Изобретение относится к конвейерному транспорту, а именно к устройствам для центрирования холостой ветви ленты конвейера, и может быть использовано на горных предприятиях и предприятиях строительной индустрии.
Цель изобретения - повышение эффективности центрирования ленты конвейера.
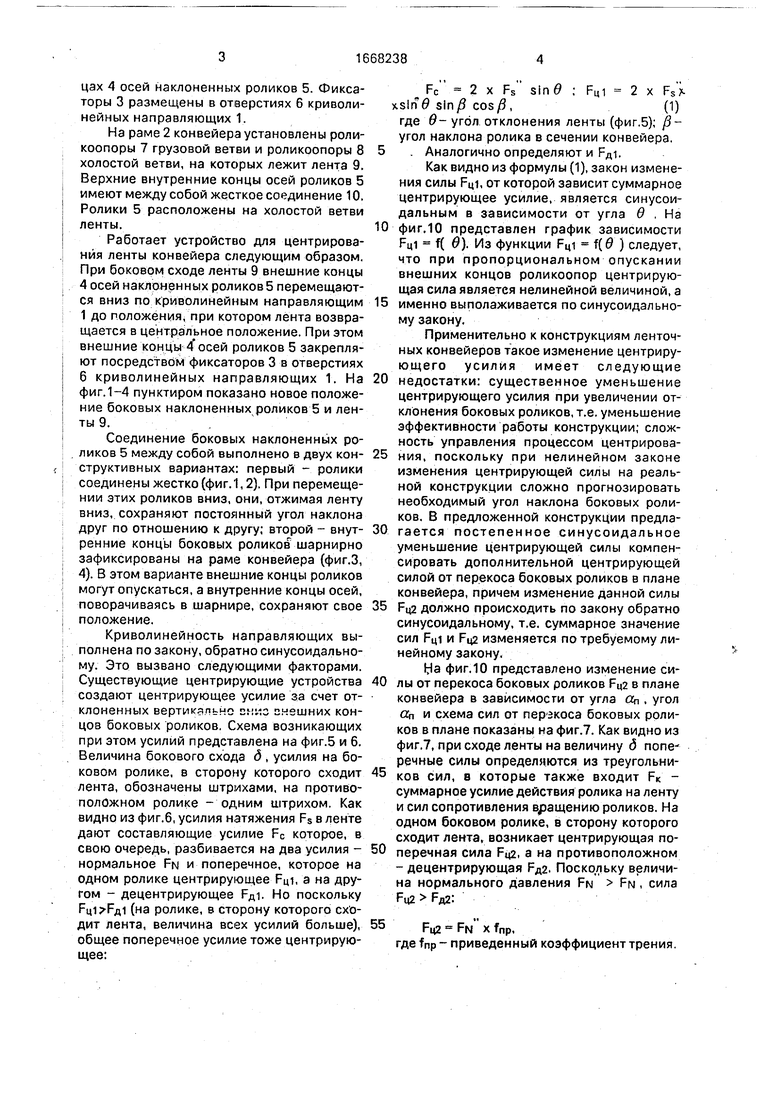
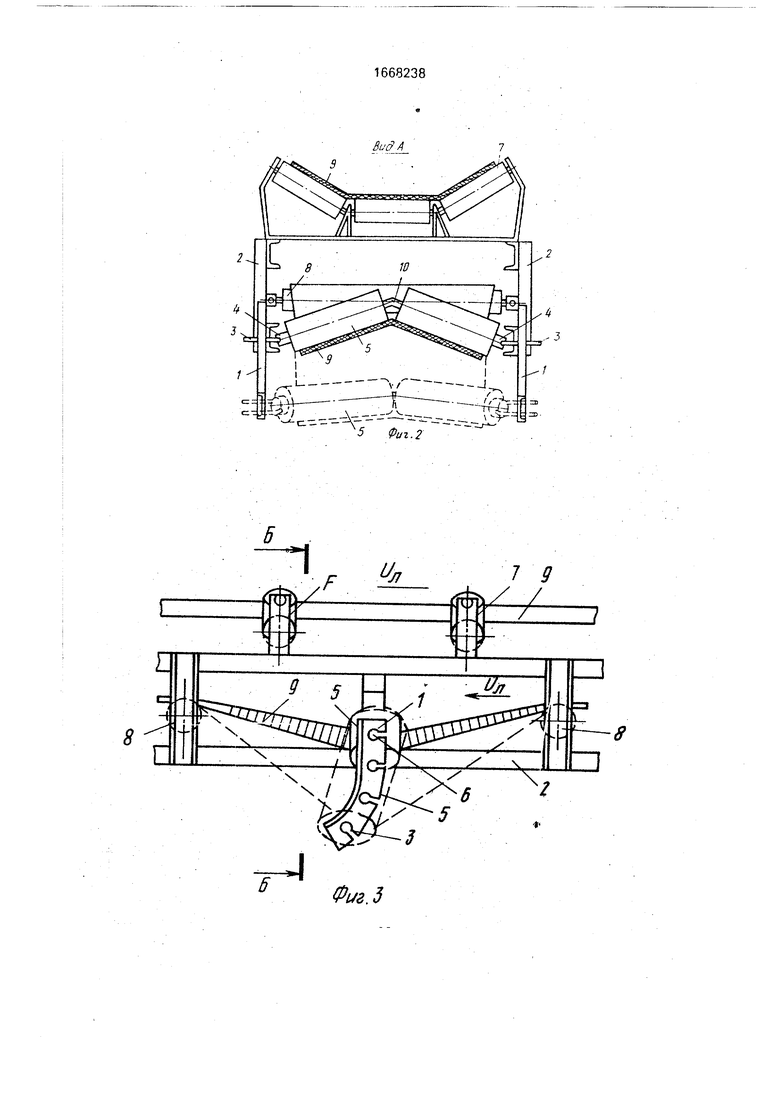
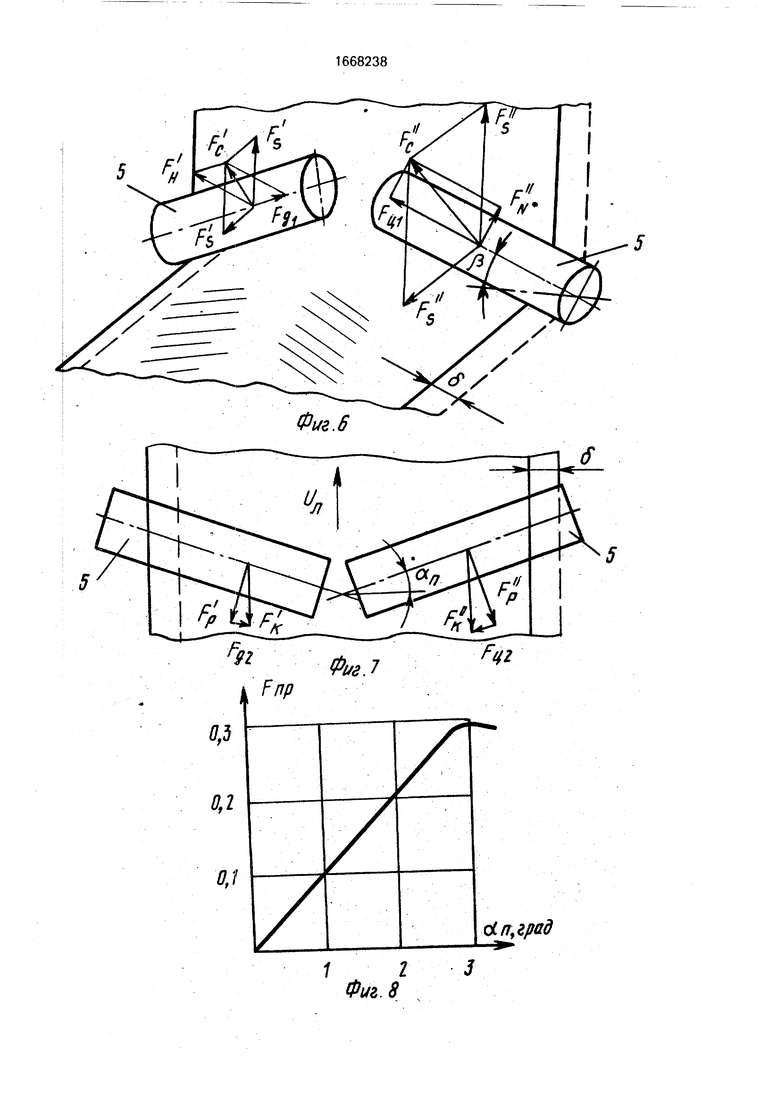
На фиг.1 изображено устройство для центрирования холостой ветви ленты, вид сбоку; на фиг.2 - разрез А-А на фиг,1; на фиг.З - вариант выполнения криволинейных направляющих; на фиг.4 - разрез по Б-Б на фиг.З; на фиг.5 - схема сил от натяжения
ленты; на фиг. 6-разложение сил на составляющие от натяжения ленты; на фиг.7 - схема сил, возникающих от перекоса роликов; на фиг.8 - изменение приведенного коэффициента fn от угла перекоса в плане; на фиг.9 - траектория внешних концов роликов; на фиг. 10 - изменение центрирующих сил в зависимости от углов наклона роликов.
Устройство для центрирования холостой ветви ленты конвейера состоит из опорных элементов в виде криволинейных направляющих 1, закрепленных на раме 2 конвейера, с вилкообразными фиксаторами 3, установленными на нижних внешних коно сь
00
N3 СО
оо
цах 4 осей наклоненных роликов 5. Фиксаторы 3 размещены в отверстиях 6 криволинейных направляющих 1.
На раме 2 конвейера установлены роли- коопоры 7 грузовой ветви и роликоопоры 8 холостой ветви, на которых лежит лента 9. Верхние внутренние концы осей роликов 5 имеют между собой жесткое соединение 10, Ролики 5 расположены на холостой ветви ленты.
Работает устройство для центрирования ленты конвейера следующим образом. При боковом сходе ленты 9 внешние концы 4 осей наклоненных роликов 5 перемещаются вниз по криволинейным направляющим 1 до положения, при котором лента возвращается в центральное положение. При этом внешние концы роликов 5 закрепляют посредством фиксаторов 3 в отверстиях 6 криволинейных направляющих 1. На фиг. 1-4 пунктиром показано новое положение боковых наклоненных роликов 5 и ленты 9.
Соединение боковых наклоненных роликов 5 между собой выполнено в двух конструктивных вариантах: первый - ролики соединены жестко (фиг. 1,2). При перемещении этих роликов вниз, они, отжимая ленту вниз, сохраняют постоянный угол наклона друг по отношению к другу; второй - внутренние концы боковых роликов шарнирно зафиксированы на раме конвейера (фиг.З, 4). В этом варианте внешние концы роликов могут опускаться, а внутренние концы осей, поворачиваясь в шарнире, сохраняют свое положение.
Криволинейность направляющих выполнена по закону, обратно синусоидальному. Это вызвано следующими факторами. Существующие центрирующие устройства создают центрирующее усилие за счет отклоненных вертикально внис внешних концов боковых роликов. Схема возникающих при этом усилий представлена на фиг.5 и 6. Величина бокового схода д, усилия на боковом ролике, в сторону которого сходит лента, обозначены штрихами, на противоположном ролике - одним штрихом. Как видно из фиг.6, усилия натяжения Fs в ленте дают составляющие усилие Fc которое, в свою очередь, разбивается на два усилия - нормальное FN и поперечное, которое на одном ролике центрирующее Fui, а на другом - децентрирующее FAi. Но поскольку (на ролике, в сторону которого сходит лента, величина всех усилий больше), общее поперечное усилие тоже центрирующее:
FC 2 х Fs sin# ; РЦ1 2 х Fs slntf sin/ cos/3,(1)
где в- угол отклонения ленты (фиг.5); /3- угол наклона ролика в сечении конвейера.
Аналогично определяют и РД1.
Как видно из формулы (1), закон изменения силы F4i, от которой зависит суммарное центрирующее усилие, является синусоидальным в зависимости от угла в . На
фиг.10 представлен график зависимости Рц1 f( в). Из функции F4i f(0 ) следует, что при пропорциональном опускании внешних концов роликоопор центрирующая сила является нелинейной величиной, а
именно выполаживается по синусоидальному закону.
Применительно к конструкциям ленточных конвейеров такое изменение центрирующего усилия имеет следующие
недостатки: существенное уменьшение центрирующего усилия при увеличении отклонения боковых роликов, т.е. уменьшение эффективности работы конструкции; сложность управления процессом центрирования, поскольку при нелинейном законе изменения центрирующей силы на реальной конструкции сложно прогнозировать необходимый угол наклона боковых роликов. В предложенной конструкции предлагается постепенное синусоидальное уменьшение центрирующей силы компенсировать дополнительной центрирующей силой от перекоса боковых роликов в плане конвейера, причем изменение данной силы
Рц2 должно происходить по закону обратно синусоидальному, т.е. суммарное значение сил Рц1 и Рц2 изменяется по требуемому линейному закону.
У а фиг. 10 представлено изменение силы от перекоса боковых роликов Рца в плане конвейера в зависимости от угла On , угол On и схема сил от пер-зкоса боковых роликов в плане показаны на фиг.7. Как видно из фиг.7, при сходе ленты на величину б поперечные силы определяются из треугольников сил, в которые также входит FK - суммарное усилие действия ролика на ленту и сил сопротивления вращению роликов. На одном боковом ролике, в сторону которого сходит лента, возникает центрирующая поперечная сила Fig, а на противоположном - децентрирующая РД2. Поскольку величина нормального давления FN FN , сила
Fq2 Рд2:
Рц2 FN х fnp,
где fnp - приведенный коэффициент трения.
Как показывают многочисленные исследования, угол эффективного поворота центрирующей опоры в плане конвейера 2-3°.
Поворот ролика свыше а
неэффективен, поскольку начинается проскальзывание ленты при перемещении по ролику, и величина центрирующей силы Рц2 не возрастает. Изменение приведенного коэффициента трения fnp в зависимости от угла перекоса On показано на фиг.8. Изменение fnp, от которого зависит изменение Рца, примерно линейно. Следовательно, чтобы придать функции РЦ2 f(0n) нелинейный характер, а именно обратно синусоидальный, необходимо траекторию внешних концов боковых роликов пустить по закону обратно синусоидальному. Характер траектории внешних концов боковых роликов показан на фиг.9.
Перемещая внешние концы боковых роликов по закону обратно синусоидальному, получаем по такому же закону приращение силы Рц2, как указано на фиг. 10, функция Рц2 f(On). Суммарная центрирующая сила от натяжения ленты Fui f(0), и перекос боковых роликов в плане конвейера Рц2 f(«n) имеет линейный харакРц1 + Рц2(фИГ.Ю).
Конструктивно это выглядит, как указано на фиг.1 и 3, где криволинейные направтер F,
10
15
20
25
30
ляющие изогнуты по закону обратно синусоидальному.
Формула изобретения
1. Устройство для центрирования ленты конвейера, включающее опорные элементы, наклонно расположенные над холостой ветвью ленты ролики, соединенные верхними внутренними концами осей между собой, а нижними внешними концами осей - с опорными элементами, отличающееся тем, что, с целью повышения эффективности центрирования ленты конвейера, опорные элементы выполнены в виде криволинейных направляющих, в которых установлены посредством фиксаторов внешние концы осей роликов, с возможностью их перемещения вдоль криволинейных направляющих и наклона внутренних концов осей роликов в сторону, противоположную направлению движения ленты, причем криволинейность направляющих выполнена по закону изменения обратно синусоидальному.
2. Устройство поп.1,отличающее- с я тем, что фиксаторы закреплены на внешних концах осей роликов и имеют вилкообразную форму, а в криволинейных направляющих выполнены отверстия с возможностью размещения в них фиксаторов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для центрирования холостой ветви ленты конвейера | 1983 |
|
SU1122589A1 |
| Устройство для центрирования ленты конвейера | 1990 |
|
SU1798293A1 |
| Устройство для центрирования холостой ветви ленты конвейера | 1985 |
|
SU1407871A1 |
| Устройство для центрирования холостой ветви ленты конвейера | 1988 |
|
SU1572942A1 |
| Устройство для центрирования ленты конвейера | 1983 |
|
SU1142378A1 |
| Устройство для центрирования ленты конвейера | 1990 |
|
SU1770229A1 |
| Способ автоматического постоянного центрирования ленты роликами на желобчатых и трубчатых конвейерах | 2017 |
|
RU2679276C1 |
| Став ленточного конвейера | 1984 |
|
SU1433876A1 |
| Ленточный конвейер | 1982 |
|
SU1020317A1 |
| Центрирующее устройство для конвейерной ленты | 2018 |
|
RU2706022C1 |

Изобретение относится к конвейерному транспорту, а именно к устройствам для центрирования ленты конвейера, и может быть использовано на горных предприятиях и предприятиях строительной индустрии. Цель изобретения - повышение эффективности центрирования ленты конвейера. Устройство содержит ролики (Р) 5, соединенные верхними внутренними концами осей между собой жестким соединением 10. Внутренние концы осей Р 5 можно соединить при помощи шарнира. Нижние внешние концы 4 осей Р 5 связаны посредством фиксаторов с опорными элементами, выполненными в виде криволинейных направляющих (КН) 1. Внешние концы 4 осей имеют возможность перемещения вдоль КН 1. Внутренние концы осейР 5 имеют возможность наклона в сторону, противоположную направлению движения ленты. Фиксаторы закреплены на внешних концах осей Р 5 и имеют вилкообразную форму. Они размещены в отверстиях 6 КН 1, которые выполнены по закону изменения обратно синусоидальному. При перемещении нижних концов осей Р 5 по КН 1 обеспечивается изменение положения Р 5 относительно холостой ветви ленты 9. 1 з.п.ф-лы, 10 ил.
8
Фиг. 5
Вис А
F±8
Фм.5
Фиг.4
din, град
9
сап, град
Траекторий Внешних концоб роликоб
& fград
Фиг. 9
VV
(0)
FU2-f(n)
в, град
&п,ерад
| Патент США № 3269518, кл | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Двухтактный двигатель внутреннего горения | 1924 |
|
SU1966A1 |
| Раздвижное крыло самолета | 1931 |
|
SU38429A1 |
| Горный компас | 0 |
|
SU81A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
