Изобретение относится к гальванотехнике и может-быть использовано для управления линиями гальванопокрытий.
Цель изобретения - сокращение вычислительных ресурсов путем снижения объема памяти вычислительного устройства системы управления транспортными роботами.
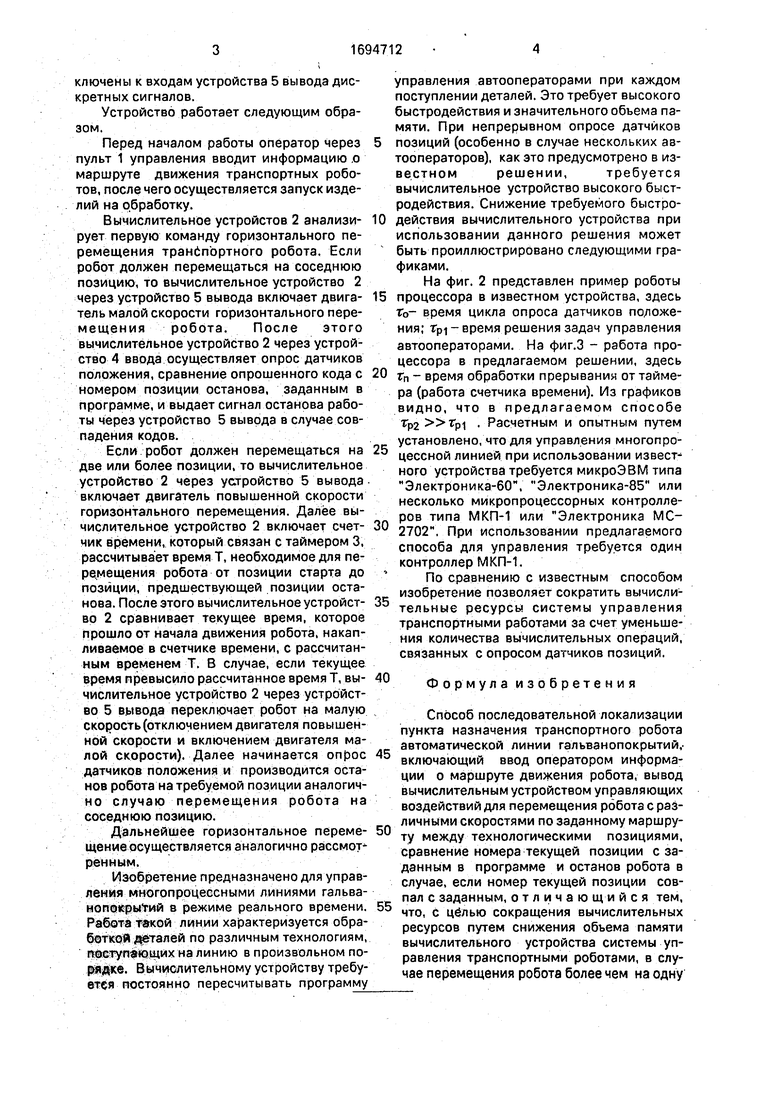
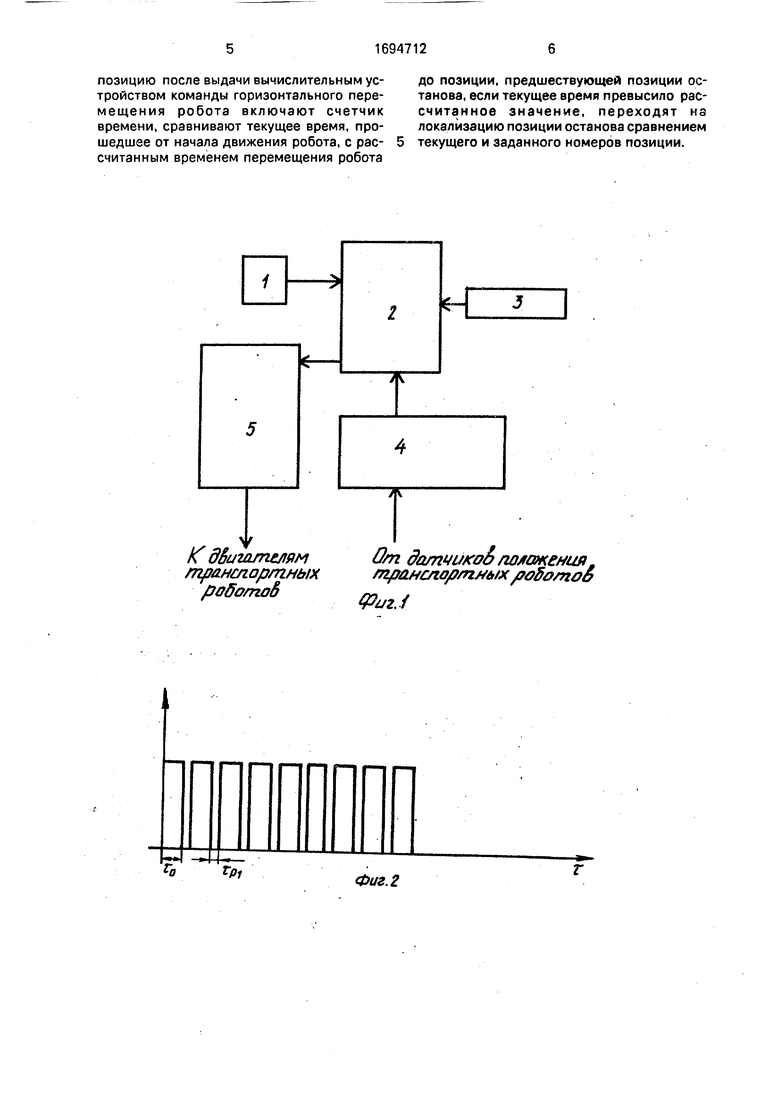
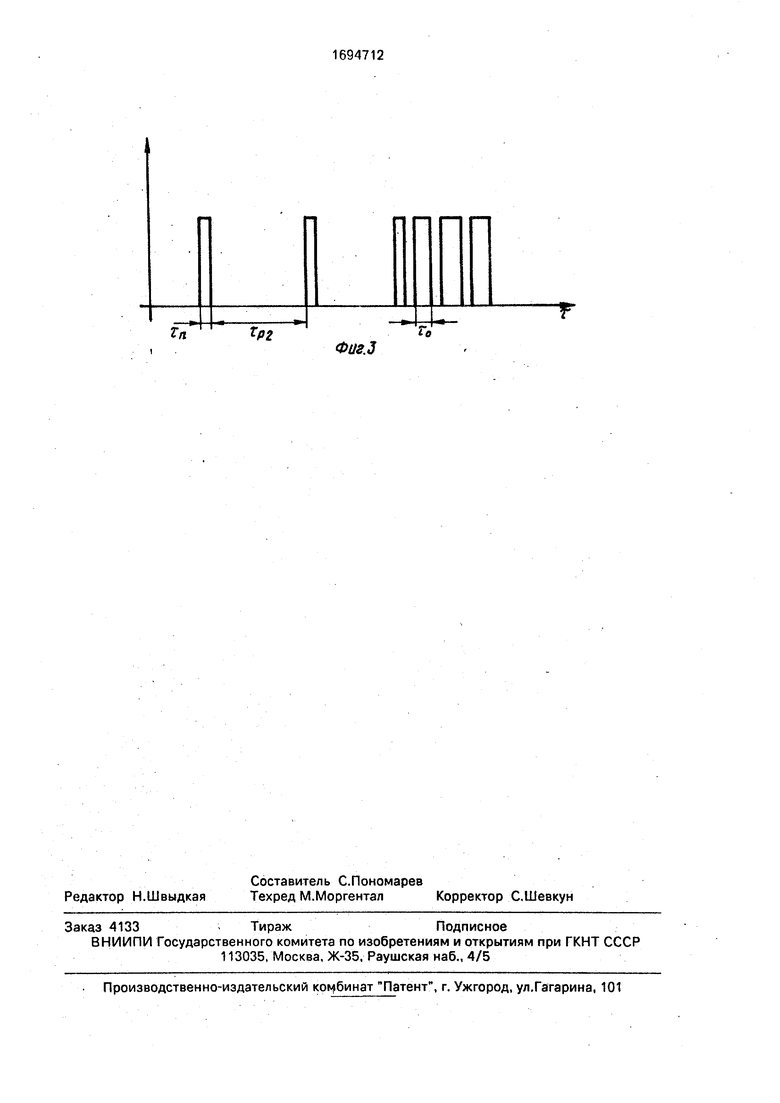
На фиг.1 представлена структурная схема устройства, реализующая данный способ; на фиг.2 - пример работы процессора в
.известном устройстве; на фиг.З - пример работы процессора по предложенному способу.
Устройство содержит пульт 1 управления, вычислительное устройство 2, таймер 3, устройство 4 ввода дискретных сигналов, устройство 5 вывода дискретных сигналов. Входы вычислительного устройства 2 соеди нены с выходами пульта 1, таймера 3 и устройства 4 ввода дискретных сигналов. выходы вычислительного устройства 2 подЮ
ключены к входам устройства 5 вывода дискретных сигналов.
Устройство работает следующим образом.
Перед началом работы оператор через пульт 1 управления вводит информацию о маршруте движения транспортных роботов, после чего осуществляется запуск изделий на обработку.
Вычислительное устройстов 2 анализирует первую команду горизонтального перемещения транЬп ортного робота. Если робот должен перемещаться на соседнюю позицию, то вычислительное устройство 2 через устройство 5 вывода включает двигатель малой скорости горизонтального пере- мещения робота. После этого вычислительное устройство 2 через устройство 4 ввода осуществляет опрос датчиков положения, сравнение опрошенного кода с номером позиции останова, заданным в программе, и выдает сигнал останова работы через устройство 5 вывода в случае совпадения кодов.
Если робот должен перемещаться на две или более позиции, то вычислительное устройство 2 через устройство 5 вывода включает двигатель повышенной скорости горизонтального перемещения. Далее вычислительное устройство 2 включает счетчик времени, который связан с таймером 3, рассчитывает время Т, необходимое для перемещения робота от позиции старта до позиции, предшествующей позиции останова. После этого вычислительное устройство 2 сравнивает текущее время, которое прошло от начала движения робота, накапливаемое в счетчике времени, с рассчитанным временем Т. В случае, если текущее время превысило рассчитанное время Т, вычислительное устройство 2 через устройство 5 вывода переключает робот на малую скорость (отключением двигателя повышенной скорости и включением двигателя малой скорости). Далее начинается опрос датчиков положения и производится останов робота на требуемой позиции аналогич- но случаю перемещения робота на соседнюю позицию.
Дальнейшее горизонтальное перемещение осуществляется аналогично рассмот ренным.
Изобретение предназначено для управления многопроцессными линиями гальванопокрытий в режиме реального времени. Работа такой линии характеризуется обработкой деталей по различным технологиям, поступающих на линию в произвольном порядке. Вычислительному устройству требуется постоянно пересчитывать программу
управления автооператорами при каждом поступлении деталей. Это требует высокого быстродействия и значительного объема памяти. При непрерывном опросе датчиков
позиций (особенно в случае нескольких автооператоров), как это предусмотрено в известномрешении,требуется вычислительное устройство высокого быстродействия. Снижение требуемого быстро0 действия вычислительного устройства при использовании данного решения может N быть проиллюстрировано следующими графиками.
На фиг. 2 представлен пример роботы
5 процессора в известном устройства, здесь Т0- время цикла опроса датчиков положения; ГР1 - время решения задач управления автооператорами. На фиг.З - работа процессора в предлагаемом решении, здесь
0 гп - время обработки прерывания от таймера (работа счетчика времени). Из графиков видно, что в предлагаемом способе ГР2 7р1 . Расчетным и опытным путем установлено, что для управления многопроцессной линией при использовании известного устройства требуется микроЭВМ типа Электроника-60, Электроника-85 или несколько микропроцессорных контроллеров типа МКП-1 или Электроника МС® 2702. При использовании предлагаемого способа для управления требуется один контроллер МКП-1.
По сравнению с известным способом изобретение позволяет сократить вычисли5
5
0
5
0
5
тельные ресурсы системы управления транспортными работами за счет уменьшения количества вычислительных операций, связанных с опросом датчиков позиций.
Формула изобретения
Способ последовательной локализации пункта назначения транспортного робота автоматической линии гальванопокрытий,- включающий ввод оператором информации о маршруте движения робота, вывод вычислительным устройством управляющих воздействий для перемещения робота с различными скоростями по заданному маршруту между технологическими позициями, сравнение номера текущей позиции с заданным в программе и останов робота в случае, если номер текущей позиции совпал с заданным, отличающийся тем, что, с целью сокращения вычислительных ресурсов путем снижения объема памяти вычислительного устройства системы управления транспортными роботами, в случае перемещения робота более чем на одну
позицию после выдачи вычислительным устройством команды горизонтального перемещения робота включают счетчик времени, сравнивают текущее время, прошедшее от начала движения робота, с рассчитанным временем перемещения робота
до позиции, предшествующей позиции останова, если текущее время превысило рас- считанное значение, переходят на локализацию позиции останова сравнением текущего и заданного номеров позиции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления многопроцессной линией гальванопокрытий | 1976 |
|
SU653308A1 |
| Система управления многопроцессной линией гальванопокрытий | 1988 |
|
SU1534105A1 |
| Многопроцессная линия гальванических покрытий | 1988 |
|
SU1585396A1 |
| Система управления многопроцессной линией гальванопокрытий | 1982 |
|
SU1063870A2 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Многопроцессная линия гальванопокрытий | 1990 |
|
SU1770461A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| Устройство для управления автооператорами гальванических линий | 1979 |
|
SU877474A1 |
Изобретение относится к гальванотехнике и может быть использовано для управления линиями гальванопокрытий. Цель изобретения - сокращение вычислительных ресурсов путем снижения объема памяти вычислительного устройства. В способе последовательной локализации позиции назначения транспортным роботом автоматической линии гальванопокрытий, включающем ввод оператором информации о маршруте движения робота, вывод вычислительным устройством управляющих воздействий для перемещения работа с различными скоростями по заданному маршруту между технологическими позициями, сравнение номера текущей позиции с заданным в программе и останов робота в случае, если номер текущей позиции совпал с заданным, после начала горизонтального перемещения робота включают счетчик времени, сравнивают текущее время, прошедшее от начала движения робота, с рассчитанным временем перемещения робота до позиции, предшествующей позиции ос- танова, если текущее время превысило рассчитанное значение, переходят на локализацию позиции останова сравнением текущего и заданного номеров позиции. Сокращение вычислительных ресурсов достигается за счет уменьшения количества вы: числительных операций, связанных с опросом датчиков позиций. 3 ил. f&tt&fS L О ю 4
Кдбигшпеяям транспортных роботоб
Ч
От датчиков положения /пр&н&гортяых /}05о/пйо
Фиг.1
Фиг. 2
Тп
Tpz
Фиг.З
т0
| Устройство управления автооператорами линий гальванопокрытий | 1985 |
|
SU1305202A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
