Изобретение относится к станкостроению и может быть использовано для автоматизации технологических процессов.
Цель изобретения - расширение функциональных возможностей устройства при ориентации деталей с микровыступами на поверхности.
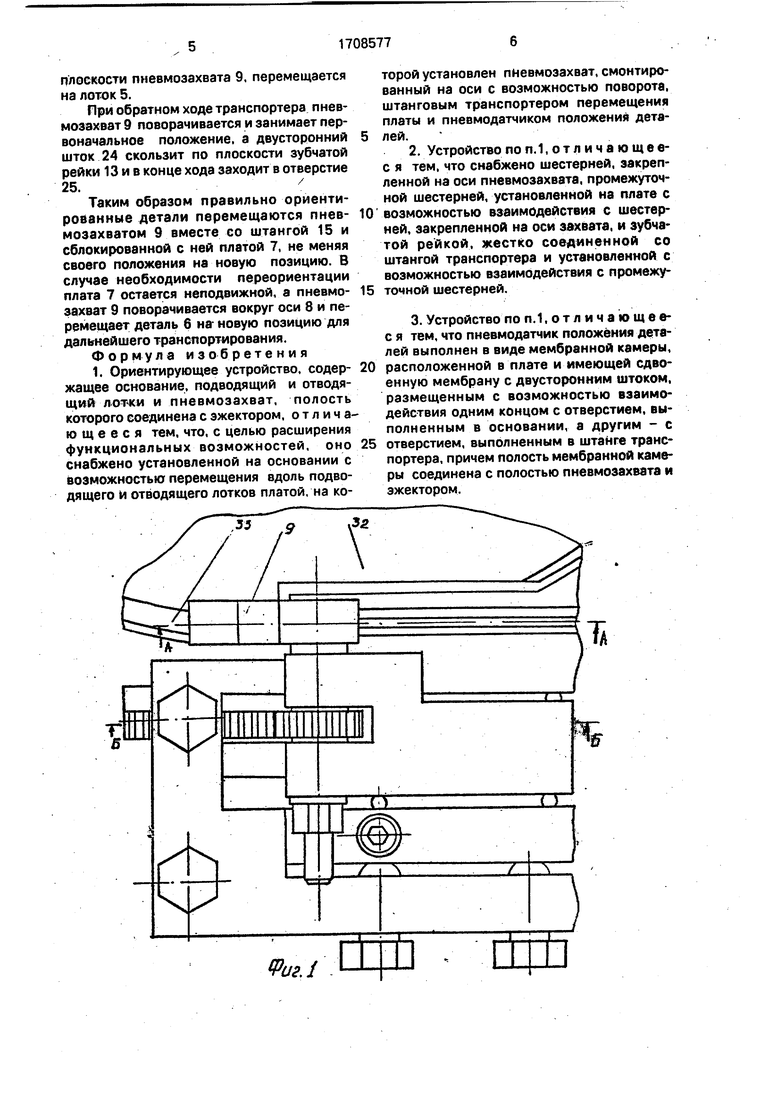
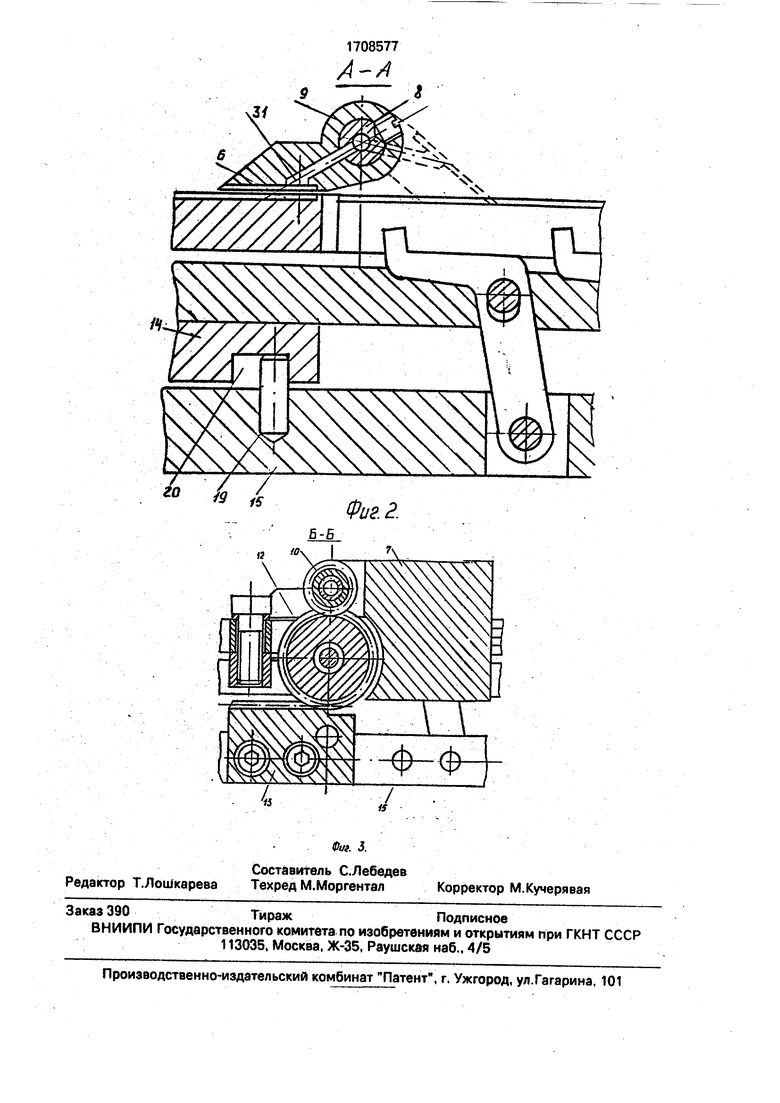
На фиг.1 приведено ориентирующее устройство, вид сверху; на фиг.2 дан разрез А-А на фиг. 1; на фиг.З - разрез Б-Б на фиг. 1; на фиг.4 - ориентирующее устройство в разрезе.
Устройство содержит основание 1, на котором на стойках 2 закреплены планки 3 с установленными на них линейками 4, образующими отводящий лоток 5 для перемещения деталей 6. На основании 1 установлена с возможностью перемещения вдоль отводящего лотка 5 плата 7, на которой на оси 8 установлен с возможностью поворота пневмозахват 9. На оси 8 закреплена шестерня 10 пневмозахвата 9. На плате 7 на оси 11 установлена промежуточная шестерня 12 с возможностью взаимодействия с шестерней 10 пневмозахвата 9. На основании 1 установлен штанговый Транспортер перемещения платы 7, который включает в себя зубчатую рейку, установленную с возможностью взаимодействия с промежуточной шестерней 12, штангу, жестко соединенную с зубчатой рейкой 13, пневмопривод (на чертеже не показан) со штоком 14. На штанге 15 транспортера на осях 16 установлены собачки 17. На штбке 14 пневмопривода транспортера шарнирно закреплена тяга 18, шарнирно соединенная с собачками 17, На штанге 15 транспортера закреплен штифт 19, а на штоке 14 пневмопривода транспортера выполнен паз 20. В плате 7 размещен пневмодатчик положения деталей, выполненный в виде мембранной камеры 21, в которой с помощью крышки 22 закреплены сдвоенные мембраны 23 с двусторонним штоком 24, размещенным с возможностью взаимодействия одним концом с отверстием 25 в штанге 15 транспортера, а другим - с отверстием 26 в стойке 2 основания 1. Сдвоенные мембраны 23 подпружинены пружиной 27, а полость мембранной камеры 21 соединена с помощью штуцера 28 и трубопровода 29 с эжектором 30, который соединен с полостью 31 пневмозахвата 9. На основании 1 установлен вибробункер 32 с подводящим лотком 33.
Устройство работает следующим образом. Детали 6 из вибробункера 32 поступают в подводящий лоток 33. Правильно ориентированные детали 6 перемещаются микровыступами вверх. V неправильно ориентированных деталей верхняя плоскость гладкая. В подводящем лотке 33 деталь 6 проходит под пневмозахват 9. Подается питание в эжектор 30. и деталь 6 присасывается к плоскости пневмозахвата 9. Если деталь правильно ориентирована, то благодаря наличию выступов между плоскостью захвата и телом детали остается зазор, через который подсасывается воздух. Величина разрежения в трубопроводе 29 и между сдвоенными мембранами 23 при этом оказывается недостаточной, чтобы преодолеть усилие пружины 21. Двусторонний шток 24 остается в левом крайнем положении, находясь
5 в отверстии 25 и блокируя плату 7 с зубчатой рейкой 13, соединенной со штангой 15. При . подаче команды на перемещение деталей шток 14 перемещается вправо. При этом сначала движется тяга 18 и происходит по0 ворот собачек 17 вокруг осей 16. Собачки 17 выходят из паза между линейками 4 и вхо-, дят в контакт с деталями 6. Далее, после того как штифт 19 упрется в стенку штока 14, происходит совместное движение штанги
5 15, тяги 18 и всех собачек 17. При этом детали 6 перемещаются по отводящему лотку 5, Плата 7 вместе с пневмозахватом 9 и удерживаемой им деталью 6 также перемещается на один шаг. В конце хода отключается питание эжектора 30 и деталь 6 остается на отводящем лотке 5. После этого шток 14 возвращается назад. Сначала происходит отвод тяги 18 и поворот собачек 17. а затем перемещаются совместно штанга
5 15, тяга 18, собачки 17 и плата 7 с пневмозахватом 9.
Если в подводящем лотке 33 деталь 6 оказалась неправильно ориентированной, т.е. гладкой поверхностью вверх, то в трубопроводе 29 создается значитзльное разрежение, достаточное для преодоления усилия пружины 27. Сдвоенные мембраны 23 перемещаются вправо, а с ними двусторонний шток 24. При этом шток 24 выходит
5 из отверстия 25 и входит в отверстие 26 в стойке 2 основания 1. Благодаря этому плата 7 фиксируется относительно стойки 2. При поступлении команды на перемещение транспортера происходит сначала поворот
0 собачек 17, а затем перемещение штанги 15. Так как штанга 15 и зубчатая рейка 13 не сблокированы с платой 7, то происходит движение зубчатой рейки 13 относительно неподвижной платы 7. При этом вращаются
5 шестерни 10 и 112, а также закрепленный на оси 8 пневмозахват 9, Пневмозахват 9 вместе с деталью 6 поворачивается вокруг оси 8 и в конце хода штанги 15 упирается в отводящий лоток 5. Отключается питание эжектора 30 и деталь, скользя по наклонной
плоскости пневмозахвата 9, перемещается на лоток 5.
При обратном ходе транспортера пневмозэхват 9 поворачивается и занимает первоначальное положение, а двусторонний шток 24 скользит по плоскости зубчатой рейки 13 и в конце хода заходит в отверстие 25./
Таким образом правильно ориентированные детали перемещаются пневмозахватом 9 вместе со штангой 15 и сблокированной с ней платой 7, не меняя своего положения на новую позицию. В случае необходимости переориентации плата 7 остает ся неподвижной, а пневмозахват 9 поворачивается вокруг оси 8 и перемещает деталь 6 на новую позицию для дальнейшего транспортирования.
Формула изобретения
1. Ориентирующее устройство, содержащее основание, подводящий и отводящий л отжи и пневмозахват, полость которого соединена с зжектором, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено установленной на основании с возможностью перемещения вдоль подводящего и отводящего лотков платой, на коVu2,i
торой установлен пневмозахват, смонтированный на оси с возможностью поворота, штанговым транспортером перемещения платы и пневмодатчиком положения деталей.
2.Устройствопоп.1,отличающеес я тем, что снабжено шестерней, закрепленной на оси пневмозахвата, промежуточной шестерней, установленной на плате с
возможностью взаимодействия с шестерней, закрепленной на оси захвата, и зубчатой рейкой, жестко соединенной со штангой транспортера и установленной с возможностью взаимодействия с промежуточной шестерней.
3.Устройство по п.1,отличающеес я тем, что пневмодатчик положения деталей выполнен в виде мембранной камеры,
расположенной в плате и имеющей сдвоенную мембрану с двусторонним штоком, размещенным с возможностью взаимодействия одним концом с отверстием, выполненным в основании, а другим - с
отверстием, выполненным в штаНге транспортера, причем полость мембранной камеры соединена с полостью пневмозахвата и зжектором.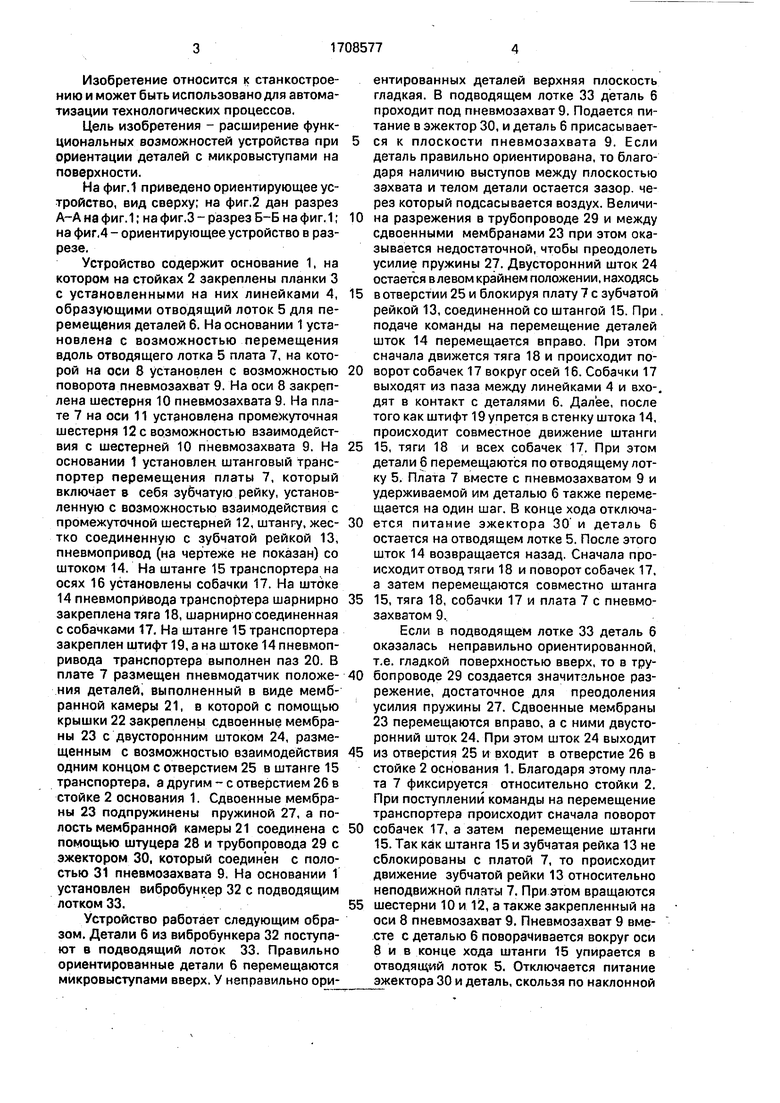
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАННОЙ ПОДАЧИ СТРАТИФИКАТОРОВ | 1993 |
|
RU2053094C1 |
| Автооператор к автомату контроля магнитопроводов | 1984 |
|
SU1259347A1 |
| Транспортер для передачи деталей с позиции на позицию | 1989 |
|
SU1713780A1 |
| Магазин-накопитель | 1984 |
|
SU1225759A1 |
| Линия комплексной отделки щитовых деталей мебели | 1988 |
|
SU1574488A1 |
| Устройство для подачи деталей | 1986 |
|
SU1397247A1 |
| Устройство для сборки роликов | 1981 |
|
SU1054007A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU381497A1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| Загрузочное устройство для поршней | 1984 |
|
SU1164034A1 |
Изобретение относится к станкостроению и может быть использовано для автоматизации технологических процессов. Цель изобретения - расширение функциональных возможностей при ориентации деталей с микровыступами на поверхности. Устройство содержит основание 1. подводящий и отводящий лотки, пневмозахват 9, полость которого соединена с эжектором 30, установленную с возможностью перемещения вдоль лотков плату, на которой уста-новлен пневмозахват 9, смонтированный на оси 8 с возможностью поворота, штанговый транспортер перемещения платы 9, включающий штангу и жестко соединенную с ней зубчатую рейку 13, и пневмодатчик положения деталей, который выполнен в виде мем- бранной камеры 21, расположенной в платен и имеющей сдвоенную мембрану 23 с двусторонним штоком 24, размещенным с возможностью взаимодействия одним концом с отверстием 25 в штанге транспортера, а другим - с отверстием 26 в стойке 2 основания 1. Полость мембранной камеры 21 соединена с полостью пневмозахвата 9 и эжектором 30. Устройство снабжено шестерней 10, закрепленной на оси 8 пневмозахвата 9, и Промежуточной шестерней 12, установленной на плате 7 с возможностью взаимодейст§ия с шестерней 10 пневмозахвата 9 и с зубчатой рейкой 13. 2 з.п. ф-лы, 4 ил.с?^S ЮЩиг.^гз 1S00 СПVI VI
| Устройство для ориентирования деталей | 1977 |
|
SU621628A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
