Изобретение относится к области автоматического управления подвижными объектами типа рельсовых реверсивных кранов-штабелеров (КШ).
Целью изобретения является повышение точности позиционирования.
На фиг. 1-3 представлена функциональная схема устройства; на фиг. 4 - включение датчиков, кривые погрешности.
Устройство для управления автоматизированной транспортно-складской системой (фиг. 1) содержит блок 1 задания координаты, блок 2 сравнения, блок 3 определения модуля, цифровой компаратор 4, блок 5 управления механизмами крана-штабелера, блок 6 определения действительной координаты, блок 7 определения направления движения, систему 8 шунтов, индуктивный датчик 9, блок 10 коррекции, блока 11 проверки точности позиционирования, датчик 12 пути торможения, блок 13 повторного
позиционирования и блок 14 определения начала торможения.
При этом блок 1 задания координаты содержит узел 15 задания адреса ячейки, выход которого соединен с входом узла 16 памяти координаты ячейки и первым выходом блока 1 задания координаты, выход узла 16 памяти координаты ячейки соединен с вторым выходом блока 1 задания координаты.
Блок 6 определения действительной координаты содержит последовательно соединенные фотоэлектрический датчик (фд) 17 перемещения крана-штабелера, узел 18 гальванической развязки, формирователь 19, узел 20 определения направления вращения фотодатчика и реверсивный счетчик 21 импульсов.
Блок 10 коррекции накопленной погрешности фотодатчика содержит первый
сл ы ы
00
элемент 22 памяти, сумматор 23 и первый элемент И 24,
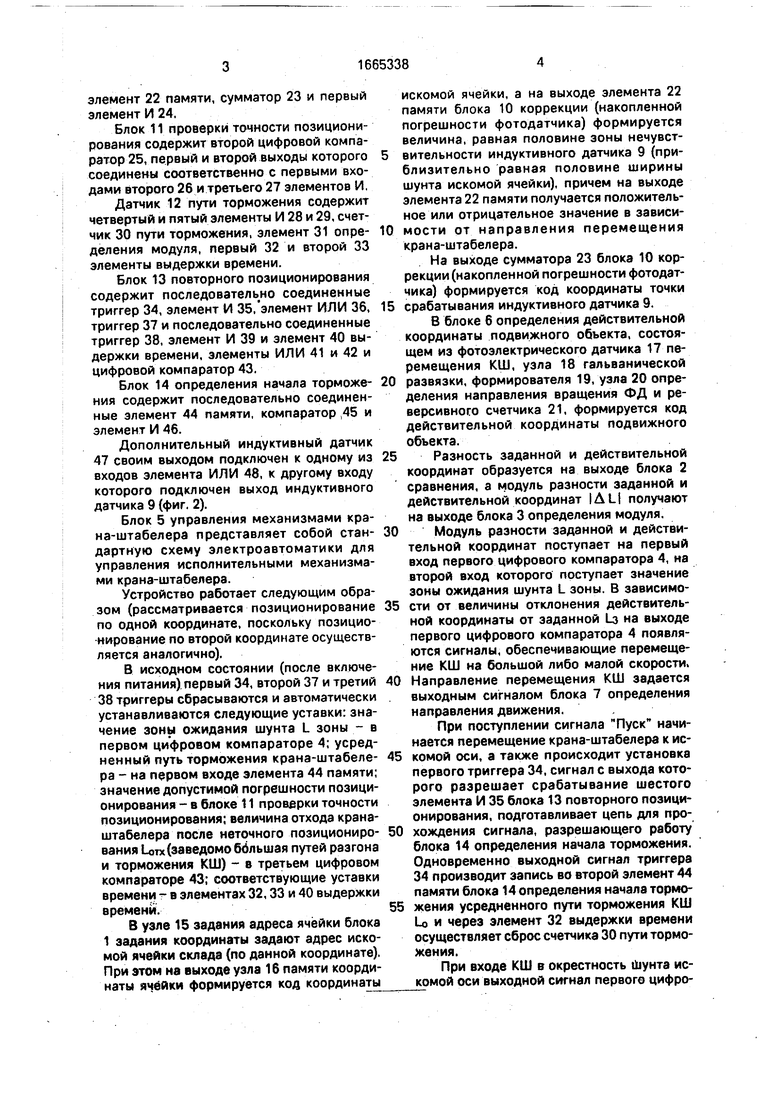
Блок 11 проверки точности позиционирования содержит второй цифровой компаратор 25, первый и второй выходы которого соединены соответственно с первыми входами второго 26 и третьего 27 элементов И.
Датчик 12 пути торможения содержит четвертый и пятый элементы И 28 и 29, счетчик 30 пути торможения, элемент 31 определения модуля, первый 32 и второй 33 элементы выдержки времени.
Блок 13 повторного позиционирования содержит последовательно соединенные триггер 34, элемент И 35, элемент ИЛИ 36, триггер 37 и последовательно соединенные триггер 38, элемент И 39 и элемент 40 выдержки времени, элементы ИЛИ 41 и 42 и цифровой компаратор 43.
Блок 14 определения начала торможения содержит последовательно соединенные элемент 44 памяти, компаратор ,45 и элемент И 46.
Дополнительный индуктивный датчик 47 своим выходом подключен к одному из входов элемента ИЛИ 48, к другому входу которого подключен выход индуктивного датчика 9 (фиг. 2).
Блок 5 управления механизмами кра- на-штабелера представляет собой стандартную схему электроавтоматики для управления исполнительными механизмами крана-штабелера.
Устройство работает следующим образом (рассматривается позиционирование по одной координате, поскольку позиционирование по второй координате осуществляется аналогично).
В исходном состоянии (после включения питания) первый 34, второй 37 и третий 38 триггеры сбрасываются и автоматически устанавливаются следующие уставки: значение зоны ожидания шунта L зоны - в первом цифровом компараторе 4; усредненный путь торможения крана-штабелера - на первом входе элемента 44 памяти; значение допустимой погрешности позиционирования - в блоке 11 проверки точности позиционирования; величина отхода крана- штабелера после неточного позиционирования LOTX(заведомо большая путей разгона и торможения КШ) - в третьем цифровом компараторе 43; соответствующие уставки времени - в элементах 32,33 и 40 выдержки времени.
В узле 15 задания адреса ячейки блока 1 задания координаты задают адрес искомой ячейки склада (по данной координате), При этом на выходе узла 16 памяти координаты ячейки формируется код координаты
искомой ячейки, а на выходе элемента 22 памяти блока 10 коррекции (накопленной погрешности фотодатчика) формируется величина, равная половине зоны нечувствительности индуктивного датчика 9 (приблизительно равная половине ширины шунта искомой ячейки), причем на выходе элемента 22 памяти получается положительное или отрицательное значение в зависимости от направления перемещения крана-штабелера.
На выходе сумматора 23 блока 10 коррекции (накопленной погрешности фотодатчика) формируется код координаты точки
срабатывания индуктивного датчика 9.
В блоке 6 определения действительной координаты подвижного объекта, состоящем из фотоэлектрического датчика 17 перемещения КШ, узла 18 гальванической
развязки, формирователя 19, узла 20 определения направления вращения ФД и реверсивного счетчика 21, формируется код действительной координаты подвижного объекта.
Разность заданной и действительной координат образуется на выходе блока 2 сравнения, а модуль разности заданной и действительной координат IALI получают на выходе блока 3 определения модуля.
Модуль разности заданной и действительной координат поступает на первый вход первого цифрового компаратора 4, на второй вход которого поступает значение зоны ожидания шунта L зоны. В зависимости от величины отклонения действительной координаты от заданной на выходе первого цифрового компаратора 4 появляются сигналы, обеспечивающие перемещение КШ на большой либо малой скорости,
Направление перемещения КШ задается выходным сигналом блока 7 определения направления движения.
При поступлении сигнала Пуск начинается перемещение крана-штабелера к искомой оси, а также происходит установка первого триггера 34, сигнал с выхода которого разрешает срабатывание шестого элемента И 35 блока 13 повторного позиционирования, подготавливает цепь для прохождения сигнала, разрешающего работу блока 14 определения начала торможения. Одновременно выходной сигнал триггера 34 производит запись во второй элемент 44 памяти блока 14 определения начала торможения усредненного пути торможения КШ U и через элемент 32 выдержки времени осуществляет сброс счетчика 30 пути торможения.
При входе КШ в окрестность Шунта искомой оси выходной сигнал первого цифрового компаратора 4 переключает КШ на малую скорость и разрешает срабатывание первого элемента И 24 от сигнала индуктивного датчика 9.
При срабатывании индуктивного датчика 9 от шунта 8 искомой оси на выходе первого элемента И 24 появляется единичный сигнал. По этому сигналу происходит запись координаты точки срабатывания индуктивного датчика 9 в реверсивный счетчик 21 блока 6 определения действительной координаты, т.е. осуществляется коррекция реверсивного счетчика 21, в котором действительная координата с возможной накопленной погрешностью от проскальзывания ФД заменяется на координату точки срабатывания индуктивного датчика, которая формируется на выходе блока 10 коррекции накопленной погрешности ФД.
Единичный сигнал с выхода элемента И 24 через элемент 61 И 35 и ИЛИ 36 устанавливает триггер 37, выход которого разрешает срабатывание элемента И 46, подготавливая цепь для прохождения сигнала с блока 14 определения начала торможения на вход блока 5 управления механизмами крана-штабелера.
На первый вход четвертого цифрового компаратора 45 поступает усредненный путь торможения КШ , а на второй - модуль разности действительной и заданной координат |Д LI . Когда значение модуля разности заданной и действительной координаты IALI становится меньше усредненного пути торможения LЈ . срабатывает цифровой компаратор 45 блока 14 определения начала торможения и его выходной сигнал через элемент И 46 обеспечивает остановку КШ.
Однако в связи с большой массой КШ продолжает в течение некоторого времени движение по инерции (путь торможения).
Выбор ширины шунта равным удвоенной величине усредненного пути торможения в большом количестве случаев обеспечивает останов КШ после выбега в пределах допустимой погрешности позиционирования. Однако возможен и выход КШ за допустимую зону. Поэтому выходной сигнал элемента И 46 также запускает второй элемент 33 выдержки времени и разрешает прохождение сигналов с узла 20 определения направления вращения ФД через элементы И 28 и 29 на выход счетчика 30 пути торможения.
По прошествии времени Г2, которое заведомо больше времени торможения КШ, срабатывает второй элемент 33 выдержки времени и запрещает дальнейшее прохождение импульсов с узла 20 определения направления вращения ФД на вход счетчика 30 пути торможения. Таким образом, за время Г2 в счетчике 30 пути торможения
накапливается количество импульсов, пропорциональное пути торможения КШ. Одновременно выходной сигнал элемента 33 выдержки времени разрешает срабатывание элементов И 26 и 27, подготавливая
цепь прохождения сигналов с цифрового компаратора 25 блока 11 проверки точности позиционирования.
На первый вход цифрового компаратора 25 поступает значение допустимой погрешности позиционирования д L, на второй - модуль разности заданной и действительной координат IALI .
Если модуль разности заданной и действительности координат меньше допустимой погрешности позиционирования д L, то на выходе второго цифрового компаратора 25 появляется сигнал Конец позиционирования, свидетельствующий о том, что позиционирование выполнено с необходимой точностью, который, пройдя через элемент И 26 и элемент ИЛИ 42, сбрасывает триггеры 34 и 37, тем самым подготавливая устройство к дальнейшей работе.
Если IALI д L , то на выходе второго
цифрового компаратора 25 появляется сигнал Неточное позиционирование, который, пройдя через третий элемент И 27, обеспечивает.-реверс КШ для осуществления повторного подхода КШ к искомой оси;
сброс триггеров 34 и 37 (через элемент ИЛИ 42), тем самым подготавливая устройство к повторному подходу; запись в элемент 44 памяти модуля пути торможения (через элемент ИЛИ 41), образующегося на выходе
элемента 31 определения модуля датчика 12 пути торможения, заменяющего в цифровом компараторе 45 блока 14 определения начала торможения усредненный путь торможения КШ Lo на действительный путь
торможения; сброс 30 счетчика пути торможения (через элемент ИЛИ 41 и элемент 32 выдержки времени), подготавливая датчик 12 пути торможения для повторного измерения тормозного пути КШ; установку
триггера 38, выход которого разрешает срабатывание элемента И 39, подготавливая цепь прохождения сигнала с цифрового компаратора 43 блока 13 повторного позиционирования.
При реверсе КШ, когда модуль разности заданной и действительной координат IA Li становится большим величины отхода КШ LOTX. на выходе цифрового компаратора 43 блока 13 повторного позиционирования
появляется сигнал, который, пройдя элемент И 39, обеспечивает остановку КШ и запускает элемент 40 выдержки времени
По прошествии времени гз, которое заведомо больше времени торможения КШ, срабатывает элемент 40 выдержки времени, выходной сигнал которого обеспечивает: повторный подход КШ к искомой оси (на малой скорости); сброс триггера 38, тем самым подготавливая устройство к дальней- шей работе; установку триггера 37 (через первый элемент ИЛИ 36), выход которого разрешает срабатывание элемента И 46, подготавливая цепь для прохождения сигнала с блока 14 определения начала тормо- жения.
При повторном позиционировании цифровой компаратор 45 срабатывает, когда модуль разности заданной и действительной координат |Д LI становится меньше модуля пути торможения |LT|I. Его выходной сигнал через элемент И 46 обеспечивает начало остановки КШ в новой точке упреждения, так как после неточного позиционирования на первом входе цифре- вого компаратора 45 вместо усредненного пути торможения КШ Lo появляется действительный путь торможения.
Смещение точки начала торможения в зависимости от действительного пути тор- можеиия КШ обеспечивает сходимость процесса, а следовательно, позиционирование КШ с заданной точностью при повторном позиционировании.
При неполучении заданной точности по- зиционирования при повторной попытке позиционирование повторяется с очередной заменой уставки в элементе 44 памяти на уставку LTH-I.I равную действительному пути
торможения КШ при повторной попытке позиционирования..
При каждом срабатывании индуктивного датчика 9 от шунта 8 может возникнуть дополнительная случайная погрешность срабатывания вследствие изменения величины торцового зазора X (фиг. 4). Погрешность может достигать существенных значений (кривая 1, фиг. 4). Ди фференциаль- ное включение индуктивных датчиков 9 и 47 относительно шунта 8 позволяет значительно снизить величину случайной погрешности срабатывания, ограничив ее участком 3-4 кривой 2 (фиг. 4), а остальную часть случайной погрешности перевести в разряд систематических погрешностей, компенсируемых автоматических.
Формула изобретения 1. Устройство для управления автоматической транспортно-складской системой, содержащее блок задания координаты, блок определения действительной координаты, блок сравнения, блок определения модуля, блок управления механизмами крана-штабелера, блок коррекции, блок определения направления движения, блок проверки точности позиционирования, индуктивный датчик и цифровой компаратор, первый и второй выходы которого соединены соответственно с первым и вторым входами блока управления механизмами крана-штабелера, первый выход блока сравнения соединен с входом блока определения направления движения, выход которого соединен с третьим входом блока управления механизмами крана-штабелераи с первым входом блока коррекции, второй выход цифрового компаратора соединен с вторым входом блока коррекции, первый вход блока сравнения соединен с первым выходом блока задания координаты и с третьим входом блока коррекции, второй вход блока сравнения соединен с первым выходом блока определения действительной координаты, состоящего из последовательно соединенных фотоэлектрического датчика перемещения крана-штабелера, узла гальванической развязки, формирователя, узла определения направления вращения фотодатчика, первый и второй выходы которого соединены соответственно с управляющими входами реверсивного счетчика импульсов, четвертый вход блока коррекции соединен с выходом индуктивного датчика, второй выход блока задания координаты соединен с пятым входом блока коррекции, первый и второй выходы блока коррекции соединены соответственно с первым и вторым входами блока определения действительной координаты, первый вход блока проверки точности позиционирования соединен с первым входом первого цифрового компаратора и выходом блока определения модуля, второй вход является уставкой системы, первый выход соединен с четвертым входом блока управления механизмами крана-штабелера, вход блока определения модуля соединен с вторым выходом блока сравнения, отличающееся тем, что, с целью повышения точности позиционирования, в него введены датчик пути торможения, блок повторного позиционирования и блок определения начала торможения, первый вход блока определения начала торможения соединен с первым входом блока повторного позиционирования и с выходом блока определения модуля, второй, третий и четвертый входы блока определения начала торможения соединены соответственно с
первым, вторым и третьим выходами блока повторного позиционирования, пятый вход блока определения начала торможения соединен с первым выходом датчика пути торможения, выход блока опреде- ления начала торможения соединен с пятым входом блока управления механизмами и с первым входом датчика пути торможения, второй выход которого соединен с вторым входом блока проверки точности позиционирования, второй выход которого соединен с вторым входом блока повторного позиционирования, третий вход которого соединен с вторым выходом блока коррекции, пятый и шестой выходы блока повторного позиционирования соединены соответственно с шестым и седьмым входами блока управления механизмами крана-штабелера.
2.Устройство поп. 1,отличающее- с я тем, что блок определения начала торможения содержит элемент памяти, цифровой компаратор и элемент И, первый, второй и третий входы элемента памяти соединены соответственно с вторым, третьим и пятым входами блока определения начала торможения, первый вход цифрового компаратора соединен с выходом элемента памяти, второй вход является первым входом бло- ка определения начала торможения, первый вход элемента И соединен с выходом цифрового компаратора, второй вход элемента И соединен с четвертым входом блока определения начала торможения, а выход элемента И соединен с выходом блока определения начала торможения.
3.Устройство по п. 1,отличающее- с я тем, что блок повторного позиционирования содержит три триггера, три элемента ИЛИ, цифровой компаратор, два элемента
И и элемент выдержки времени, выход первого триггера соединен с первыми входами первого элемента И и первого элемента ИЛИ, а также с четвертым выходом бло- ка повторного позиционирования, первый вход первого триггера соединен с первым входом второго триггера и с выходом второго элемента ИЛИ, второй вход первого триггера является входом Пуск блока повторного позиционирования, второй вход первого элемента И соединен с четвертым входом блока повторного позиционирования, выход первого элемента И соединен с первым входом третьего элемента ИЛИ, второй вход которого соединен с первым входом третьего триггера, а выход соединен с вторым входом второго триггера, выход второго триггера соединен с входом блока повторного позиционирования, выход первого элемента ИЛИ соединен с вторым выходом блока повторного позиционирования, выход третьего триггера соединен с первым входом второго элемента И, второй вход соединен с выходом цифрового компаратора, первый вход которого соединен с первым входом блока повторного позиционирования, выход второго элемента И соединен с входом элемента выдержки времени и с четвертым выходом блока повторного позиционирования, выход элемента выдержки времени соединен с пятым выходом блока повторного позиционирования, второй вход цифрового компаратора является входом уставки блока повторного позиционирования.
4. Устройство по п. 1,отличающее- с я тем, что датчик пути торможения содержит первый элемент И, счетчик пути торможения, элемент определения модуля, первый и второй элементы выдержки времени, второй элемент И, первый выход первого элемента выдержки времени соединен с первыми входами второго элемента И и первого элемента И. выход второго элемента выдержки времени соединен с первым входом счетчика пути торможения, второй вход которого соединен с выходом второго элемента И, вход второго элемента выдержки времени соединен с вторыми входами первого и второго элементов И и с третьим входом датчика торможения, третьи входы первого и второго элементов И соединены соответственно с вторым и третьим входами датчика пути торможения, вход второго элемента выдержки времени подключен к четвертому входу датчика пути торможения, выход элемента определения модуля подключен к первому выходу датчика пути торможения, второй выход первого элемента выдержки времени соединен с вторым выходом датчика пути торможения, выход первого элемента И соединен с третьим входом счетчика пути торможения, выход которого соединен с входом элемента определения модуля,
со т о ю в со
s
%
3
AL
LmeKt.
/Ш


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
| Многоканальное устройство для управления позиционированием | 1984 |
|
SU1242917A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Устройство управления приводом механизма передвижения транспортного средства для обслуживания стеллажа | 1986 |
|
SU1402520A1 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |



Изобретение предназначено для использования при автоматическом управлении подвижными объектами типа рельсовых реверсивных кранов-штабелеров. Цель изобретения - повышение точности позиционирования. В устройстве для управления автоматической транспортно-складской системой за счет введения датчика пути торможения, блока повторного позиционирования и блока определения начала торможения стало возможным повысить точность позиционирования. 3 з.п.ф-лы, 4 ил.
Фиг.1
Фиг.3
47
.4
- + -
у
7
5 J
If
3 2
;
J I|
5 ц j 2 ;
| Шведов В | |||
| Е | |||
| и др | |||
| Автоматизированные системы перемещения на складах | |||
| - Л., ЛДНТИ, 1988, с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Патент США № 4428708, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
