Направление подачи
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| Устройство для шаговых перемещений груза | 1988 |
|
SU1583332A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| АВТОМАТ ДЛЯ СБОРКИ | 1992 |
|
RU2005586C1 |
| Устройство приемно-передаточное | 1990 |
|
SU1733366A1 |
| ЭЛЕВАТОР | 1998 |
|
RU2149130C1 |
| Транспортная тележка полуавтоматической линии сборки червячных редукторов | 1979 |
|
SU856755A1 |
| Установка для сборки резинотехнических изделий | 1980 |
|
SU971666A1 |
| ЗАЖИМ ДЛЯ КАНАТА | 1990 |
|
RU2022181C1 |
Изобретение относится к устройствам для шагового перемещения груза. Цель - повышение точности перемещения груза. На основании расположена неподвижная рама в виде двух параллельно расположенных неподвижных шин (Ш). С возможностью перемещения по основанию установлен приводной тяговый орган 2 для перемещения груза 3. Механизм останова груза выполнен в виде двух подпружиненных относительно Ш параллельных тяг (Т) 5 с продольными пазами. На Т 5 закреплены два ряда колодок 15 с вертикальными фиксаторами 16, подпружиненными для взаимодействия с грузом 3. На Ш размещены опоры 4, которые расположены в пазах с возможностью взаимодействия с боковыми сторонами пазов. На Ш закреплен выключатель 13 с возможностью взаимодействия с Т 5. При перемещении груз 3 взаимодействует своей передней кромкой с фиксаторами 16 и двигает Т 5 в крайнее левое положение. Выключатель 13 дает команду на подъем груза 3. Под действием пружин 10 Т 5 возвращаются в исходное положение. Груз 3 опускается и продолжает движение до следующей позиции. 6 ил.
П firFlfe RMIT
ГГ7Т7
13 12 5 b 2
//
163
Фиг.1
f- Јь. Ну
5 ЛЛЛЛМ
I I I
15 Ю 11
Изобретение относится к машиностроению, в частности к технологическим машинам с устройствами прерывистого перемещения обрабатываемых деталей, и может быть широко использовано в любой отрасли народного хозяйства при выполнении технологических операций сварки, сборки, гмехобработ-1 ки и..т.д., с разновеликим шагом подачи деталей, а также в транспортных системах контрольно-измерительных автоматов.
Цель изобретения - повышение точности перемещения груза.
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - вид А на фиг.1; на фир. 3 - разрез Б-В на фиг. 2$ на фиг. 4 - разрез В-В на фиг. 3; на фиг.5 - разрез Г-Г на фиг. 2; на фиг. 6 - вид Д на фиг. 5.
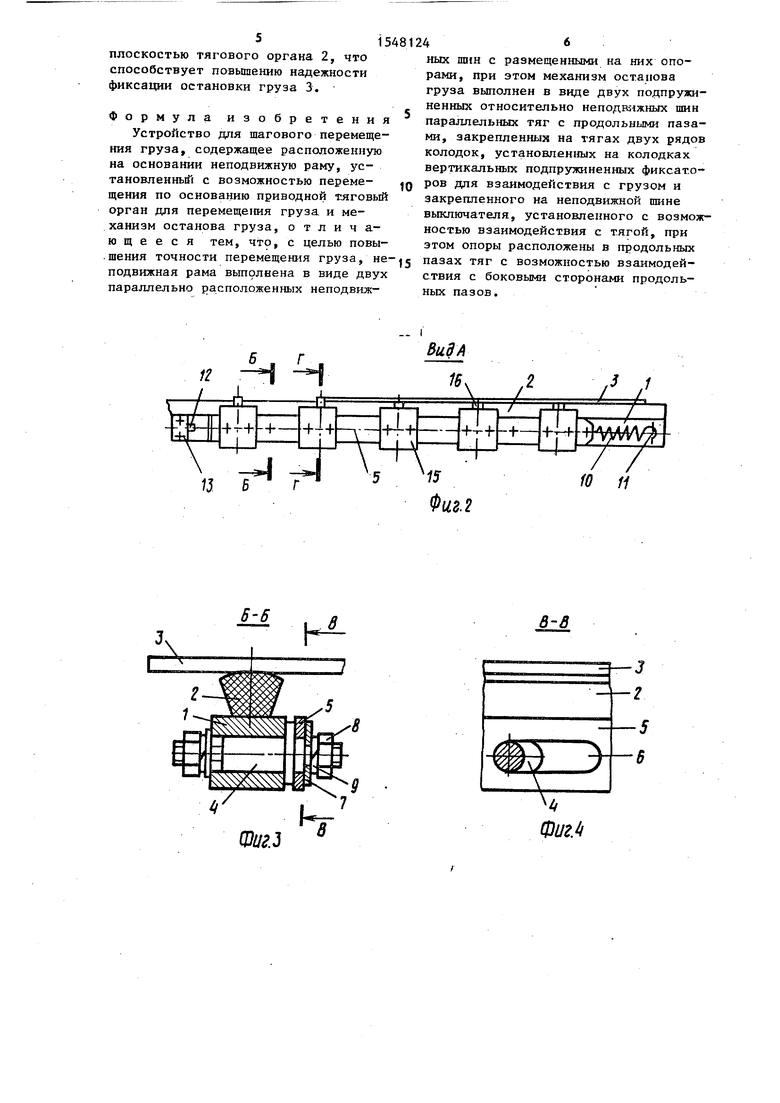
Устройство для шагового перемещения груза содержит расположенную на основании неподвижную раму в виде двух параллельно расположенных неподвижных шин 1, установленный с возможностью перемещения по основанию приводной тяговый орган 2 для перемещения груза 3. На неподвижных шинах 1 размещены опоры 4.
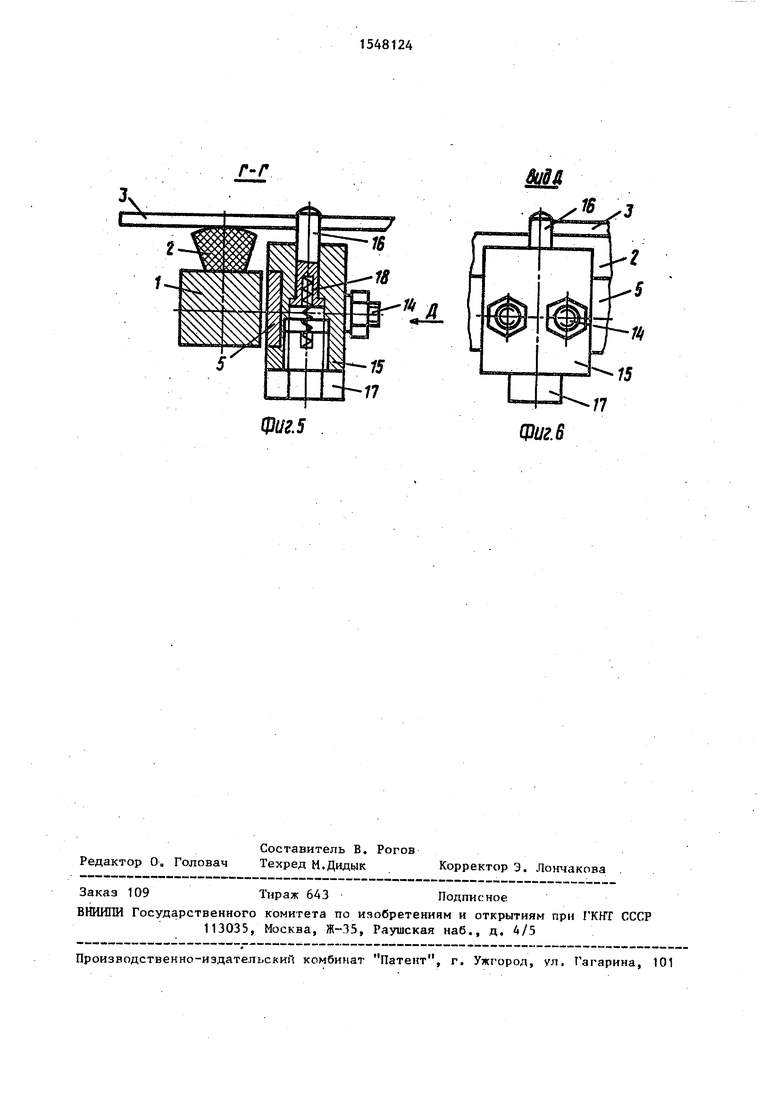
Механизм останова груза выполнен в виде двух подпружиненных относительно неподвижных шин 1 параллельных тяг 5 с продольными пазами 6. Опоры 4 расположены в продольных пазах 6 тяг 5 с возможностью взаимодействия с боковыми сторонами продольных пазов 6, Тяга 5 размещена между торцовой поверхностью опоры 4 и шайбой 7, прижатой гайкой .8 через шайбу 9. Тяги 5 подпружинены относительно неподвижных шин 1 пружиной 10, один конец которой закреплен на шине 1 штырьком 11. На шине 1 закреплен выключатель 13 с кнопкой 12, установленный с возможностью взаимодействия с тягой 5. На тягах 5 винтами 14 закреплены два ряда колодок 15 с вертикальными фиксаторами 16 для взаимодействия с грузом 3. Между болтом 17,„расположенным в отверстии колодки 15, и фиксаторами 16 размещена пружина 18. Колодки 15 размещены на тягах 5 на расстояниях, соответствующих шагу подачи деталей. Количество колодок 15 определяется количеством технологических операций, совершаемых с грузом 3.
Устройство работает следующим образом.
В исходном положении тяги 5 пружинами 10 оттянуты в крайнее правое положение и упираются левыми поверхкостями пазов 6 на опоры 4 (фиг. 4). Фиксаторы 16 под действием пружин 18 выведены из колодок 15 в крайнее верхнее положение. Груз 3 находится на поверхности тягового органа 2.
Затем тяговый орган 2 приводится в движение и перемещает груз 3. По ходу движения передняя кромка груза 3 взаимодействует с выступающими концами фиксаторов 16 и вместе с фикса5 торами 16 перемещаются колодки 15 с тягами 5. Движение продолжается до тех пор, пока правые концы пазов 6 в тягах 5 не упрутся в цилиндрические поверхности опор 4. Груз 3 останавлио вается, а движущийся тя гавый орган 2 проскальзывает по нижней опорной поверхности груза 3. Одновременно с остановкой груза 3 левые концы тяг 5 нажимают на кнопки 12 конечных вы5 ключателей 13, подающих электрический сигнал на подъем груза 3. Подъемный механизм (не показан) отрывает груз 3 от опоры движущегося тягового органа 2 и с грузом 3 выполняется технологическая операция (например, сварка). При подъеме груза 3 контакт между его передней кромкой и фиксаторами 16 колодок 15 нарушается и под действием пружин 10 тяги 5 возвращаются в крайнее правое положение. После выполнения технологической операции груз 3 устанавливается на движущийся тяговый орган 2. При этом фиксаторы 16 колодок 15, смещенные относительно кромки руза 3, оказываются под нижней поверхностью груза 3„ Под воздействием веса груза 3 пружины 18 деформируются, а фиксаторы 16 утапливаются в колодки 15. Затем движущийся тяговый орган 2 перемещает груз 3 до взаимодействия со следующими фиксаторами 16 колодок 15,после чего цикл повторяется.
Утапливаемые фиксаторы 16 не препятствуют движению груза 3. Колодки
0 15 с фиксаторам 16 можно расположить на расстояниях, обеспечивающих необходимый шаг подачи груза.3. Расположение неподвижных шин 1 параллельно друг к другу, относительно продоль5 ной оси подачи груза 3 устраняет разворот груза 3 при взаимодействии с подпружиненными фиксаторами 16, установленными выступающими над
0
5
0
5
плоскостью тягового органа 2, что способствует повышению надежности фиксации остановки груза 3.
Формула изобретения Устройство для шагового перемещения груза, содержащее расположенную на основании неподвижную раму, установленный с возможностью перемещения по основанию приводной тяговый орган для перемещения груза и механизм останова груза, отличающееся тем, что, с целью повышения точности перемещения груза, неподвижная рама выполнена в виде двух параллельно расположенных неподвиж13
6-6
OteJ
81246
ных шин с размещенными на них опорами, при этом механизм останова груза выполнен в виде двух подпружиненных относительно неподвижных шин параллельных тяг с продольными пазами, закрепленных на тягах двух рядов колодок, установленных на колодках вертикальных подпружиненных фиксатоIQ ров для взаимодействия с грузом и закрепленного на неподвижной шине выключателя, установленного с возможностью взаимодействия с тягой, при этом опоры расположены в продольных
15 пазах тяг с возможностью взаимодействия с боковыми сторонами продольных пазов.
jhfrw -/ /
Ю 11
3-3
J г
ФигА
Г-Л
Щи г. 5
J
Фиг. 6
| Устройство периодического действия для транспортирования плоских деталей | 1979 |
|
SU866939A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| i | |||
