Изобретение относится к машиностроению, а именно к робототехнике, в частности к роботам модульного типа с ЧПУ, применяемым для механизации и автоматизации вспомогательных технологических операций.
Целью изобретения является расширение технологических возможностей путем увеличения рабочей зоны робота.
На фиг.1 изображен робот, общий вид; на фиг.2 - механизм ограничения угла поворота выходного вала третьего модуля руки; на фиг.З - то же, второго модуля; на фиг,4 - то же, колонны.
Робот содержит основание 1. на котором смонтирована поворотная колонна 2, несущая трехзвенную руку 3, состоящую из последовательно соединенных модуля 4 первого звена, модуля 5 второго звена и модуля 6 ротации (третье звено руки). При этом длина модуля 4 первого звена больше суммы длин двух последующих модулей 5 и 6, т.е.
k 15 + 1б.
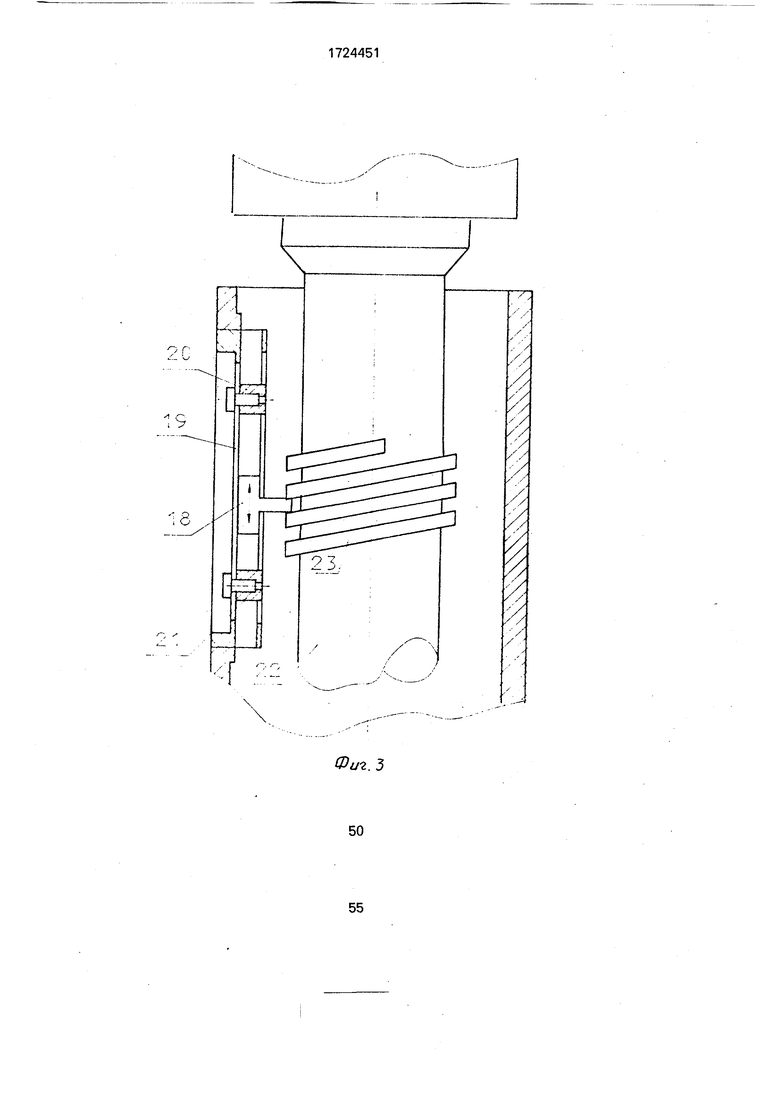
На модуле каждого предыдущего звена смонтирован привод углового перемещения модуля каждого последующего звена руки. Так, на основании 1 смонтирован привод поворота руки 3, на модуле 4 первого звена которой смонтирован привод поворота второго звена 5, а на нем - привод поворота модуля 6 ротации. Каждое из перечисленных звеньев содержит также и механизмы 7-9 ограничения углового перемещения. Механизм ограничения угловых перемещений руки 3 вместе с колонной 2 выполнен конструктивно в виде упора 10, установленного на подвижной колонне 2, взаимодействующего с промежуточным упором 11, размещенным в направляющих 12, выполненных в основании 1 и расположенных в плоскости, перпендикулярной оси вращения колонны 2. В крайних зонах направляющих 12 закреплены регулируемые упоры 13 и 14, взаимодействующие с упором 11. Там же установлены и конечные выключатели 15 и 16, отключающие электропривод при подходе руки 3 с колонной 2 к заданной позиции посредством воздействия упора 11 на соответствующий конечный выключатель 15 или 16.
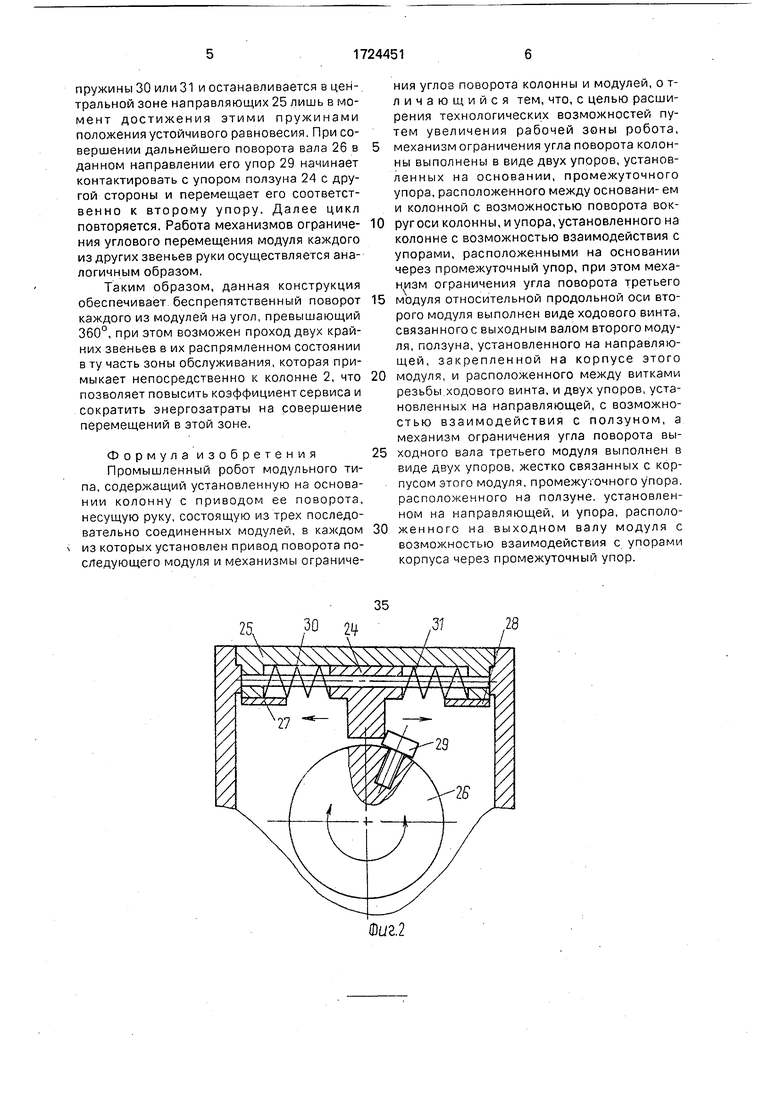
Между упором 11 и основанием 1 смонтирован упругий возвратный элемент - пружина 17, предназначенная для отвода упора 11 от выключателей 15 и 16. Механизм ограничения углового перемещения модуля 6 третьего звена руки выполнен в виде ползуна 18, смонтированного в направляющих 19, выполненных на модуле 5 второго звена и расположенных параллельно оси вращения звена (модуля) 6. На этих направляющих 19 закреплены регулируемые упоры 20 и 21, с которыми взаимодействует ползун 18. С валом 22 привода модуля 6 связан ходовой
винт 23, между витками которого расположен ползун 18. Последний из механизмов ограничения угловых перемещений смонтирован на третьего звене - модуле 6 ротации и представляет собой промежуточный упор,
0 расположенный на ползуне 24, установленном в направляющих 25, расположенных в плоскости, перпендикулярной оси вращения вала 26 (в данном случае это вал захватного устройства).
5 На направляющих 25 закреплены регулируемые упоры 27 и 28, взаимодействующие с упором, с которым взаимодействует также упор 29, закрепленный на валу 26. С каждой стороны упора, между ним и корпу0 сом этого звена закреплены возвратные пружины 30 и 31, устанавливающие упор в его центральное положение относительно направляющих 25, что соответствует положению устойчивого равновесия системы пру5 жинЗОи31.
Устройство работает следующим образом.
При подаче сигнала по программе от устройства ЧПУ происходит при необходи0 мости относительное угловое перемещение всех звеньев робота. При достижении этими звеньями предельных (в угловом отношении) положений срабатывают конечные выключатели, но при их отсутствии или при
5 работе без программных ограничений (в ручном режиме) вращение может продолжаться (при отсутствии механизмов ограничения) вплоть до поломки какой-либо из систем робота. Срабатывание всех механиз0 мов ограничения перемещения происходит одинаково, поэтому этот процесс целесообразно рассмотреть на примере работы механизма ограничения угла поворота выходного вала 26. Закрепленный на нем
5 упор 29 контактирует с упором ползуна 24 и перемещает его по направляющим 25 до его контакта с одним из регулируемых упоров 27 или 28. Поскольку взаимодействие соответствующего подвижного элемента звена
0 (вала 26) с регулируемым упором осуществляется через дополнительное передаточное устройство (через его элемент - ползун 24), то к угловому перемещению вала 26 добавляется еще перемещение и ползуна 24, так
5 что общий ход последующего звена относительно предыдущего значительно увеличивается.
При обратном вращении последующего звена 26 (от регулируемого упора 27 или 28) ползун 24 следует за ним под действием
ружины 30 или 31 и останавливается в ценральной зоне направляющих 25 лишь в мо- мент достижения этими пружинами положения устойчивого равновесия. При совершении дальнейшего поворота вала 26 в данном направлении его упор 29 начинает контактировать с упором ползуна 24 с другой стороны и перемещает его соответственно к второму упору. Далее цикл повторяется. Работа механизмов ограничения углового перемещения модуля каждого из других звеньев руки осуществляется аналогичным образом.
Таким образом, данная конструкция обеспечивает беспрепятственный поворот каждого из модулей на угол, превышающий 360°, при этом возможен проход двух крайних звеньев в их распрямленном состоянии в ту часть зоны обслуживания, которая примыкает непосредственно к колонне 2, что позволяет повысить коэффициент сервиса и сократить энергозатраты на совершение перемещений в этой зоне.
Формула изобретения Промышленный робот модульного типа, содержащий установленную на основании колонну с приводом ее поворота, несущую руку, состоящую из трех последовательно соединенных модулей, в каждом из которых установлен привод поворота последующего модуля и механизмы ограничения углов поворота колонны и модулей, о т- личающийся тем, что, с целью расширения технологических возможностей путем увеличения рабочей зоны робота, механизм ограничения угла поворота колонны выполнены в виде двух упоров, установленных на основании, промежуточного упора, расположенного между основани- ем и колонной с возможностью поворота вок- 0 руг оси колонны, и упора, установленного на колонне с возможностью взаимодействия с упорами, расположенными на основании через промежуточный упор, при этом механизм ограничения угла поворота третьего 5 модуля относительной продольной оси второго модуля выполнен виде ходового винта, связанного с выходным валом второго модуля, ползуна, установленного на направляющей, закрепленной на корпусе этого 0 модуля, и расположенного между витками резьбы ходового винта, и двух упоров, установленных на направляющей, с возможностью взаимодействия с ползуном, а механизм ограничения угла поворота вы- 5 ходного вала третьего модуля выполнен в виде двух упоров, жестко связанных с корпусом этого модуля, промежуточного упора, расположенного на ползуне, установленном на направляющей, и упора, располо- 0 женного на выходном валу модуля с возможностью взаимодействия с упорами корпуса через промежуточный упор.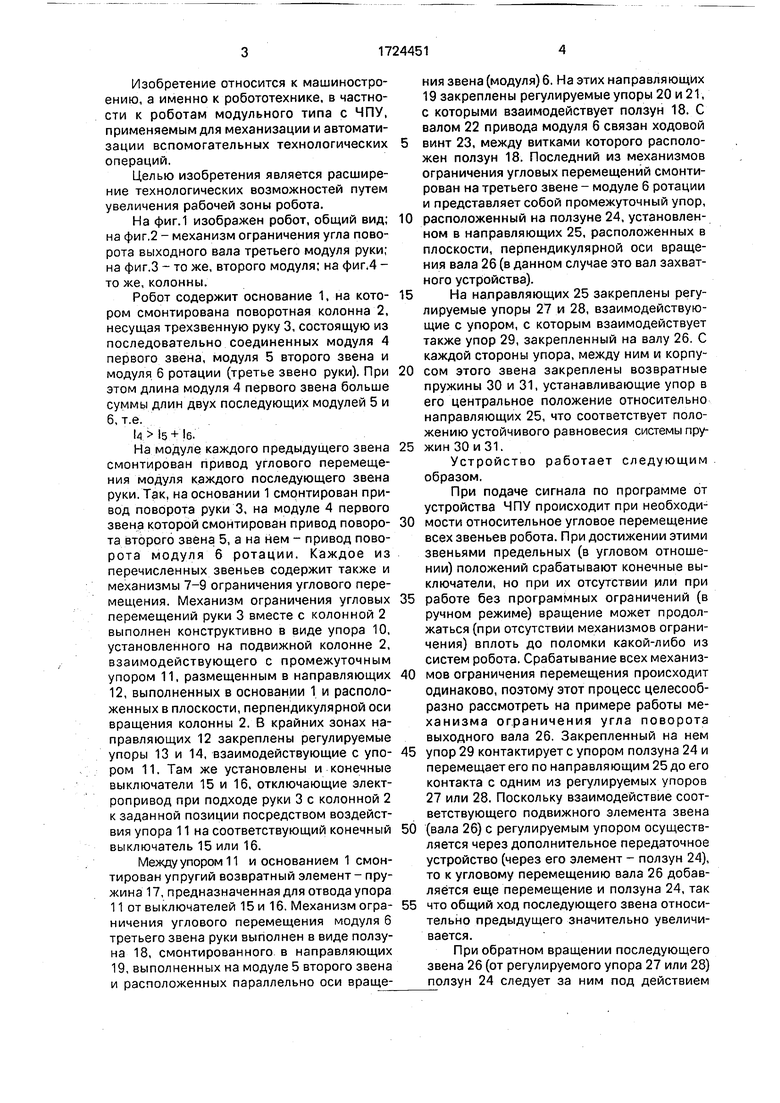
| название | год | авторы | номер документа |
|---|---|---|---|
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Промышленный робот | 1977 |
|
SU808262A1 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
| Механизм поворота руки промышленного робота | 1982 |
|
SU1060464A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Промышленный робот | 1982 |
|
SU1108005A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
Изобретение относится к машиностроению, а именно к робототехнике, в частности к роботам модульного типа с ЧПУ, применяемым для механизации и автоматизации вспомогательных технологических операций. Цель изобретения - расширение технологических возможностей путем увеличения рабочей зоны робота. Наличие на поворотных звеньях робота механизмов 7-9 ограничения их углового перемещения, в которых использован промежуточный элемент между упором перемещаемого звена и упором, ограничивающим перемещение, обеспечивает беспрепятственный поворот звеньев на угол, превышающий 360°. 4 ил.
,31
28
| Патент ФРГ N52852821, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
