Изобретение относится к машиностроению и может найти применение в промышленных роботах и манипуляторах для захвата крупногабаритных изделий, имеющих отверстия или окна, например блоков цилиндров.
Целью изобретения является расширение технологических возможностей путем обеспечения поворота захватываемого объекта.
На фиг. 1 представлен общий вид захватного устройства; на фиг. 2 - поперечное сечение захватных рычагов в шарнирном сочленении; на фиг. 3- планка с захватными рычагами.
Захватное устройство содержит корпус 1, установленный на подшипниках 2 на внутренней обойме 3. Корпус 1 имеет зубо- образный выступ и стойку, на которой при помощи шарнира 4 установлены два спаренных рычага 5 и 6, имеющие возможность поворота на 90 град. Рычаги 5 и 6 связаны шарнирно установленной планкой 7. На корпусе 1 захватного устройства установлен тормоз 8. Через внутреннее отверстие обоймы 3 проходит шток 9 силового цилиндра 10. На конце штока 9 расположен поворотный упор 11.Захватное устройство имеет рукоятку 12. Крепление захвата в манипуляторе осуществляется при помощи головки 13, жестко связанной с корпусом силового цилиндра 10.
Управление работой захватного устройства производится пусковой аппаратурой 14.
Захватное устройство работает следующим образом (на примере захвата блока цилиндров).
При помощи манипулятора в отверстие под масляный фильтр заводится зубообраз- ный выступ корпуса 1 захватного устройства, а рычаги 5 и б вводят в отверстие под, гильзы блока цилиндров.
При подаче энергоносителя в силовой цилиндр 10 шток 9 через упор 11 воздействует на стенку детали через крестообразную планку 7 и зажимает блок между планкой 7,
рычагами 5, 6 и зубообразным выступом корпуса 1, При конкретном исполнении захватного устройства необходимо стремиться к тому, чтобы горизонтальная ось штока 9 силового цилиндра 10 располагалась возможно ближе к центру тяжести захватываемой детали.
Планка 7, зажатая между упором 11 и блоком, исключает раскрытие рычагов 5 и 6 захватного устройства при повороте блока
на 180 град,
Поднятую деталь вручную (за саму деталь или рычаги захвата) м.ожно повернуть относительно оси вращения на 360 град, т.е. в любое положение, требуемое в соответствии с технологическим процессом. Величина усилия поворота детали в требуемое положение регулируется тормозом 8. Тормоз 8 препятствует также самопроизвольному повороту детали от установленного
положения, когда центр тяжести детали не
лежит на геометрической оси поворота.
Формула изобретения
Захватное устройство, смонтированное
на руке манипулятора, содержащее корпус, захватные рычаги, шарнирно установленные на корпусе,силовой цилиндр,о т л. и ч а ю- щ е е с я тем, что, с целью расширения технологических возможностей, корпус силового цилиндра, жестко смонтированный на руке манипулятора, установлен в корпусе захватного устройства в подшипниках, шток силового цилиндра снабжен упором, имеющим
возможность вращения относительно его продольной оси, а захватные рычаги связаны между собой планкой, шарнирно установленной в рычагах, при этом планка имеет возможность взаимодействия с упором.
У- У.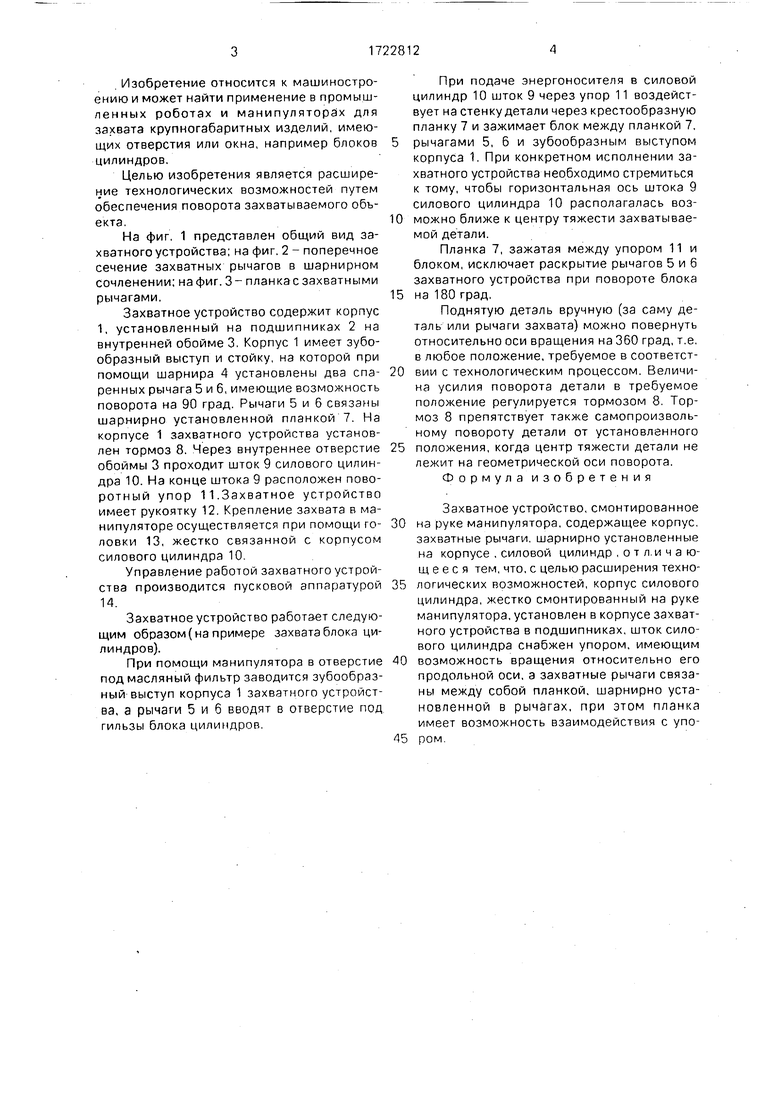
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения и подачи животного на обработку | 1988 |
|
SU1648303A1 |
| Захват манипулятора | 1980 |
|
SU984861A2 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Устройство для захвата двух параллельно расположенных труб | 1975 |
|
SU599872A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Захват манипулятора | 1979 |
|
SU806407A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |

Изобретение относится к машинострое- нию и может найти применение в промышленных роботах и манипуляторах для захвата крупногабаритных изделий. имеющих отверстия или окна, например блоков цилиндров. Целью изобретения является расширение технологических возможностей путем обеспечения поворота захватываемого объекта. Захватное устройство содержит корпус 1. установленный на И И подшипниках 2 на внутренней обойме 3. Корпус имеет зубообразный выступ и стойку, на которой при помощи шарнира 4 установлены два спаренных рычага, имеющих возможность поворота на 90° . Рычаги связаны шарнирно установленной планкой 7. На корпусе захватного устройства установлен тормоз 8. Через внутреннее отверстие обоймы 3 проходит шток 9 силового цилиндра 10. На конце штока 9 расположен поворотный упор 11. Захватное устройство имеет рукоятку 12. Крепление захвата в манипуляторе осуществляется при помощи головки 13, жестко связанной с внутренней обоймой 3. При помощи манипулятора в отверстие под масляный фильтр заводится зубообразный выступ корпуса захватного устройства, а рычаги вводят в отверстие под гильзы блока цилиндров. При подаче энергоносителя в силовой цилиндр 10 шток 9 через упор 11 воздействует на стенку детали через крестообразную планку 7 и зажимает блок между планкой, рычагами и зубообраз- ным выступом корпуса. 3 ил. СП с
1
i-i
2Z
6
| Захватное устройство | 1984 |
|
SU1222544A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
