Изобретение относится к робототехнике, в частности к промышленным роботам, оснащенным захватными устройствами с быстросменными губками.
Цель изобретения - упрощение и повышение жесткости конструкции.
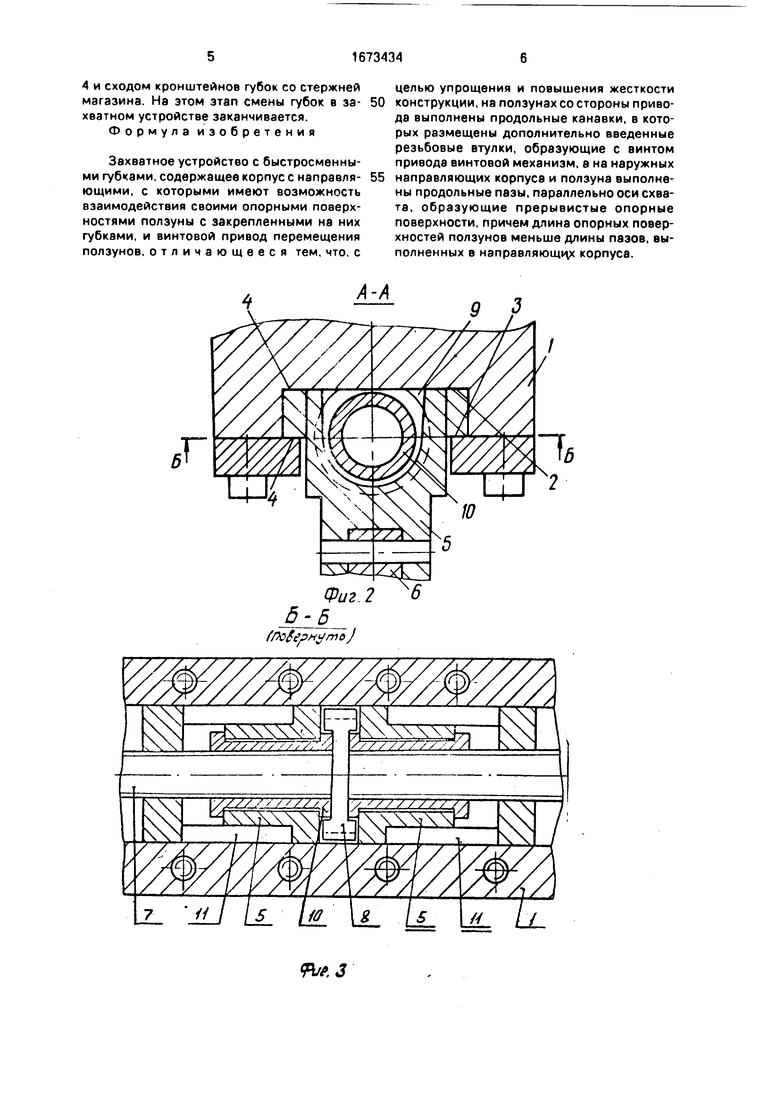
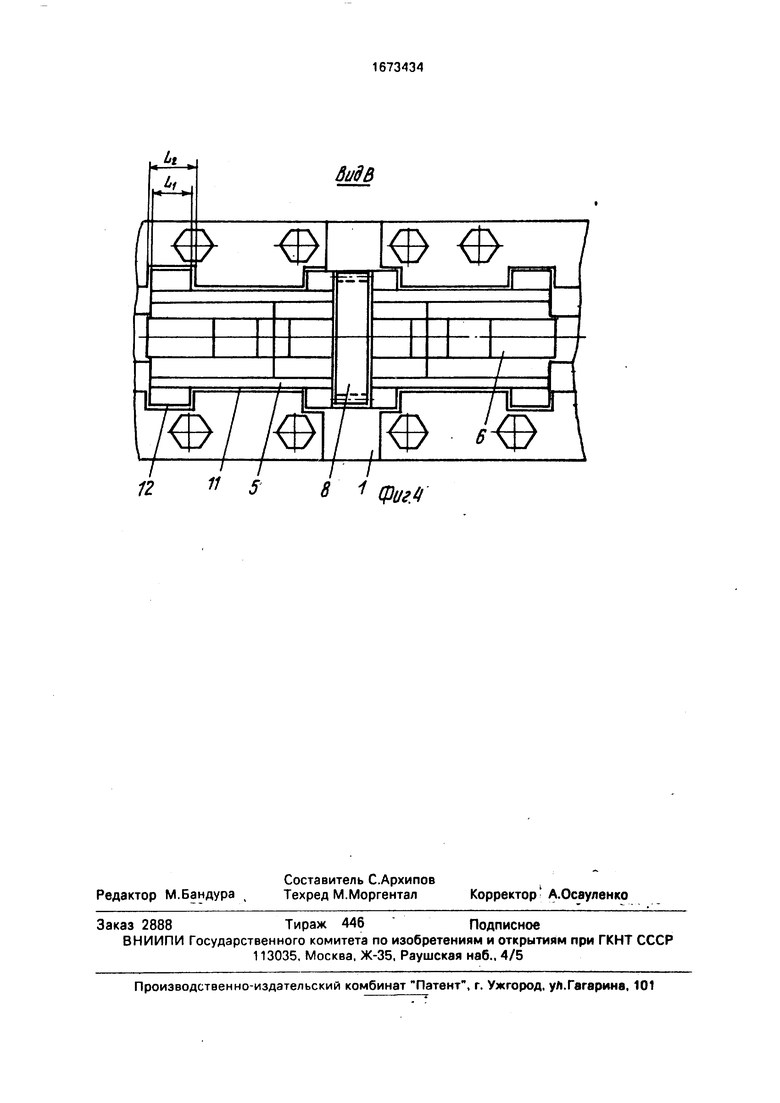
На фиг. 1 изображено захватное устройство с быстросменными губками, взаимодействующее с магазином сменных губок; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг, 2; на фиг. 4 - вид В на фиг. 1.
Захватное устройство с быстросменными губками содержит корпус 1 с внутренними и наружными направляющими 2, 3 соответственно, на которых смонтированы своими направляющими 4 ползуны 5 с неподвижно закрепленными на них губками б, и привод перемещения ползунов 5, заканчивающийся винтом 7 с шестерней 8. На ползунах 5 со стороны корпуса 1 выполнены продольные канавки 9, в которых размещены резьбовые втулки 10 с буртиками, образующие с винтом 7 привода винтовой механизм. На направляющих 4 ползунов 5 и наружных направляющих 3 корпуса 1 выполнены пазы, соответственно 11 и 12, образующие на них прерывистые опорные поверхности, причем длина опорных поверхностей ползунов 5 несколько меньше длины 1г пазов 12, выполненный на направляющих 3 корпуса 1.
Магазин сменных губок содержит стержни 13 и 14, взаимодействующие с губками 6, на которых для этого укреплены кронштейны 15 с отверстиями и выполнены пазы 16.
Захватное устройство с быстросменными губками работает следующим образом.
В исходном положении захватное устройство оснащено сменными губками 6, неподвижно скрепленными с ползунами 5. Для смены их захватное устройство подводится к магазину сменных губок, совмещая оси отверстий в кронштейнах 15 с осью стержня 13 накопителя. Включением привода движения губок 6 вращают винт 7. От этого вращения резьбовые втулки 10, со
ставляющие с винтом 7 винтовой механизм, сходятся к центру винта 7, упираясь торцами в шестерню 8. Это движение резьбовых втулок 10 сопровождается движением ползунов 5 по внутренним и наружным направляющим, соответственно 2 и 3, и попаданием отверстий кронштейнов 15 губок 6 и пазов 16 соответственно на стержни 13 и 14 магазина. После упора резьбовых втулок 10 в
шестерню 8 губки оказываются установленными на стержнях 13 и 14 магазина, а опорные поверхности направляющих 4 ползунов 5 располагаются против пазов 12 в наружных направляющих 3 (фиг. 2) корпуса 1.
Движением захватного устройства в направлении своей оси корпус 1 с винтом 7 и резьбовыми втулками 10 выводится из соединения с ползунами 5, на которых закреплены сменные губки 6. При этом винт 7
привода захватного устройства с резьбовыми втулками 10 выходит из продольных пазов 9 (фиг. 2) ползунов 5, а корпус 1 с направляющими 2 и 3 - из соединения с ползунами 5 (за счет того, что длина Li опорных поверхностей ползунов 5 меньше длины 1.2 пазов 12 в направляющих 3 корпуса 1). Сменные губки 6, закрепленные на ползунах 5, оказываются установленными вме- сте-с этими ползунами на стержнях 13 и 14
магазина сменных губок.
Для установки сменных губок захватное устройство перемещают в обратном направлении к магазину губок. При этом направляющие 4 ползунов 5 попадают в пазы
12 направляющих 3 корпуса 1, а винт 7 с резьбовыми втулками 10 - в продольные канавки 9 ползунов 5. Перемещение захватного устройства продолжается до упора направляющих 4 ползунов 5 во внутренние
направляющие 2 корпуса 1.
После остановки захватного устройства включением привода ползунов 5 вращают винт 7. От этого вращения резьбовые втулки 10, составляющие с винтом 7 винтовой механизм, расходятся от центра винта 7. Это движение резьбовых втулок 10 сопровождается движением ползунов 5 по направляющим 2, 3 корпуса 1 своими направляющими
4 и сходом кронштейнов губок со стержней магазина. На этом этап смены губок в за- хватном устройстве заканчивается. Формула изобретения
Захватное устройство с быстросменными губками, содержащее корпус с направля- ющими, с которыми имеют возможность взаимодействия своими опорными поверхностями ползуны с закрепленными на них губками, и винтовой привод перемещения ползунов, отличающееся тем, что, с
целью упрощения и повышения жесткости конструкции, на ползунах со стороны привода выполнены продольные канавки, в которых размещены дополнительно введенные резьбовые втулки, образующие с винтом привода винтовой механизм, а на наружных направляющих корпуса и ползуна выполнены продольные пазы, параллельно оси схва- та, образующие прерывистые опорные поверхности, причем длина опорных поверхностей ползунов меньше длины пазов, выполненных в направляющи корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1473943A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Зажимное приспособление металлорежущего станка | 1984 |
|
SU1296393A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Устройство для сборки шарнирного соединения секаторов | 1983 |
|
SU1271702A1 |
| Винтоверт | 1982 |
|
SU1030154A1 |
| Схват | 1989 |
|
SU1701516A1 |
Изобретение относится к робототехнике, в частности к промышленным роботам, оснащенным захватными устройствами с быстросменными губками. Цель изобретения - упрощение и повышение жесткости конструкции. Захватное устройство содержит корпус 1, в направляющих которого размещены ползуны 5, на которых жестко смонтированы губки 6. На ползунах выполнены продольные канавки, в которых размещены резьбовые втулки 10, образующие с винтом 7 привода винтовой механизм. Наружные направляющие корпуса имеют пазы, параллельные оси схвата и смещенные к центру схвата, образующие прерывистые опорные поверхности, причем длина опорных поверхностей ползунов меньше длины пазов, выполненных в направляющих корпуса. Для смены губок захват подводится к магазину сменных губок. Губки 6 посредством привода смещаются к центру схвата, при этом захват устанавливается и фиксируется в магазине, а опорные поверхности ползунов 5 оказываются над пазами в направляющих корпуса. Перемещая корпус вверх вдоль оси схвата губки с ползунами освобождаются от зацепления. Стыковка губок происходит в обратном порядке. 4 ил.
Фиг 2
fflotepHymoJ
Рие.З
А-А
Вида
V 5
8 1 фигц
| Захватное устройство | 1985 |
|
SU1305029A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
