Изобретение относится к устройствам блокировки механических систем управления, в частности к блокируемым рычажным механизмам управления, преимущественно гусеничной снегоуплотняющей машины. .
Цель изобретения - повышение удобства эксплуатации.
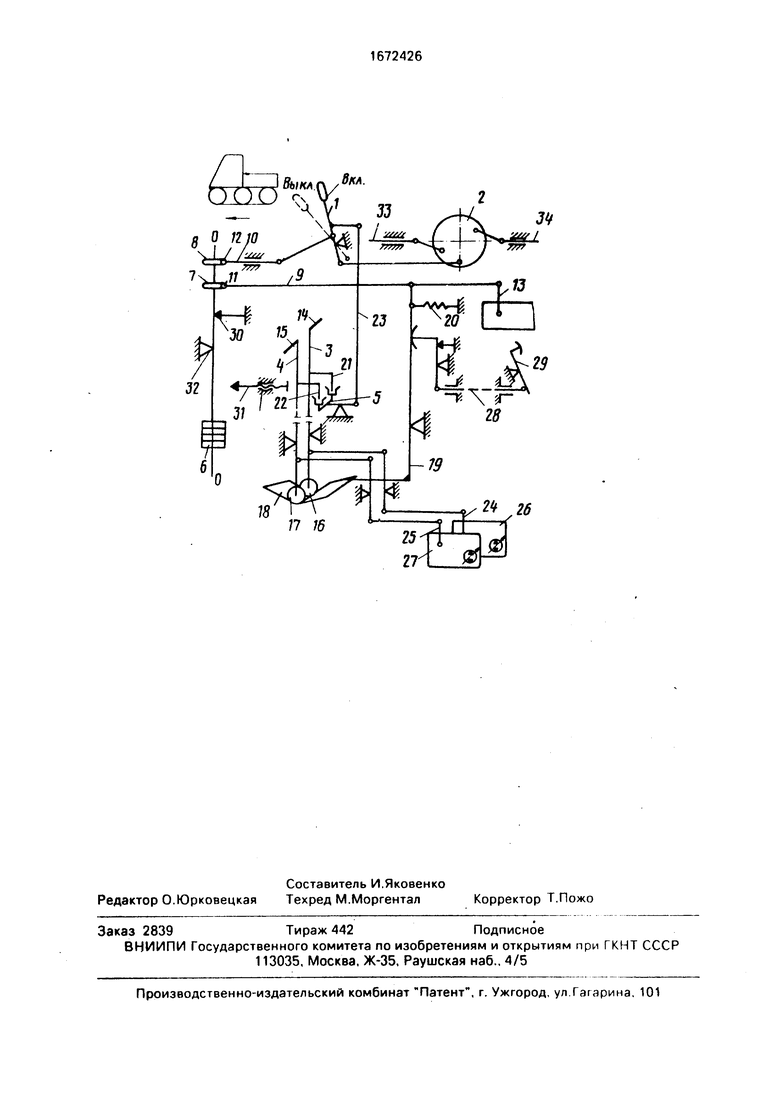
На чертеже представлена кинематическая схема блокируемого рычажного механизма.
Блокируемый рычажный механизм управления строительно-дорожной машины содержит рычаг 1 управления стояночным тормозом 2. рычаги 3, 4 управления ходом, машины, узел 5 блокировки рычагов .3, 4, который кинематически связан с рычагом 1, маятниковый датчик 6 положения машины с первым 7 и вторым 8 концевыми элементами с пазом, первую 9 и вторую 10 тяги с пальцами 11 и 12 на их свободных концах. Первая тяга 9 связывает между собой маятниковый датчик 6, рычаги 3. 4 управления и рычаг 13 управления топливоподачей силовой установки, например двигателя внутреннего сгорания Рычаги 3, 4 управления выполнены двуплечими, их верхние части снабжены рукоятками 14. 15, а нижние - опорными элементами 16, 17, которые при повороте рычагов 3 и 4 взаимодействуют с фигурным желобом 18. Фигурный желоб 18 жестко прикреплен к одному концу двуплечего изогнутого рычага 19. другой конец которого шарнирно связан с первой тягой 9. Изогнутый рычаг 19 подпружинен пружиной 20. которая обеспечивает прижим фигурного желоба 18 к опорным элементам 16. 17
О
sj
ю ь
ho
о.
рычагов 14, 15. Рычаги 3 и 4 посредством жестко связанных с ними штырей 21 и 22 взаимодействуют с ловителями узла 5 блокировки, который, в свою очередь, через тягу 23 образует кинематическую связь с рычагом 1 стояночного тормоза. Одновременно рычаги 3 и 4 управления кинематически связаны с рычагами 24, 25 управления регулируемыми гидронасосами 26, 27. бортовых передач машины. Для обеспечения возможности принудительного управления силовой установкой (например, при возникновении аварийной ситуации, заедания отдельных элементов рычажного механизма и т.д.), предусмотрено наличие дополнительной кинематической связи 28 двуплечего изогнутого рычага 19 с педалью 29. Кроме того, маятниковый датчик снабжен нерегулируемым упором 30 и регулируемым упором 31, расположенными по разные стороны относительно шарнира 32 его подвески. Стояночный тормс 2 выполнен в виде кривошипно-шатунного механизма, шатуны которого заканчиваются пальцами 33, 34, выходящими в отверстия диска (на чертеже не показан), связанного с движителями машины и препятствующими повороту диска при включении стояночного тормоза.
Блокируемый рычажный механизм строительно-дорожной машины работает следующим образом.
Перед началом движения водитель переводит рычаг 1 стояночного тормоза из положения Включено в положение Выключено. При этом происходит растор- маживание машины путем вывода пальцев 33, 34 из отверстий диска, связанного с движителем машины. Одновременно с этим рычаг 1, воздействуя через тягу 23 на узел 5 блокировки, выводит из взаимодействия ловители узла 5 со штырями 21, 22. Рычаги 3, 4 управления разблокируются. Поскольку рычаг 1 стояночного тормоза также связан через тягу 10 и с концевым элементом 8 маятникового датчика 6, то перевод рычага 1 в положение Выключено позволяет освободить маятниковый датчик 6 путем перемещения пальца 12 из крайнего правого положения внутрь паза. Маятниковый датчик 6 получает возможность поворота отно- сительно шарнира его крепления в продольной плоскости машины. Благодаря наличию нерегулируемого упора 30, маятниковый датчик 6 может поворачиваться относительно его нейтрального положения 0-0 только против часовой стрелки. Возможность поворота маятникового датчика только против часовой стрелки обусловлена следующим. При нахождении машины на
горизонтальной площадке или при ее наклоне вниз своим передом необходимость увеличения топливоподачи в двигатель перед троганием отсутствует и значение топливоподачи в этот момент соответствует минимальным устойчивым оборотам холостого хода. Трогание машины из этого положения осуществляется путем перемещения рычагов 3 и 4 из их нейтрального положения.
0 Перемещаясь, рычаги 3, 4 одновременно воздействуют ыа рычаги 24, 25 управления регулируемыми гидронасосами 26, 27 и на фигурный желоб 18. При этом вне зависимости от направления перемещения рычагов 3
5 и 4 желоб 18 благодаря своей конфигурации всегда отклоняется вниз. т.е. в одном направлении, заставляя двуплечий изогнутый рычаг 19 также поворачиваться только против часовой стрелки. Это. в свою очередь,
0 обеспечивает при любом направлении движения машины пропорциональное увеличение топливоподачи (перемещение рычага 13) в зависимости от изменения рабочих объемов регулируемых гидронасосов 26, 27.
5При нахождении машины на уклоне, с
расположением своей передней частью вверх, необходимо перед троганием увеличить топливоподачу. так как в противном случае двигатель заглохнет. Такое увеличе0 ние, причем пропорциональное увеличение уклона в блокируемом рычажном механизме, обеспечивается автоматически сразу же после выключения стояночного тормоза. В этом случае маятниковый датчик, преодоле5 вая усилие пружины 20, перемещается против часовой стрелки, увлекая за собой тягу 9, которая, воздействуя на рычаг 13, перемещает последний в сторону увеличения подачи топлива. При этом двуплечий изогнутый
0 рычаг 19, увлекаемый тягой 9, также поворачивается против часовой стрелки, выводя из контакта с опорными элементами 16. 17 фигурный желоб 18. Рычаги управления 3 и 4 сохраняют в этом случае нейтральное поло5 жение за счет штатных нуль-установителей регулируемых гидронасосов 26. 27. Регулируемый упор 31 позволяет установить такой максимальный поворот маятникового датчика, при котором значение топливоподачи
0 будет достаточным для надежного трогания машины с места; но не будет происходить бессмысленный перерасход топлива, превышающий расход. После трогания с места набор скорости осуществляется дальней5 шим перемещением рычагов 3 и 4, которые при достаточном перемещении вновь начинают контактировать своими оперными элементами 16 и 17 с фигурным желобом 18, воздействуя одновременно и на рычаг 13 управления силовой ус гановкой и на рычаги
24. 25 управления гидронасосов 26, 27. В случае, когда машина стоит на поверхности с уклоном вниз, но требуется по каким-либо причинам воспользоваться педалью 29 и увеличить подачу топлива в момент трога- ния вручную. В момент остановки машины водитель переводит рычаги 3, 4 управления в нейтральное положение, что обеспечивается как пружиной 20, так и штатными нуль-установителями регулируемых гидронасосов 26,27. После этого рычаг 1 стояночного тормоза переводят в положение Включено путем его поворота по часовой стрелке. При этом рычаг 1 увлекает за собой тягу 10, которая пальцем 12, размещенным в пазу концевого элемента 8, принудительно переводит маятниковый датчик 6 в нейтральное положение, давая возможность пальцу 11 и. значит, тяге 9 переместиться в крайнее правое положение под действием пружины 20, что соответствует минимальной подаче топлива, обеспечивающей устойчивую работу двигателя на холостом ходу. Одновременно с этим рычаг 1 переводит узел блокировки 5 в положение, при котором его ловители обхватывают штыри 21 и 22, блокируя тем самым рычаги 3. 4 управления, и перемещает кривошипно-ша- тунный механизм стояночного тормоза в положение, при котором пальцы 33. 34 выходят из отверстий дисков, связанных с движителем машины.
Таким образом, блокируемый рычажный механизм обеспечивает не только надежное затормаживание машины, но и
блокировку рычагов управления от их не-. преднамеренного перемещения с одновременным обеспечением автоматического перевода топливоподачи в положение, соответствующее минимальной топливоподаче устойчивых оборотов холостого хода при включении стояночного тормоза и увеличенной топливоподаче перед началом движения машины на уклон.
Ф о р м у л а и з о б р е т е н и я
Блокируемый рычажный механизм управления строительно-дорожной машины, содержащий двигатель внутреннего сгора- ния-с рычагом управления топливоподачей.
рычаг управления стояночным тормозом и рычаги управления ходом машины, снабженные узлом их блокировки и кинематически связанное с рычагом управления стояночным тормозом, отличающийся
тем, что, с целью повышения удобства эксплуатации, механизм снабжен маятниковым датчиком положения машины, выполненным в виде двуплечего рычага, на одном конце которого размещен груз, а на
другом - первый и второй концевые элементы с пазами и установленным с возможностью его качания в продольной плоскости машины, первой и второй тягой с пальцами, сопряженными с пазами концевых элементов. причем первая тяга связывает между собой маятниковый датчик, рычаги управления и рычаг управления топливоподачей, вторая тяга связывает между собой маятниковый датчик с рычагом стояночного тормоза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления гидрообъемной трансмиссией | 1989 |
|
SU1756181A1 |
| Блокируемый рычажный механизм управления строительно-дорожной машины | 1987 |
|
SU1449981A1 |
| Устройство управления транспортным средством | 1989 |
|
SU1705143A1 |
| Рычажный механизм управления для автодорожного шасси с ходоуменьшителем | 1990 |
|
SU1729840A1 |
| Механизм управления ходом транспортного средства с откидывающейся кабиной | 1987 |
|
SU1449376A1 |
| Механическая система управления ходоуменьшителем автодорожного шасси | 1990 |
|
SU1750990A1 |
| Устройство управления гидрообъемной трансмиссией транспортной машины с бортовым поворотом | 1987 |
|
SU1449377A1 |
| Устройство для управления гусеничным транспортным средством | 1986 |
|
SU1556948A1 |
| Трансмиссия шасси для ремонта и содержания дорог | 1988 |
|
SU1627427A1 |
| Механизм управления рабочим оборудованием малогабаритной землеройно-транспортной машины с поворотной кабиной | 1987 |
|
SU1460146A1 |
Изобретение относится к устройствам блокировки механических систем управления, в частности к блокируемым рычажным механизмам управления строительно-дорожными машинами, в том числе гусеничными снегоуплотняющими машинами. Цель изобретения - повышение удобства эксплуатации. В устройстве введен маятниковый датчик 6 с грузом и концевыми элементами с пазами, выполненный в виде двуплечего рычага с шарниром 32. Концевые элементы связаны с пальцами 11 и 12 тяг 9 и 10. Первая тяга 9 связывает датчик 6 с рычагами 3 и 4 управления ходом машины и рычагом 13 силовой установки топливвоподачи. Вторая тяга 10 связывает датчик 6 с рычагом 1 управления стояночным тормозом. Устройство обеспечивает надежное затормаживание машины, блокировку рычагов управления, регулирование топливоподачи перед началом движения машины на уклон. 1 ил.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
