Изобретение относится к автоматизации загрузки листовых заготовок перед их обработкой и может быть использовано в робототехнических комплексах штамповки.
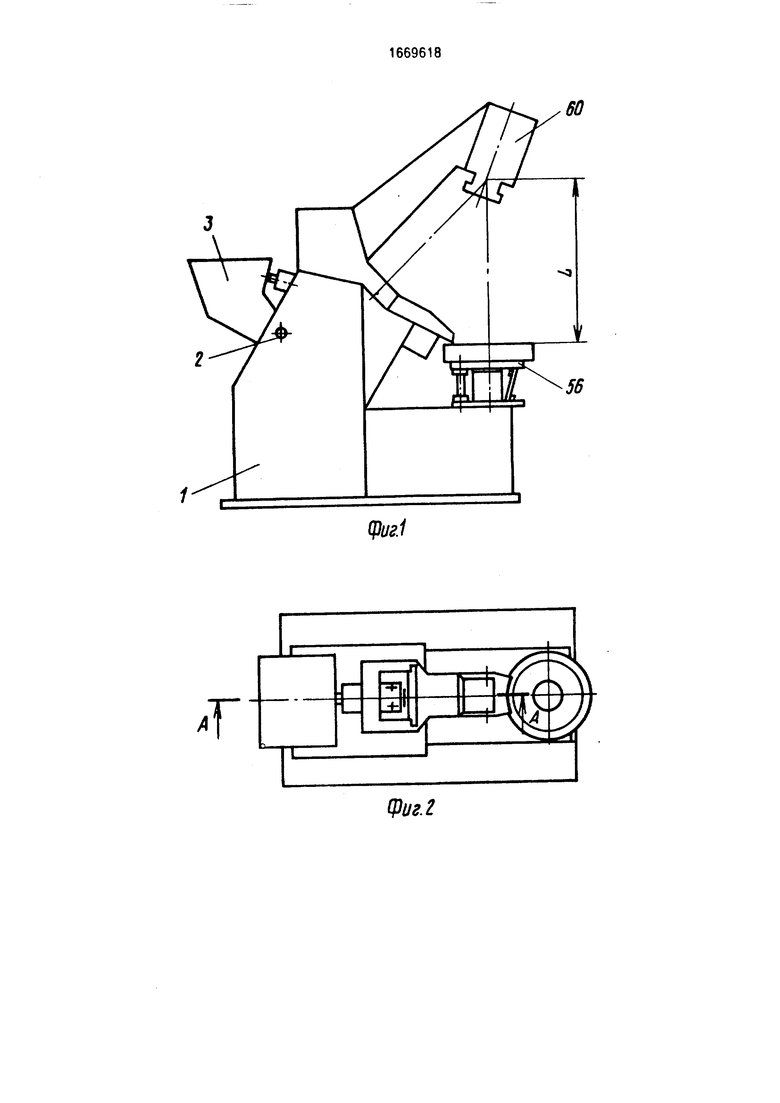
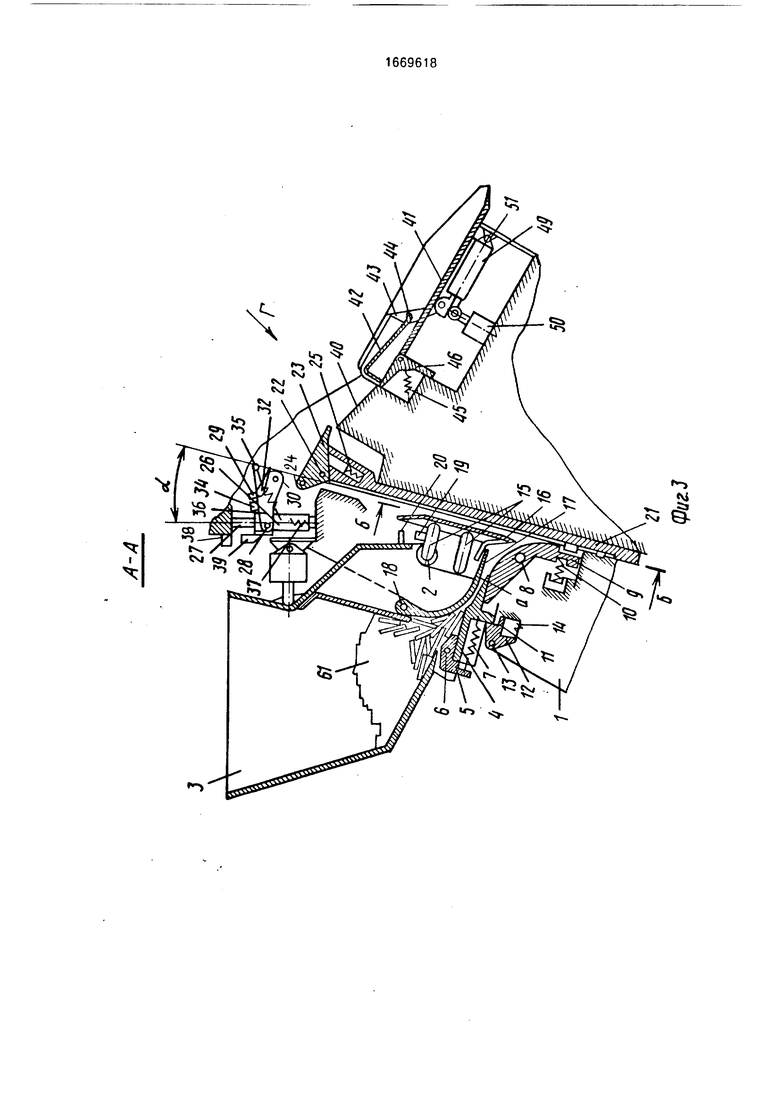
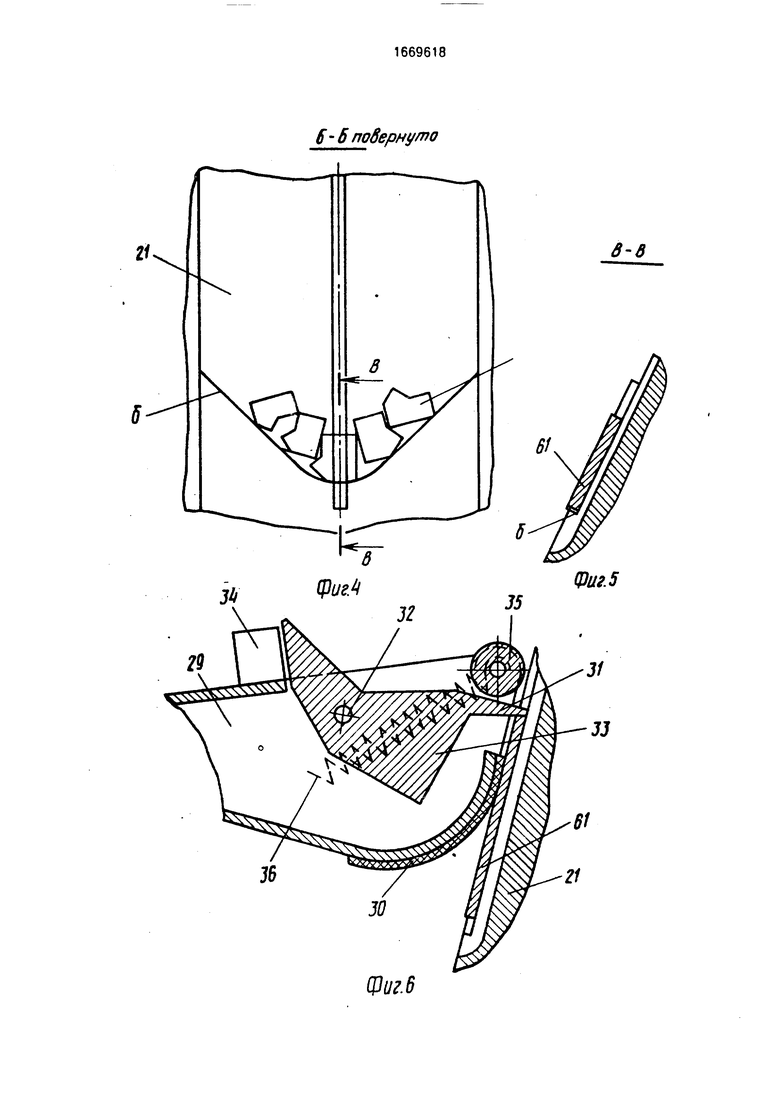
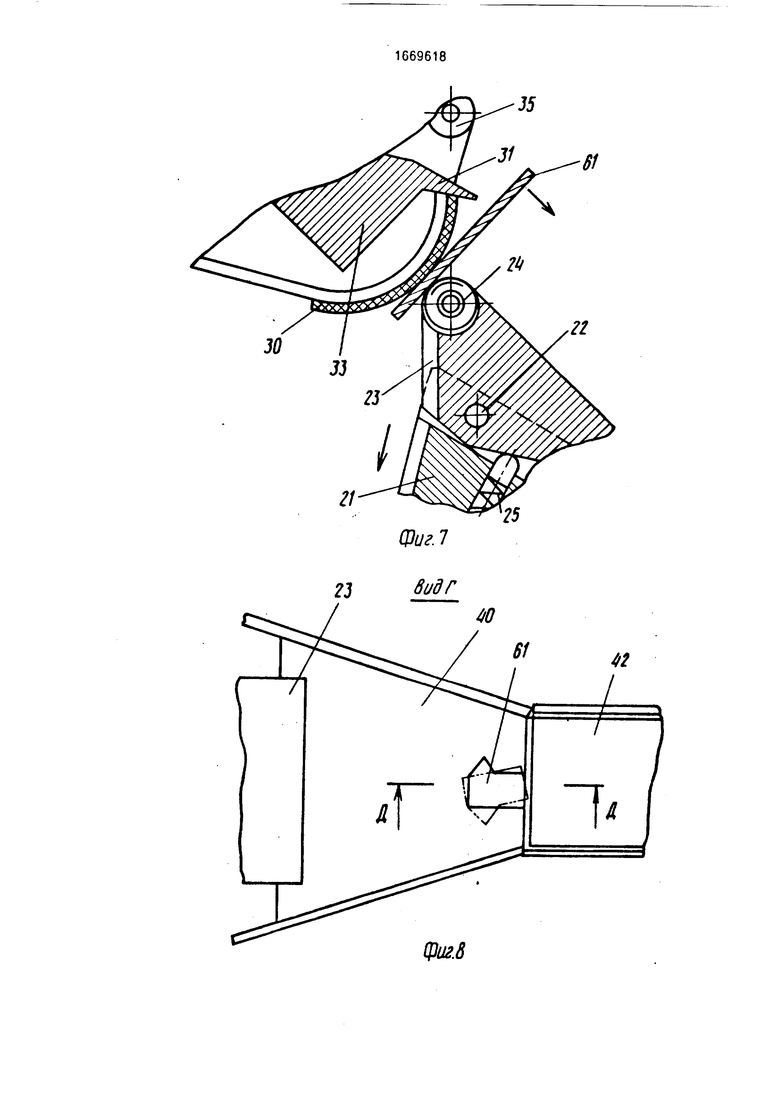
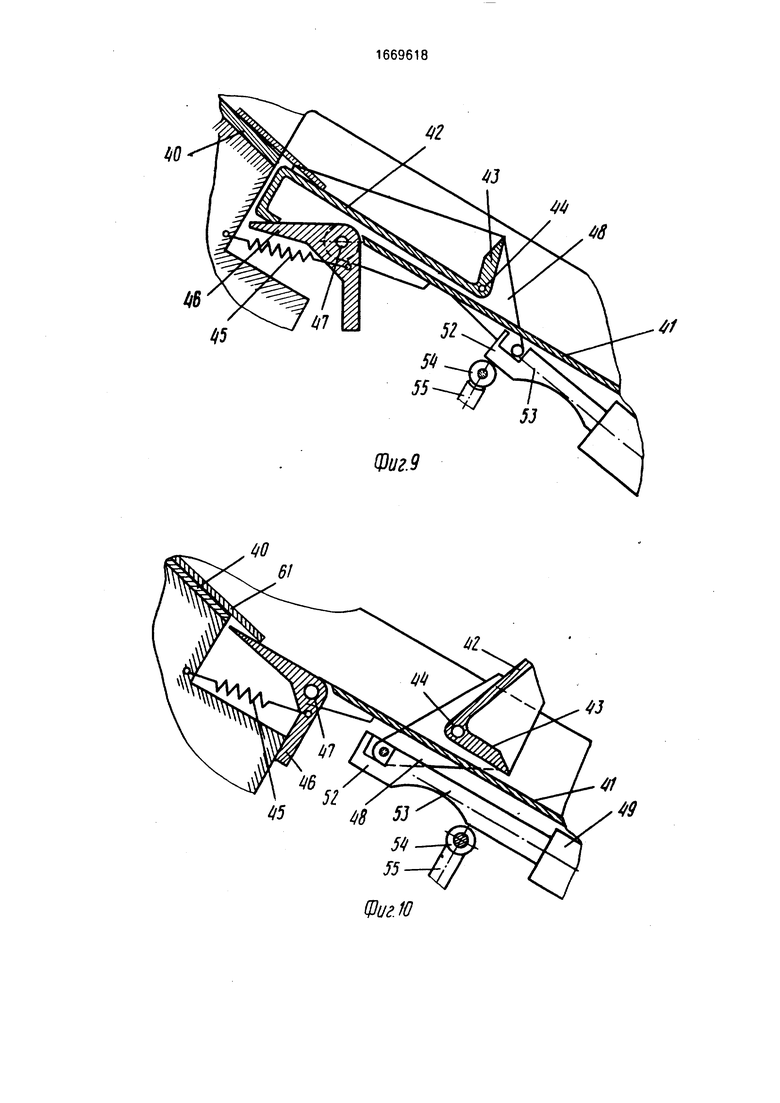
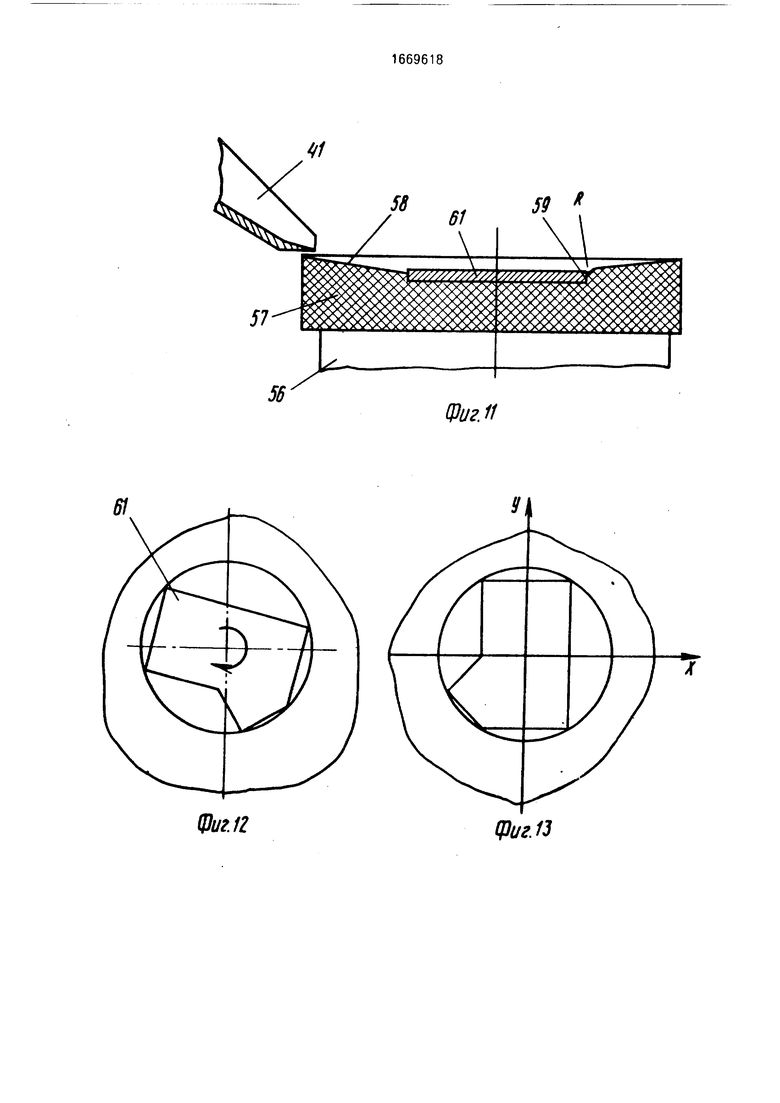
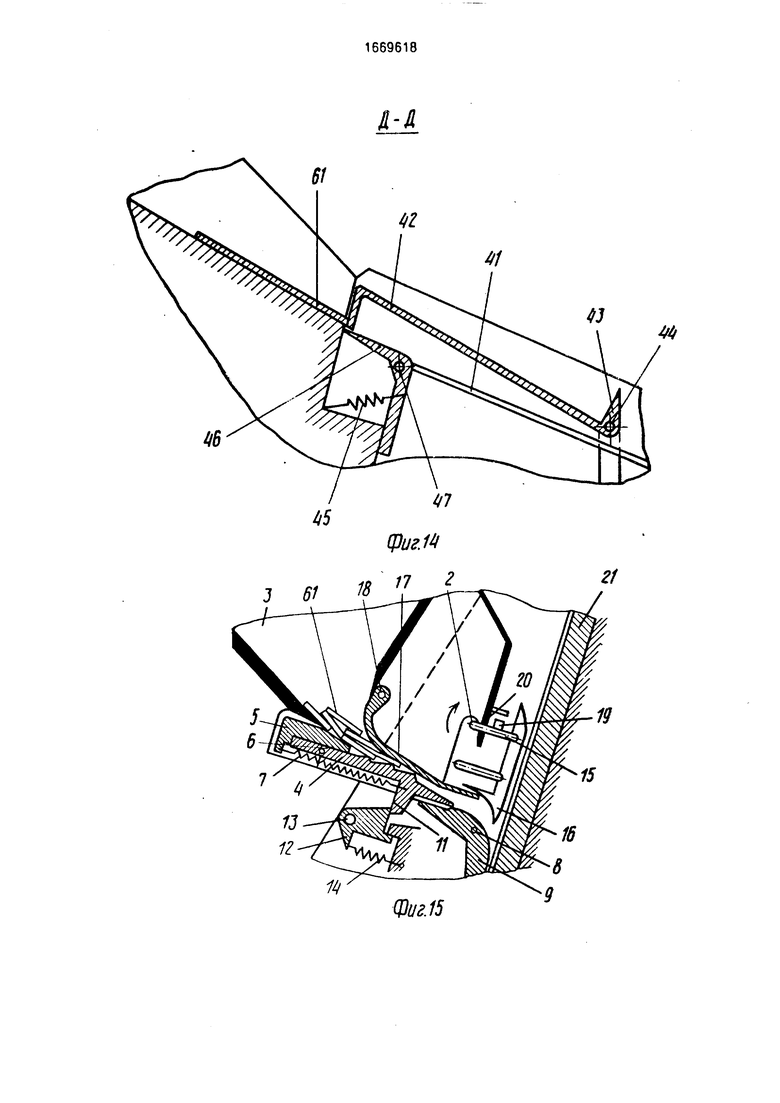
Целью изобретения является повышение надежности. На фиг. 1 показано устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - рабочая плоскость шибера, разрез Б-Б на фиг. 3; на фиг. 5-разрез В-В на фиг. 4; на фиг. 6 - фиксированное положение и удержание детали при реверсе и перемещении шибера вниз; на фиг. 7 - взаимодействие механизмов удержания и сброса деталей при подходе шибера к крайнему нижнему положению; на фиг. 8 - вид Г на фиг. 3; на фиг. 9 - устройство переворота детали (положение, когда деталь должна быть перевернута на другую сторону); на фиг. 10 - то же. деталь лежит правильной стороной; на фиг. 11 - вибростол (деталь на основании трафарета); на фиг. 12 - то же, положение деталиi; на фиг. 13 - то же, положение правильно
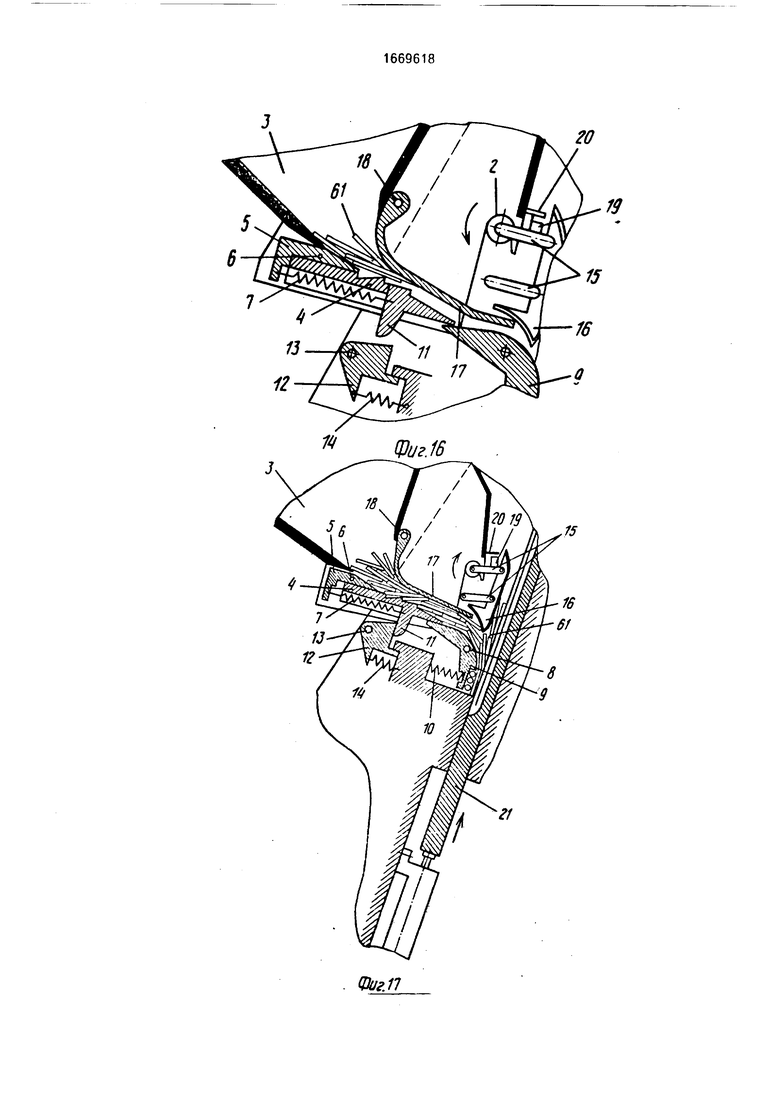
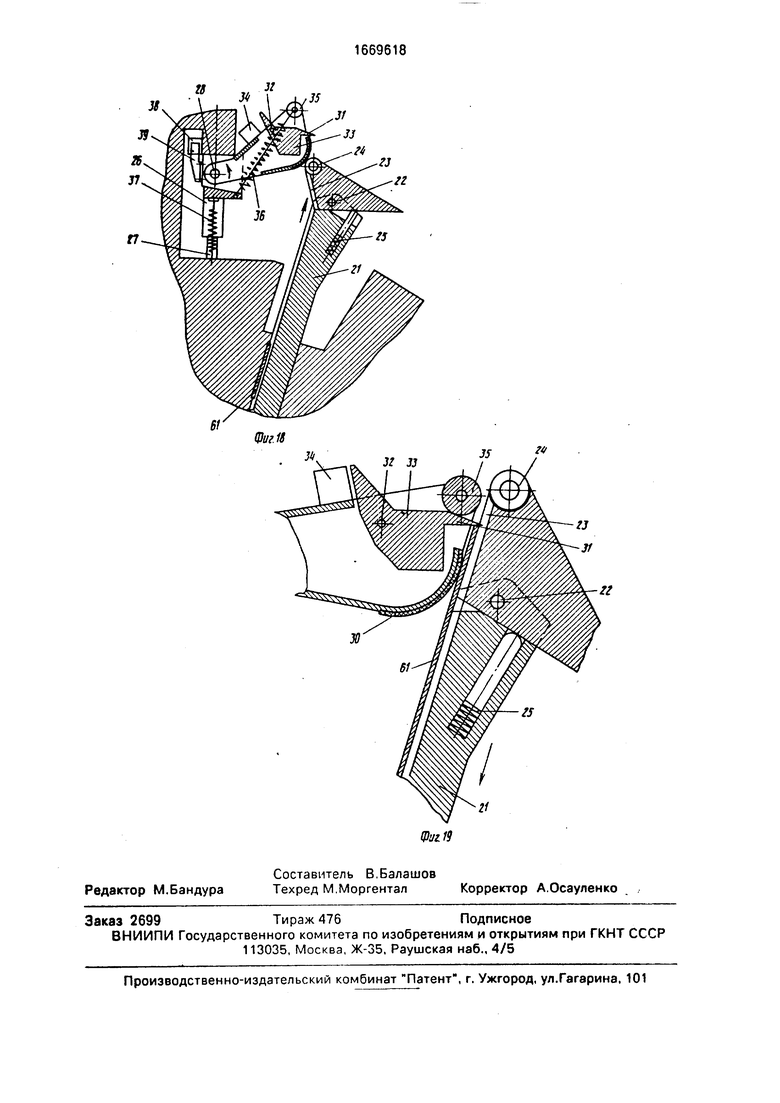
ориентированной детали; на фиг. 14 - разрез Д-Д на фиг. 8 (положение детали в момент разпознавания ее по стороне); на фиг. 15 - взаимодействие толкателя с собачкой во время поворота бункера по часовой стрелке; на фиг. 16 - положение, когда толкатель при дальнейшем повороте бункера сорвался с собачки и подтянулся к корпусу; на фиг. 17 - положение переполнений деталями заборной зоны, шибера; на фиг. 18 - взаимодействие механизмов удержания и сброса деталей в начальный момент движения шибера вверх, на фиг. 19 - фиксированное положение и удержание детали при подходе механизма сброса к механизму удержания сверху при ходе шибера вниз.
Устройство для ориентирования плоских деталей смонтировано на станине 1 и состоит из качающегося на оси 2 бункера 3, в нижней части имеется толкатель 4, связанный направляющими (не показаны) с корпусом 5, который качается на оси 6. Толкатель подпружинен пружиной 7 - сво(Л
С
&
о о о о
00
бодным концом опирается на дугообразную поверхность качающейся на оси 8 стенки 9 с пружиной 10 и фиксируется в нижнем положении бункера 3 через зуб 11 собачкой 12, смонтированной на оси 13, с пружиной 14. Над толкателем 4 и стенкой 9 внутри станины подвешен на двух равных рычагах 15 механизм формирования и контроля потока деталей, состоящий из двух заслонок, повторяющих заборную полость шибера, причем заслонка 16 имеет форму клина и опирается на бункерную заслонку 17, установленную на оси 18.
На одном из рычагов 15 установлен датчик 19, контактирующий с флажком 20 на стенке бункера 3. Дугообразная стенка 9 контактирует поверхностью роликов с рабочей поверхностью приводного шибера 21, несущего на себе механизмы сбрасывателя, состоящего из качающегося на оси 22 наклонного склиза 23 с роликом 24 на конце и пружиной 25.
В верхней части бункера смонтирован механизм удержания детали, состоящий из каретки 26 с направляющими скалками 27, установленных под углом и к рабочей плоскости шибера и качающегося на оси 28 рычага 29 с рабочей поверхностью 30, ограничителя 31 с осью 32 и противовесом 33. На рычаге 29 установлены также датчик 34, контактирующий со свободным концом ограничителя, и опорный ролик 35. Рычаг 29 подпружинен относительно каретки 26 пружиной 36, а каретка относительно станины 1 - пружиной 37.
Перемещение каретки контролируется датчиком 38 от флажка 39, закрепленного на корпусе каретки.
Устройство переворота детали по стороне состоит из наклонных лотков 40 и 41, разделенных приводной заслонкой 42, имеющей на одном конце упорный буртик 43 с осью 44, а другим концом опирается на подпружиненную пружинлй 45 вставку 46 с осью 47. Заслонка снабжена также тягой 48, которая связана с двумя раздельными приводами 49 и 50, один из которых смонтирован на оси 51 с вилкой 52 на конце штока 53, а другой неподвижно с роликом 54 на конце штока 55.
Возле нижнего края лотка 41 установлен вибростол 56 с трафаретом 57, выполненным в виде чаши, имеющей конусную поверхность 58, переходящую по радиусу R в цилиндрическую поверхность 59, так называемое основание. Диаметр основания описан около контура детали. Над поверхностями наклонного лотка 40 и внбростола 56 смонтировано средство для распознавания образца деталей 60. располагающееся
в зоне схвата двух этих поверхностей на расстоянии L
Первоначально детали 61 находятся в бункере 3.
Устройство работает следующим образом,
По команде системы управления (не показана) включается привод бункера 3 (фиг. 3). Бункер отклоняется по часовой стрелке
0 вокруг оси 2 и тянет за собой корпус 5 и через пружину 7 толкатель 4, Так как толкатель в начальный момент зафиксирован собачкой 12 через зуб 11, то он остается неподвижным относительно станины 1, но
5 получает вращательное движение за счет наклона бункера в ту же сторону, вокруг некоторой точки а. Пружина в это время растягивается (фиг. 15). В момент, когда угол наклона превысит высот/ фиксируемого зу0 ба 11, толкатель 4 под действием пружины 7 срывается с собачки 12 и подтягивается к корпусу 5 по направляющим (не показаны) перемещаясь относительно навала деталей 61 (фиг. 16), остающихся по отношению к
5 толкателю 4 в состоянии инерционного покоя, Таким образом, толкатель 4 своими хра- повидными выступами захватывает порцию деталей в нижней части навала. Далее бункер 3, дойдя флажком 20 до датчика 19,
0 реверсируется приводом в обратном направлении (против часовой стрелки) и проталкивает толкателем порцию деталей 61 в щель под заслонку 17 вдоль дугообразной поверхности стенки 9 одновременно, нажи5 мая обратной поверхностью зуба 11 на собачку 12, отклоняет ее вокруг оси 13 и в конце хода толкатель 4 вновь запирается собачкой 12 под действием пружины 14. По стенке 9 детали соскальзывают в за0 борную зону шибера 21 и при ходе шибера вниз часть деталей, оказавшихся прилегаю- щимися к рабочей плоскости шибера, проталкиваются еще дальше в тупиковую нишу, образованную с одной стороны рабочей по5 верхностью шибера 21, с другой-поверхностью роликов стенки 9, а внизу корпусом станины 1. При переполнении деталями заборной зоны шибера (фиг. 17) заслонка 16 вытесняется образовавшимся сводом дета0 лей из этой зоны и поднимается,поворачивая за собой рычаг 15 с датчиком 19 вокруг оси 2, тем самым уменьшая амплитуду качания бункера 3, что в свою очередь не дает толкателю 4 выходить из зацепления с со5 бачкой 12.
Детали, оказавшиеся в тупиковой нише и прилегающие к рабочей плоскости шибера, выносятся оттуда ходом шибера 21 вверх с помощью острой кромки д. выполненной в виде низкого уступа по всей ширине шибера с наклонными поверхностями от крае- к центру (фиг. 4 и фиг. 5).
Детали, оказавшиеся на плоскости ил- бера вторым слоем, не удерживаются на ней и соскальзывают снова в зону сабора. В начале движения шибера вьерх(см. фиг. 18) механизм сброса деталей подходит снизу к мехэн-яму удержания, каретка доходит до упора вверх, затем рычаг 29 отклоняется вокруг оси 28 и пропускает выступающую за плоскость шибера поверхность 23 с роликом 24. При дальнейшем ходе механизм сброса уходит вверх, а рычаг 29 под деист вием пружин 36 и 37 занимает свое исходное положение, опираясь роликом ЗЬ о рабочую повеохность шибера.
Шибер продолжает движение вверх и проталкивает деталь, окасзвшуюся середине на плоскости (см. фиг 4), до положения, показанного на фиг. 6, i, по срабатыванию датчика 34 реверсируется п обратном направлении, а деталь, удерлмаа- емая рабочей поверхностью 30 (выполненной из фрикционного материала), остается неподвижной за счет клинящгх свойств механизма удержания, расположенного под углом к рабочей плоскости шибера, т е. сила трения детали с поверхностью 30 (при ходе шибера вниз) всегда будет больше силы т рения детали с плоскостью шибе|. з.
Сброс детали с механизма удерхания начинается при подходе сверху механизме) сброса (фиг. 19) и производится следующим образом. Наклонный склиз 23 нг i ыкаясь на ролик 35, отклоняется по оси 22 пропускает через себя верхний край детали 61 и, когда ролик 24 пройдет через течку контакта детали 61 с фрикционной поверхностью 30 стремясь вернуться в исходное положена под действием пружины 25, подсекает нижний край детали 61 и опрокидывает ее на себя (см. фиг. 7). Дальше деталь по наклонному склизу соскальзывает в лоток 40 до разделительной заслонки 42
Попав в зону обзора на наклонном лотке, система управления определяет сторону прилегания детали и формирует режим работы разделительной заслонки 42 (фиг. 8, 14).
Если деталь прилегает к поверхности лотка 40 правильной стороной, то дается команда приводу 49 заслонки 42 и она приподнимается, поворачиваясь относительно оси 44, пропускает деталь к лотку 41 (фиг. 10). Если деталь прилегает к поверхности лотка 40 обратной стороной, то даются поочередно команды сначала приводу 50.
При этом заслонка 42 опускается вниз, преодолев действие пружины 45 вставки 46 (см. фиг. 9) дегаль соскальзывает на повер хнпсгь заслонки 42 до буртика 43. а затем
после возврата привода 50 в исходное попо- /-.ение L слючае ся привод 49 заслонки 42 и деталь, оказавшись наверху заслонки, переворачивается и опять стороной ложится на дно нижней части лотка 41.
С лотка 41 деталь соскальзывает на холеную поверхность 58 трафарета Ь7 вибростола 56 (фиг. 11), куда ложится нужHOfi ьтОрОНОЙ,
С гонусной поверхности 58, в созокуп5 ногти сил инерции формы и микропереме- шенчй вибрирующего трафарета, деталь i.jodnbjb ЭОРТ в центр, описывается в ци- /и/мдрическое основание чаши 59 и приао- 4 i С i во еращени.з вокруг начала координат
i (Фиг. 12) Система управления следит за врэ- i (е 1мрг детали в основании чзши 59 и, как О 1 i деталь займет правильное положение (см фиг. 13) относительно начала коор- дмнл. отключается привод вибростола.
Г Формула изобретения
1. Устройство для подачи штучных заготовок, содержащее установленный на основании бункер с выходным окном, наклонный шибер, механизм поштучной
0 выд&чи заготовок из бункера, установленный ме/кду окном б/нкера и шибером, узел chpocл заготовок с наклонным склизом, о т- i и i а ю щ е е с я тем, что, с целью порыше- нпя надежности, оно снабжено механизмом
5 у irp-лачия заготовок и удаления их на узел сброса, установленным в верхней части шибера и выполненным в виде вертикального ва ia подпружиненной каретки, установленной чл вагу с возможностью возвратно-по0 сгупаге/ibnoro перемещения ограничителя, шарнирно закрепленного на каретке, узел сброса выполнен о виде валика, закрепленного на конце наклонного склиза с воз- моч. юс.ыо взаимодействия с щупом, при
5 о i о, 1 илклонный склиз шарнирно связан с оси знанием, а второй конец склиза под- г ружинс1 , а каретка nai-понена относи- тильно плоскости шибера.
2 Ус i ройство поп. 1, о т л и ч а ю щ е е0 с я тем, что оно снабжено механизмом ори- г тироь-ания деталей, выполненным в виде ь-,.,лсниых лотков и заслонки с буртиком на конце, оасположенной между ними с возможностью поворота.
53 Устройство по п. 2, отличающеео я -ом, что механизм ориентирования вы- г, j/шем о виде вибростола и трафарета, ус- такоьлогмого на столе.
Л
56
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1990 |
|
SU1774910A3 |
| УСТРОЙСТВО ПОДАЧИ ДЕТАЛЕЙ | 2013 |
|
RU2533980C1 |
| Загрузочное устройство | 1991 |
|
SU1814607A3 |
| Загрузочное устройство | 1988 |
|
SU1604557A1 |
| Устройство для загрузки деталей в сотовые кассеты | 1980 |
|
SU929395A1 |
| Автоматическая линия для индукционной термической обработки плоских деталей | 1981 |
|
SU1018983A1 |
| Трубогибочный станок | 1984 |
|
SU1378982A1 |
| Устройство для порядной выдачи плиток двух цветов | 1975 |
|
SU570503A1 |
| Устройство для снятия заусенцев с вкладышей подшипников скольжения и очистки их наружной поверхности | 1985 |
|
SU1297994A1 |
| Станок для правки пластин | 1989 |
|
SU1706761A1 |
Изобретение относится к автоматизации загрузки листовых заготовок перед их обработкой и может быть использовано в робототехнических комплексах штамповки. Устройство выполнено в виде качающегося бункера с наклонным шибером, в верхней части которого установлен механизм удержания заготовок, состоящий из каретки, установленной с возможностью возвратно-поступательного перемещения в вертикальной плоскости, и механизма сброса заготовок. Устройство переворота детали по стороне выполнено в виде наклонных лотков с заслонкой, на которой смонтирован буртик, а приводной стол выполнен вибрирующим и имеет трафарет в виде чаши с основанием. 2 з.п.ф-лы, 19 ил.
Фиг. 2
Ч
Ч
6- 6повернуто
36
Фиг. 6
21
SI
Фиг. 7
8идГ
40
42
L
1
фиг.8
to
45
#
4J
4
#
J
fe
4f
Щи г. 12
Фиг. 11
фиг. 13
61
tt
19
15
16
8
Фиг. 15
20
г/
Фиг.17
Я
п
21
| Устройство для ориентации и поштучной выдачи цилиндрических заготовок | 1984 |
|
SU1230730A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
