические нагрузки, появляющиеся в приводе кривошипа 10. 3 ил. 35 Ю 9 8 Ё О ел vj Ю Os Фие
Фиг. 2
Фиг. З
| Устройство для отделения от стопы и подачи листовых заготовок в пресс | 1982 |
|
SU1013043A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
