VI оо
00
о
Изобретение относится к позиционному программному управлению механизмами и может быть использовано при управлении станками, имеющими несколько позиционируемых механизмов.
Известно устройство позиционирования ЧПУ несколькими механизмами, перемещение которых осуществляется поочередно и независимо друг от друга индивидуальными двигателями.
Недостатком этого устройства является наличие двигателей по числу механизмов и выполнение поочередного позиционирования, что удлиняет цикл работы механизмов.
Известно устройство позиционирования п механизмов, содержащее преобразователь сигналов управления, электродвигатель, соединенный посредством вала и п электромагнитных муфт с ша- риковыми гайками перемещения п механизмов, п электротормозов механизмов, п инкрементных датчиков положения, ходовой винт и модуль управления.
Недостатком этого .устройства является увеличенное время позиционирования, обусловленное необходимостью возврата механизма в исходное положение перед повторным позиционированием.
Целью изобретения является уменьшение времени позиционирования.
Поставленная цель достигается тем, что устройство позиционирования п механизмов, включающее преобразователь сигналов управления, электродвигатель, соединенный посредством вала и п электромагнитных муфт с п шариковыми гайками перемещения п механизмов, п электротормозов механизмов, п инкрементных датчиков положения, ходовой винт и модуль управления, содержит блок выбора направления перемещения механизмов, блок выбора величины скорости перемещения, а также п элементов НЕ и ступенчатый регулятор скорости, при этрм модуль управле- ния выполнен в виде п блоков управления, каждый из которых состоит из реверсивного счетчика, блока задания координат позиционирования, блока сравнения координат и m блоков сравнения скоростей перемещения, где m - число ступеней регулирования скорости, выход реверсивного счетчика соединен с первым входом блока сравнения координат, второй вход которого соединен с соответствующим выходом блока задания координат позиционирования, первый выход блока сравнения координат соединен с первыми входами m блоков сравнения скоростей перемещения, вторые входы которых соединены с соответствующими выходами блока задания координат позиционирования, выходы m блоков сравнения скоростей перемещения являются первой группой выходов блока управления, образующей первую группу выходов модуля управления, соединенных с соответствующими входами блока выбора величины скорости перемещения, второй и третий выходы блока сравнения координат являются второй группой выходов блока управления, образующей вторую группу выходов модуля управления, соединенных с соответствующими входами блока выбора направления перемещения механизмов, вход реверсивного счетчика является входом блока управления, соединен с выходом соответствующего инкрементного датчика положения и является 1-м входом модуля управления, где 1 I n; m выходов Цлока выбора величины скорости перемещения подключены к первой группе из m входов выбора величины скорости ступенчатого регулятора скорости, соединенного с преобразователем сигналов управления, первая группа из двух выходов блока выбора направления перемещения
механизмов подсоединена к второй группе из двух входов выбора направления перемещения механизмов регулятора скорости, вторая группа из п выходов блока выбора .направления перемещения механизмовсоединена непосредственно с выводами обмоток п электромагнитных муфт, а через п элементов НЕ - с входами п электротормозов механизмов. Блок выбора направления перемещения механизмов содержит первую, вторую и третью группы из п элементов И каждая, первый и второй элементы ИЛИ, элемент НЕ и элемент И, при этом выход , первого элемента . ИЛИ соединен с вхо- | дом элемента НЕ и первыми входами элементов И первой группы, вторые входы которых соединены с п входами первого элемента ИЛИ, являющимися первой группой из п входов блока выбора направления перемещения, механизмов, выход элемента
НЕ подключен к первому входу элемента И, к второму входу которого подсоединен выход второго элемента ИЛИ, п выходов элементов И первой группы связан с первыми п входами элементов И второй группы, вторые rv входов которых соединены с п выходами элементов И третьей группы, первые входы которых подсоединены к выходу эле мента И, а вторые входы связаны с п входами второго элемента ИЛИ, являющимися второй группой из п входов блока выбора
направления перемещения механизмов, выходы первого элемента ИЛИ и элемента И образуют первую группу из двух выходов блока выбора направления перемещения
механизмов, а выходы элементов И второй группы - вторую группу из п выходов блока выбора направления перемещения механизмов. Блок выбора величины скорости перемещения содержит m элементов ИЛИ (т - 1) элементов НЕ и (т - 1) элементов I/I, при этом выход каждого 1-го из m элементов ИЛИ, где (i i m), кроме первого, соединен с первым входом i-ro элемента И, второй вход которого подключен к выходу 1-го элемента НЕ, вход i го элемента НЕ соединен с выходом(I - 1)-г.оэлемента И, выход первого элемента ИЛИ связан с входом первого элемента НЕ, выход первого элемента ИЛ И и выходы (т - 1) элементов И образуют группу из m выходов блока выбора величины скорости перемещения, a m групп из п входов каждая элементов ИЛИ образуют m групп из п входов каждая блока выбора величины скорости перемещения.
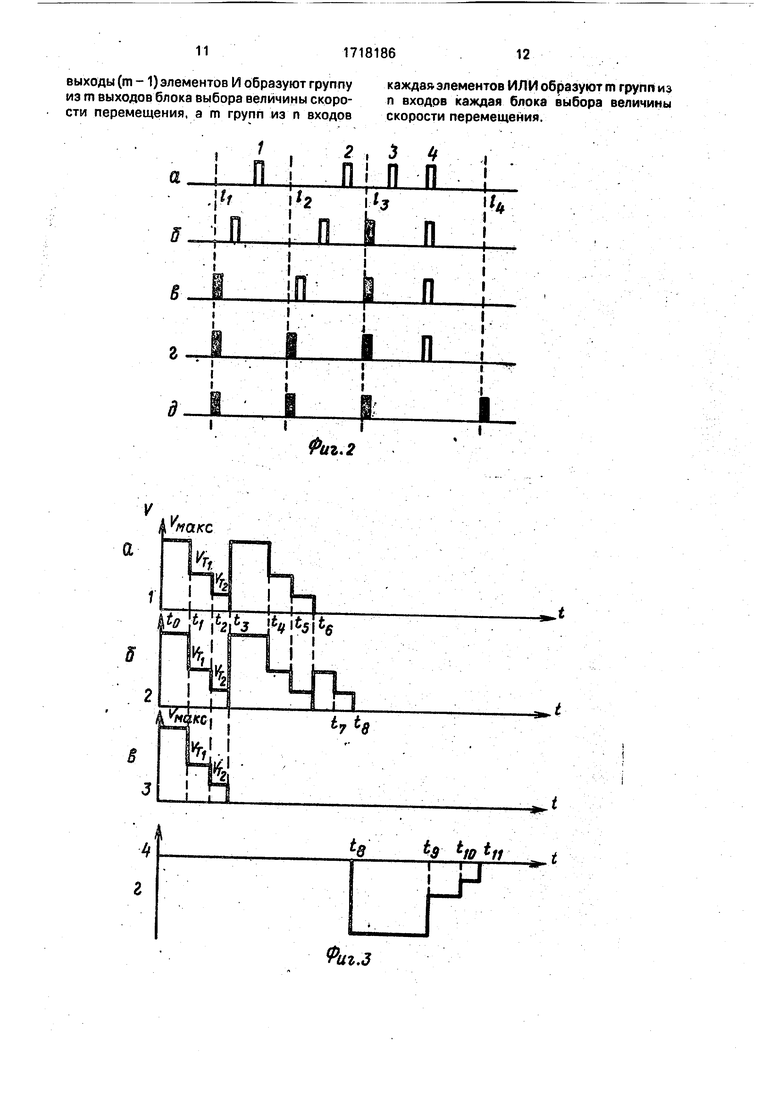
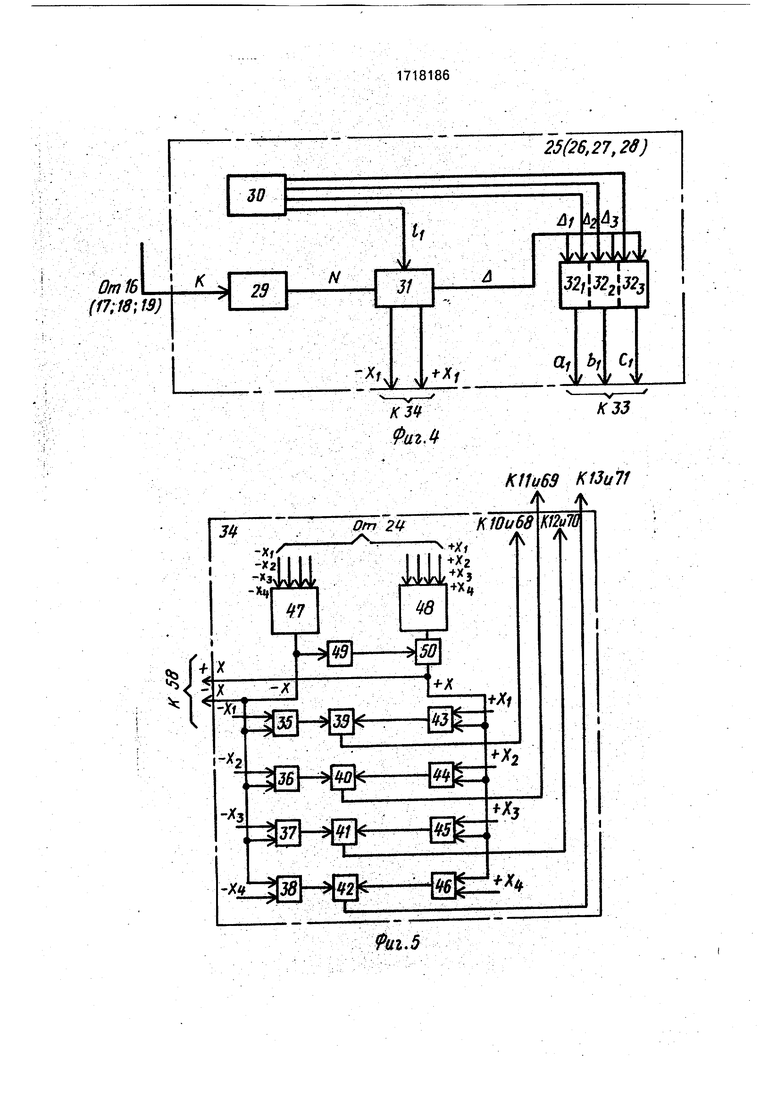
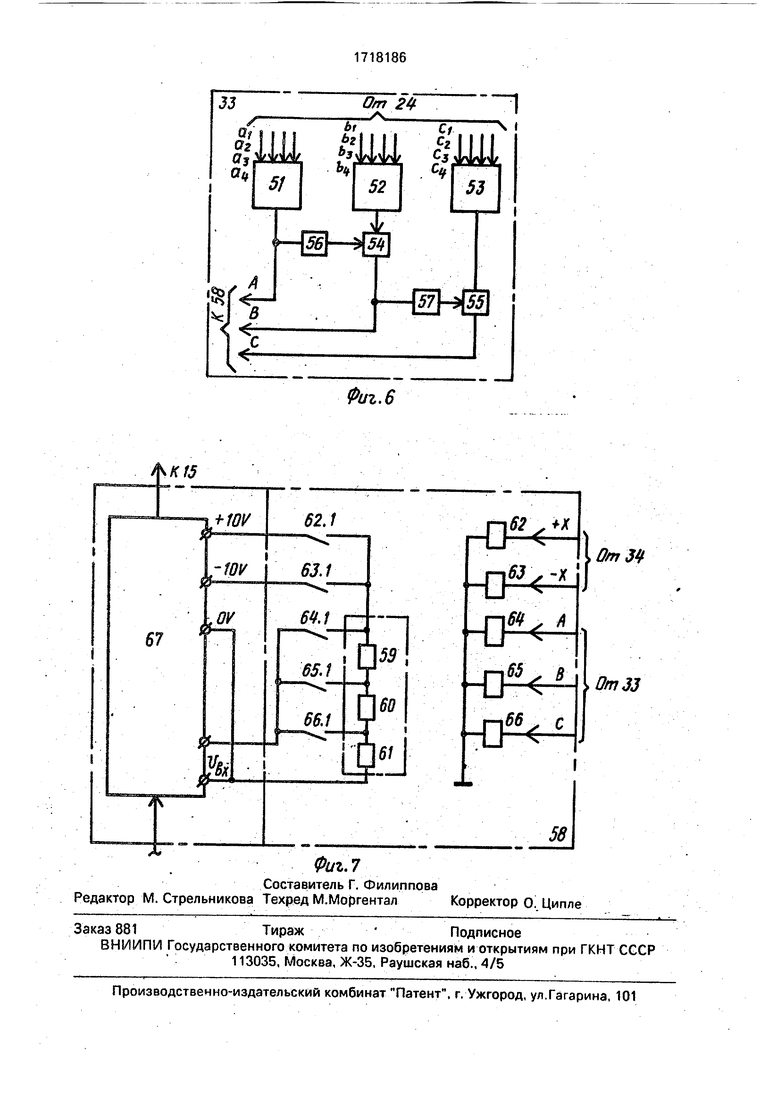
На фиг. 1 изображена схема устройства позиционирования; на фиг. 2 - схематичное расположение механизмов при позиционировании; на фиг. 3 - график изменения скоростей позиционируемых механизмов; на фиг. 4 -схема блока управления; на фиг. 5 - схема блока выбора направления перемещения механизмов; на фиг. б блока выбора величины скорости перемещения механизмов; на фиг. 7 - схема регулятора скорости.
Устройство позиционирования содержит п механизмов, например четыре сило- вые головки 1 - 4 с режущими инструментами, перемещаемые посредством шариковых гаек 5-8, размещенных на ходовом винте 9. Гайки 5-8 посредством муфт 10 - 13 связаны с вращающимся валом 14, соединенным с приводным электродвигателем 15. На шариковых гайках 5-8 закреплены инкрементные датчики 16 - 19 обратной связи позиционируемых головок 1 - 4 и электротормоза 20 - 23.
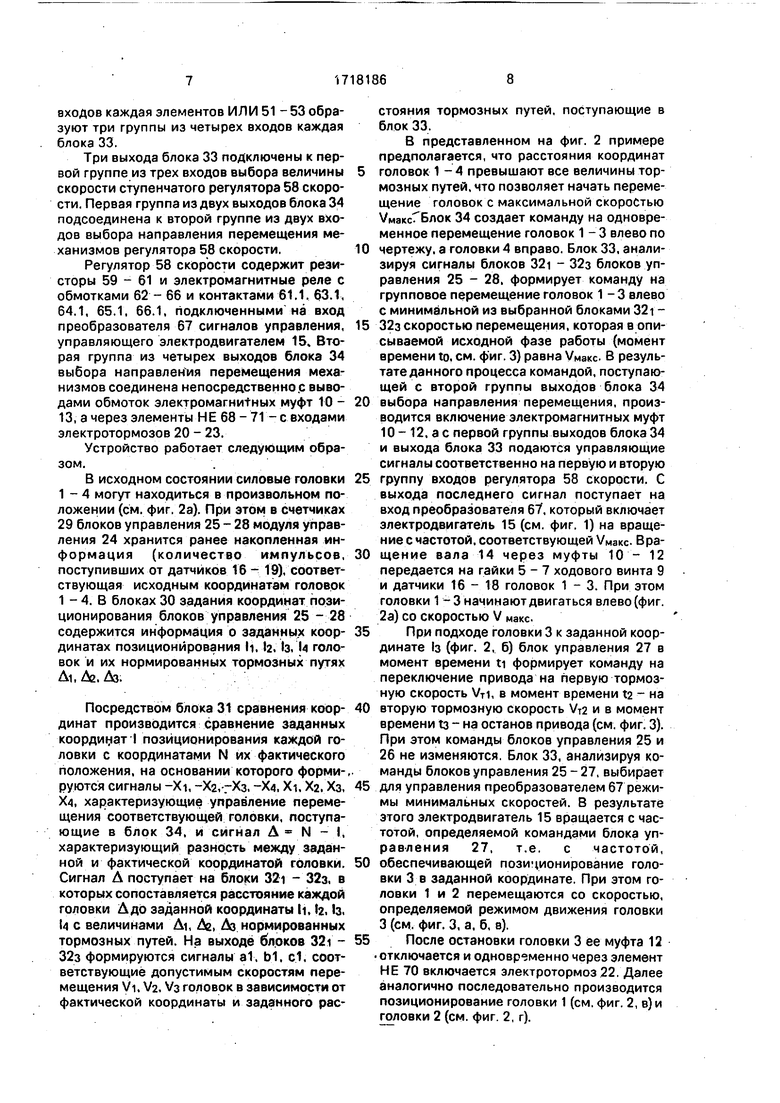
Устройство позиционирования также содержит модуль управления 24, состоящий из блоков управления 25 - 28, каждый из которых включает реверсивный счетчик 29, вход которого является входом блока управления и i-ым входом модуля управления, где I 1 4, при этом вход счетчика соединен с выходом одного из датчиков 16 - .19, блок 30 задания координат позиционирования, хранящий в памяти по координате I позиционирования одной из головок 1 - 4 и заданные расстояния тормозных путей, блок 31 сравнения координат и m блоков 32 сравнения скоростей перемещения, где m - число ступеней регулирования скорости, например m 3. Первый вход блока 31 соединен
с выходом реверсивного счетчика 29, второй входблока31 -ссоответствующим выходом блока 30, а первый выход подключен к первым входам блоков 321 - 32з, вторые входы
5 которых соединены с соответствующими выходами блока30. Выходы бло.ков321 -32з являются первой группой выходов блока управления, образующей первую группу выходов модуля управления 24, соединенных с
0 соответствующими входами блока 33 выбора величины скорости перемещения, второй и третий выходы блока 31 являются второй группой выходов блока управления, образующей вторую группу выходов модуля управ5 ления 24, соединенных с соответствующими входами блока 34 выбора направления перемещения механизмов.
Блок 34 содержит первую, вторую и третью группу из четырех элементов И 35 0 38, 39 - 42, 43 - 46 соответственно каждая, первый 47 и второй 48 элементы ИЛИ, элемент НЕ 49 и элемент И 50. Выход первого элемента ИЛИ 47 соединен с входом элемента НЕ 49 и первыми входами элементов
5 И 35 - 38 первой группы, вторые входы которых соединены с входами первого элемента ИЛИ 47, являющимися первой группой из четырех входов блока 34 выбора направления перемещения механизмов.
0 Выход элемента НЕ 49 подключен к первому входу элемента И 50, к второму входу которого подсоединен выход второго элемента ИЛИ 48. Выходы элементов И 35-38 первой группы связаны с первыми входами элемен5 тов И 39 - 42 второй группы, вторые входы которых соединены с выходами элементов И 43 - 46 третьей группы, первые входы которых подсоединены к выходу элемента И 50, а вторые входы связаны с входами вто0 рого элемента ИЛИ 48, являющимися второй группой из четырех входов блока 34, Выходы первого элемента ИЛ И 47 и элемента И 50 образуют первую группу из двух выходов блока 34. Выходы элементов И 39 5 42 второй группы - вторую группу из четырех выходов блока 34 выбора направления перемещения механизмов.
Блок 33 выбора величины скорости перемещения содержит элементы ИЛИ 51 0 53, элементы И 54 и 55, элементы НЕ 56 и .57. Выходы элементов ИЛИ 52 и 53 соединены с первыми входами соответственно элементов И 54 и 55, вторые входы которых подключены к выходу соответственно эле5 ментов НЕ 56 и 57. Вход элемента НЕ 56 соединен с выходом элемента ИЛИ 51, а вход элемента НЕ 57 - с выходом элемента ИЛИ 54. Выход элемента ИЛИ 51 и выходы элементов И 54 и 55 образуют группу из трех выходов блока 33, а три группы из четырех
входов каждая элементов ИЛИ 51 - 53 образуют три группы из четырех входов каждая блока 33.
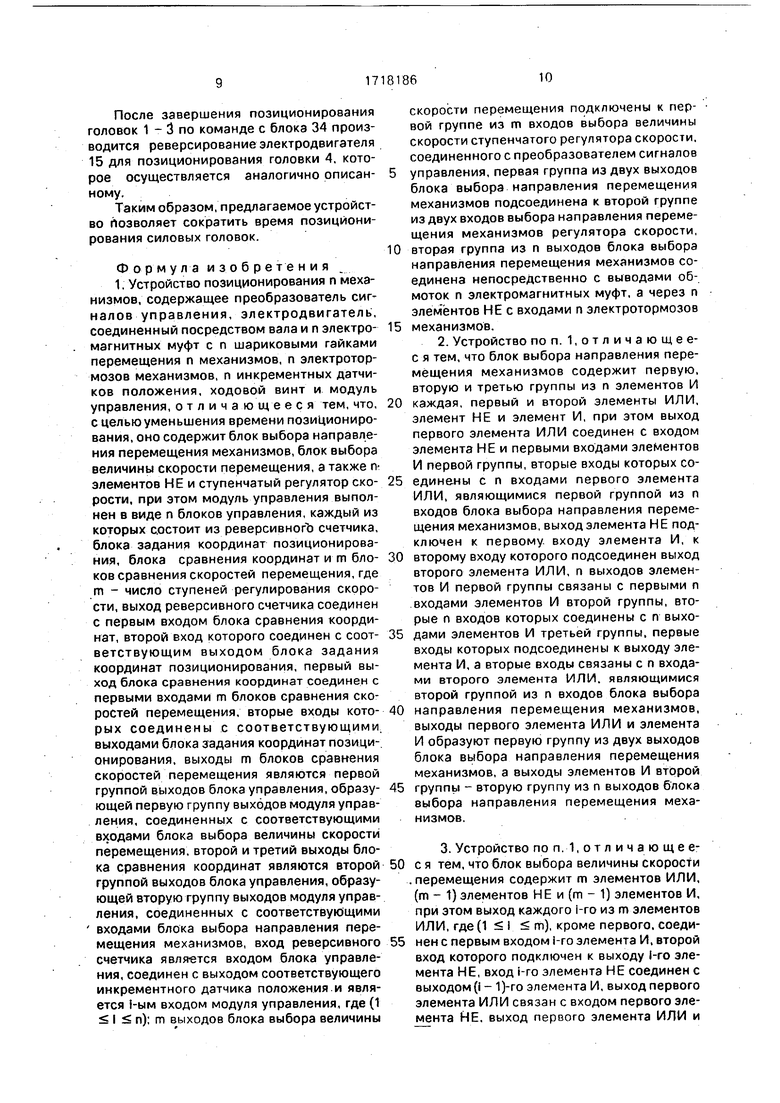
Три выхода блока 33 подключены к первой группе из трех входов выбора величины скорости ступенчатого регулятора 58 скорости. Первая группа из двух выходов блока 34 подсоединена к второй группе из двух входов выбора направления перемещения механизмов регулятора 58 скорости.
Регулятор 58 скорости содержит резисторы 59 - 61 и электромагнитные реле с обмотками 62 - 66 и контактами 61.1, 63.1, 64.1, 65.1, 66.1, подключенными на вход преобразователя 67 сигналов управления, управляющего электродвигателем 15, Вторая группа из четырех выходов блока 34 выбора направления перемещения механизмов соединена непосредственно .с выводами обмоток электромагнитных муфт 10 - 13, а через элементы НЕ 68 - 71 -с входами электротормозов 20 - 23.
Устройство работает следующим образом..
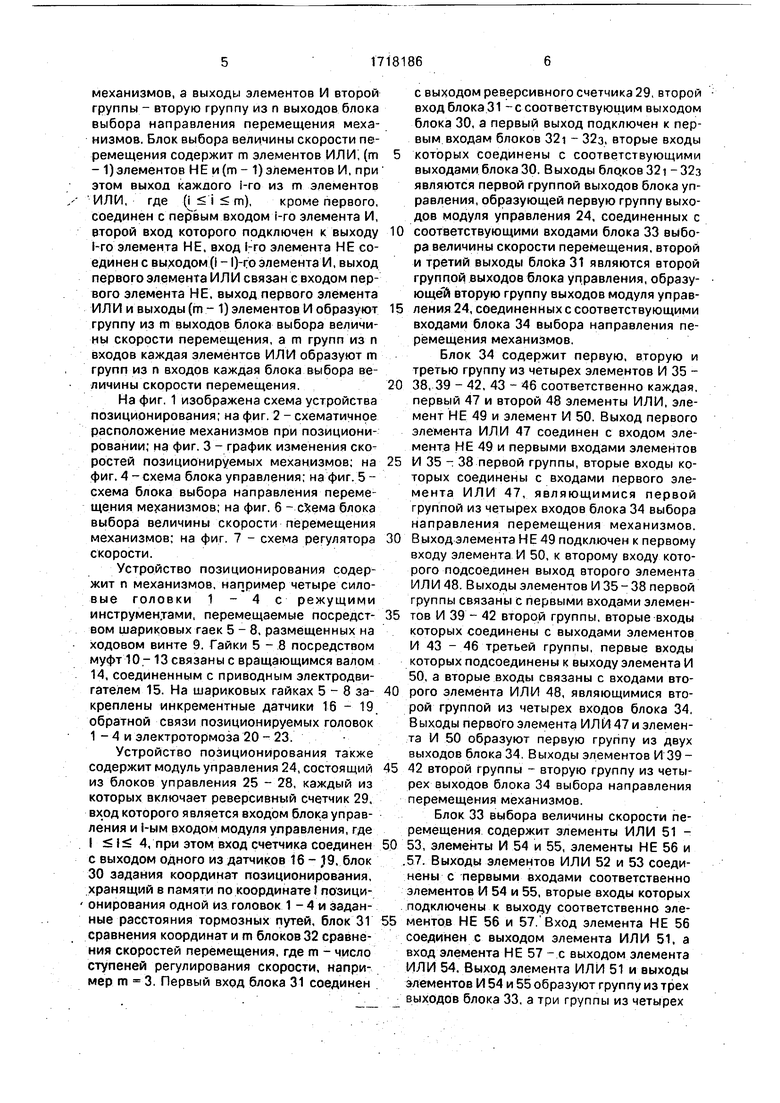
В исходном состоянии силовые головки 1 - 4 могут находиться в произвольном положении (см. фиг. 2а). При этом в счетчиках 29 блоков управления 25 - 28 модуля управления 24 хранится ранее накопленная информация (количество импульсов, поступивших от датчиков 16 - 19), соответствующая исходным координатам головок 1 - 4. В блоках 30 задания координат позиционирования блоков управления 25 - 28 содержится информация о заданных координатах позиционирования И. 12.1з, J4 головок и их нормированных тормозных путях Ai, Дг. Дз.
Посредством блока 31 сравнения координат производится сравнение заданных координат 1 позиционирования каждой головки с координатами N их фактического положения, на основании которого форми-, руются сигналы -Xi, -Х2,-.-Хз, -Ха, XL Xa. Хз, Х4, характеризующие управление перемещения соответствующей головки, поступающие в блок 34, и сигнал Д N - I, характеризующий разность между заданной и фактической координатой головки. Сигнал Д поступает на блоки 32i - 32з, в которых сопоставляется расстояние каждой головки Ддо заданной координаты И, 12.1з. (4 с величинами Ai, Да, Дз нормированных тормозных путей. На выходе блоков 32.1 - 32з формируются сигналы а1, Ы, с.1, соответствующие допустимым скоростям перемещения Vi, Va, Vs головок в зависимости от фактической координаты и заданного расстояния тормозных путей, поступающие в блок 33.
В представленном на фиг. 2 примере предполагается, что расстояния координат
головок 1-4 превышают все величины тормозных путей, что позволяет начать перемещение головок с максимальной скоростью УмаксГБлок 34 создает команду на одновременное перемещение головок 1-3 влево по
0 чертежу, а головки 4 вправо. Блок 33, анализируя сигналы блоков 321 - 32з блоков управления 25 - 28. формирует команду на групповое перемещение головок 1-3 влево с минимальной из выбранной блоками 32t 5 32з скоростью перемещения, которая в описываемой исходной фазе работы (момент времени to, см. фиг. 3) равна N/макс. В результате данного процесса командой, поступающей с второй группы выходов блока 34
0 выбора направления перемещения, производится включение электромагнитных муфт 10 - 12, а с первой группы выходов блока 34 и выхода блока 33 подаются управляющие сигналы соответственно на первую и вторую
5 группу входов регулятора 58 скорости. С выхода последнего сигнал поступает на вход преобразователя 67 который включает электродвигатель 15 (см. фиг. 1) на вращение с частотой, соответствующей 7Макс. Вра0 щение вала 14 через муфты 10 - 12 передается на гайки 5-7 ходового винта 9 и датчики 16 - 18 головок 1 - 3. При этом головки 1 -3 начинают двигаться влево (фиг.
2а) СО СКОРОСТЬЮ V макс.
5 При подходе головки 3 к заданной координате 1з (фиг. 2, б) блок управления 27 в момент времени ti формирует команду на переключение привода на первую тормозную скорость VM, в момент времени t2 -- на
0 вторую тормозную скорость VT2 и в момент времени 1з - на останов привода (см. фиг. 3). При этом команды блоков управления 25 и 26 не изменяются. Блок 33, анализируя команды блоков управления 25 - 27, выбирает
5 для управления преобразователем 67 режимы минимальных скоростей. В результате этого электродвигатель 15 вращается с частотой, определяемой командами блока управления 27, т.е. с частотой,
0 обеспечивающей позиционирование головки 3 в заданной координате. При этом головки 1 и 2 перемещаются со скоростью, определяемой режимом движения головки 3 (см. фиг. 3, а, б, в).
5 После остановки головки 3 ее муфта 12 отключается и одновременно через элемент НЕ 70 включается электротормоз 22. Далее аналогично последовательно производится позиционирование головки 1 (см. фиг. 2, в) и головки 2 (см. фиг. 2, г).
После завершения позиционирования головок 1 - 3 по команде с блока 34 производится реверсирование электродвигателя 15 для позиционирования головки 4, которое осуществляется аналогично описанному.
Таким образом, предлагаемое устройство Позволяет сократить время позиционирования силовых головок.
Формула изобретения 1, Устройство позиционирования п механизмов, содержащее преобразователь сигналов управления, электродвигатель, соединенный посредством вала и п электромагнитных муфт с п шариковыми гайками перемещения п механизмов, п электротормозов механизмов, п инкрементных датчиков положения, ходовой винт и модуль управления, отличающееся тем, что, с целью уменьшения времени позиционирования, оно содержит блок выбора направления перемещения механизмов, блок выбора величины скорости перемещения, а также п- элементов НЕ и ступенчатый регулятор скорости, при этом модуль управления выполнен в виде п блоков управления, каждый из которых состоит из реверсивного счетчика, блока задания координат позиционирования, блока сравнения координат и m блоков сравнения скоростей перемещения, где m - число ступеней регулирования скорости, выход реверсивного счетчика соединен с первым входом блока сравнения координат, второй вход которого соединен с соответствующим выходом блока задания координат позиционирования, первый выход блока сравнения координат соединен с первыми входами m блоков сравнения скоростей перемещения, вторые входы которых соединены с соответствующими выходами блока задания координат позиционирования, выходы m блоков сравнения скоростей перемещения являются первой группой выходов блока управления, образующей первую группу выходов модуля управления, соединенных с соответствующими входами блока выбора величины скорости перемещения, второй и третий выходы блока сравнения координат являются второй группой выходов блока управления, образующей вторую группу выходов модуля управления, соединенных с соответствующими входами блока выбора направления перемещения механизмов, вход реверсивного счетчика является входом блока управления, соединен с выходом соответствующего инкрементного датчика положения.и является i-ым входом модуля управления, где (1 I n); m выходов блока выбора величины
скорости перемещения подключены к первой группе из m входов выбора величины скорости ступенчатого регулятора скорости, соединенного с преобразователем сигналов
5 управления, первая группа из двух выходов блока выбора направления перемещения механизмов подсоединена к второй группе из двух входов выбора направления перемещения механизмов регулятора скорости,
0 вторая группа из п выходов блока выбора направления перемещения механизмов соединена непосредственно с выводами обмоток п электромагнитных муфт, а через п элем ёнтов НЕ с входами п электротормозов
5 механизмов.
2.Устройство по п. 1,отличающее- с я тем, что блок выбора направления перемещения механизмов содержит первую, вторую и третью группы из п элементов И
0 каждая, первый и второй элементы ИЛИ, элемент НЕ и элемент И, при этом выход первого элемента ИЛИ соединен с входом элемента НЕ и первыми входами элементов И первой группы, вторые входы которых со5 единены с п входами первого элемента ИЛИ, являющимися первой группой из п входов блока выбора направления перемещения механизмов, выход элемента НЕ подключен к первому, входу элемента И, к
0 второму входу которого подсоединен выход второго элемента ИЛИ, п выходов элементов И первой группы связаны с первыми п .входами элементов И второй группы, вторые п входов которых соединены с п выхо5 дами элементов И третьей группы, первые входы которых подсоединены к выходу элемента И, а вторые входы связаны с п входами второго элемента ИЛИ. являющимися второй группой из п входов блока выбора
0 направления перемещения механизмов, выходы первого элемента ИЛИ и элемента И образуют первую группу из двух выходов блока выбора направления перемещения механизмов, а выходы элементов И второй
5 группы - вторую группу из п выходов блока выбора направления перемещения механизмов.
3.Устройство по п. 1, о т л и ч а ю щ е е- 0 с я тем, что блок выбора величины скорости
. перемещения содержит m элементов ИЛИ, (т - 1) элементов НЕ и (т - 1) элементов И, при этом выход каждого i-ro из m элементов ИЛИ, где(1 I т), кроме первого, соеди- 5 нен с первым входом i-ro элемента И, второй вход которого подключен к выходу 1-го элемента НЕ, вход 1-го элемента НЕ соединен с выходом (i - 1)-го элемента И, выход первого элемента ИЛИ связан с входом первого элемента НЕ. выход первого элемента ИЛИ и
выходы (m -1) элементов И образуют группу каждая элементов ИЛИ образуют m групп из из m выходов блока выбора величины скоро- п входов каждая блока выбора величины сти перемещения, a m групп из п входов скорости перемещения.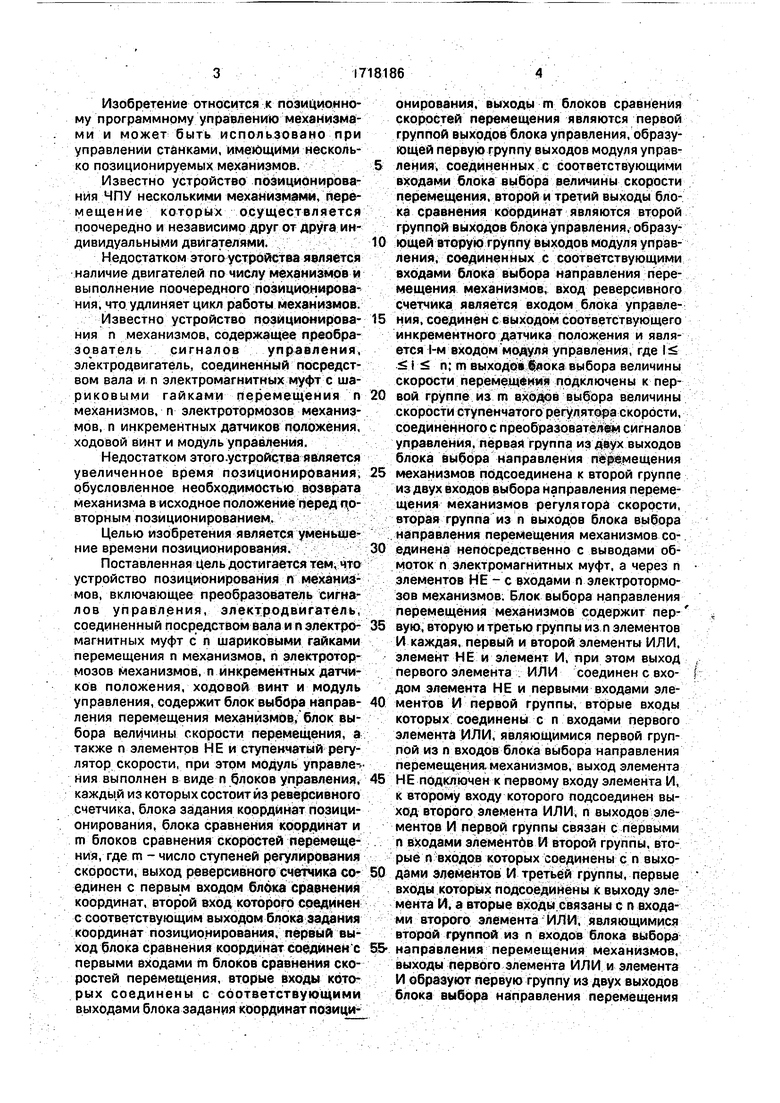
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования головок записи-воспроизведения | 1982 |
|
SU1068995A1 |
| Устройство для расцепления вагонов состава | 1991 |
|
SU1799768A1 |
| Устройство автоматического раскроя заготовки на летучем отрезном станке | 1982 |
|
SU1092015A1 |
| Устройство для позиционирования магнитных головок записи - воспроизведения | 1989 |
|
SU1679545A1 |
| Устройство для управления автоматической транспортно-складской системой | 1988 |
|
SU1665338A1 |
| СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ РАСПОЗНАВАНИЯ НОМЕРОВ ИГРОВОЙ РУЛЕТКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2344478C1 |
| Устройство для контроля качества межслойных соединений печатной платы | 1978 |
|
SU781722A1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕЛЕВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2751144C1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| ОПТИЧЕСКАЯ СИСТЕМА С РЕГУЛИРУЕМЫМИ КАСКАДАМИ ДЛЯ ОФТАЛЬМОЛОГИЧЕСКОГО ЛАЗЕРНОГО СКАЛЬПЕЛЯ | 2010 |
|
RU2569129C2 |
Изобретение относится к позиционному программному управлению механизмами и может быть использовано при числовом программном управлении металлорежущими станками, имеющими несколько позиционируемых механизмов. Цель изобретения - уменьшение времени позиционирования. Устройство позиционирования, например, п силовыми головками содержит электродвигатель 15, преобразователь 67, п блоков управления модуля управления 24, датчика 16-19 обратной связи, блок 34 выбора направления перемещения механизмов и блок 33 выбора величины скорости перемещения. Отличительной особенностью устройства является возможность позиционирования силовых головок из их любого произвольного первоначального положения, что сокращает время позиционирования. 7 ил. со с
Риг.2
а
5
tfftf $
ьз ft Ayitg
I I
Риг.З
t
t
%
т
t$ & iff t
25(26,27,2в)
KM ФтА
К 33
КПибЗ K13u7f
33
bt
с/
Ш Ш Ш
От 24 л
1
с/
#/г.Ј
«
HJ
.5J
« 5
-ш
/7/77jJ
66 , с
-{J
| СПОСОБ ПОЛУЧЕНИЯ ЙОДМЕТИЛПРОИЗВОДНЫХ АРОМАТИЧЕСКИХ УГЛЕВОДОРОДОВ | 0 |
|
SU239305A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4580086 | |||
| кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
