сл С
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1991 |
|
SU1816686A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Схват | 1987 |
|
SU1407796A1 |
| Захватное устройство | 1986 |
|
SU1393627A1 |
| Захватное устройство | 1984 |
|
SU1222542A1 |
| Захват манипулятора | 1989 |
|
SU1821357A1 |
| Схват | 1983 |
|
SU1161375A1 |
| Схват манипулятора | 1987 |
|
SU1537522A1 |
| Схват | 1990 |
|
SU1811477A3 |
| УНИВЕРСАЛЬНЫЙ РОБОТ ДЛЯ ИНТЕРВЕНЦИОННОЙ АНГИОГРАФИЧЕСКОЙ ХИРУРГИИ И ИНТЕРВЕНЦИОННОЙ ТЕРАПЕВТИЧЕСКОЙ ХИРУРГИИ | 2021 |
|
RU2760468C1 |
Изобретение относится к машиностроению, а именно к захватам для промышленных роботов и манипуляторов. Цель изобретения - увеличение усилия зажима захвата. Захват содержит основание, подвижные пальцы, имеющие возможность скольжения по направляющей и связанные с приводом винтовой передачей. В одном из пальцев выполнена полость, заполненная жидкостью. Полость имеет отверстия, закрытые поршнями, больший из которых направлен в сторону зажимаемой детали, а меньший соединен с ползуном, который может скользить по направляющей и соединен с гайкой винтовой передачи. Участки винта, контактирующие с гайками ползуна и пальца, соединены упругим элементом. 1 ил.
Изобретение относится к машиностроению, а именно к захватам для промышленных роботов и манипуляторов для захвата и надежного закрепления деталей.
Цель изобретения - увеличение усилия зажима захвата.
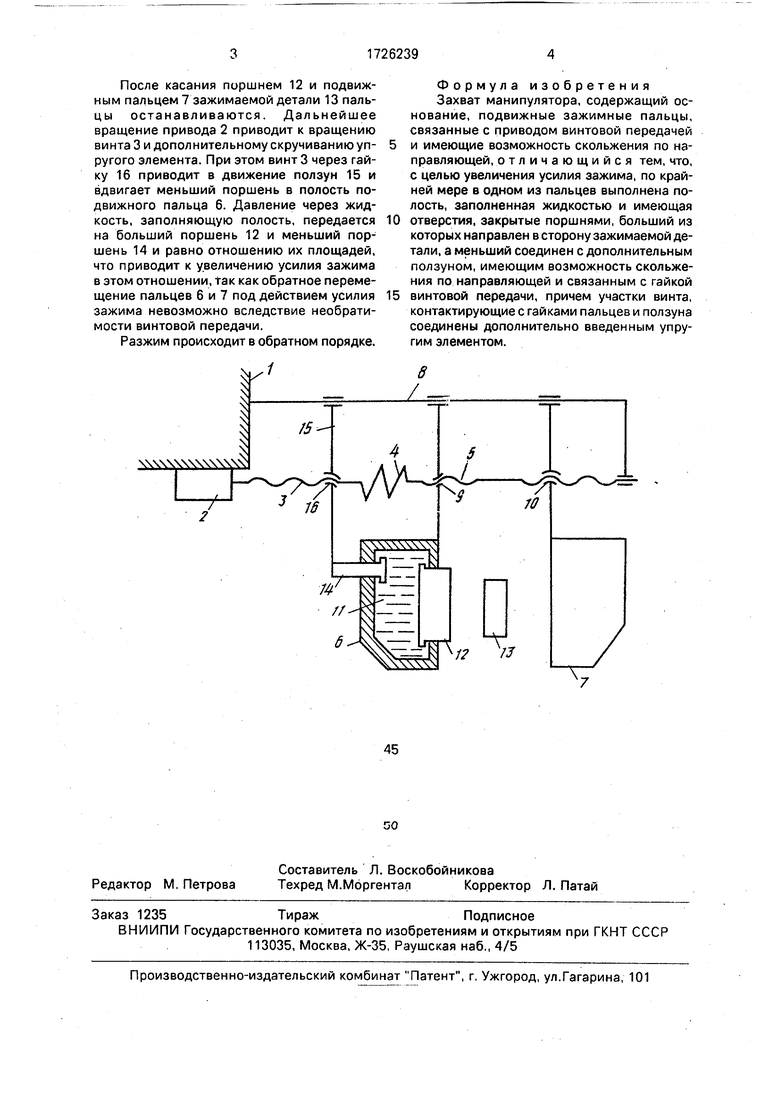
На чертеже изображена схема захвата.
На основании 1 установлен привод 2, связанный с винтом 3 винтовой передачи, который через упругий элемент 4 связан с винтом 5. Подвижные пальцы 6 и 7 могут скользить по направляющей 8, Гайками 9 и 10 соответственно они связаны с винтом 5 винтовой передачи. В пальце 6 выполнена полость 11, заполненная жидкостью. Полость имеет отверстия, в которых расположены поршни. Больший поршень 12 обращен в сторону зажимаемой детали 13. Меньший поршень 14 связан с ползуном 15, имеющим возможность скольжения по направляющей 8 и связанным гайкой 16 с винтом 3 винтовой передачи. Возможность выпадения поршней 12 и 14 из полости 11 предотвращается их выступами.
Захват работает следующим образом.
При вращении приводом 2 винта 3 винтовой передачи происходит скручивание упругого элемента 4, что через гайку 16 приводит в движение ползун 15, связанный с меньшим поршнем 14. При этом последний вдвигается, а поршень 12 выдвигается из полости 11 подвижного пальца 6. При превышении усилия скрученного упругого элемента силы трения в подвижных пальцах приходит в движение винт 5, который через гайки 9 и 10 приводит в движение подвижные пальцы 6 и 7. Подвижные пальцы движутся к зажимаемой детали 13. Жесткость упругого элемента 4 выбирается так, чтобы не происходило касание выступами поршней 14 и 12 подвижного пальца 6 и они имели бы возможность дальнейшего движения.
х| ;Ю О
ю со ю
После касания поршнем 12 и подвижным пальцем 7 зажимаемой детали 13 паль- цы останавливаются. Дальнейшее вращение привода 2 приводит к вращению винта 3 и дополнительному скручиванию упругого элемента. При этом винт 3 через гайку 16 приводит в движение ползун 15 и вдвигает меньший поршень в полость подвижного пальца 6. Давление через жидкость, заполняющую полость, передается на больший поршень 12 и меньший поршень 14 и равно отношению их площадей, что приводит к увеличению усилия зажима в этом отношении, так как обратное перемещение пальцев 6 и 7 под действием усилия зажима невозможно вследствие необратимости винтовой передачи.
Разжим происходит в обратном порядке.
Формула изобретения Захват манипулятора, содержащий основание, подвижные зажимные пальцы, связанные с приводом винтовой передачей
и имеющие возможность скольжения по направляющей, отличающийся тем, что, с целью увеличения усилия зажима, по крайней мере в одном из пальцев выполнена полость, заполненная жидкостью и имеющая
отверстия, закрытые поршнями, больший из которых направлен в сторону зажимаемой детали, а меньший соединен с дополнительным ползуном, имеющим возможность скольжения по направляющей и связанным с гайкой
винтовой передачи, причем участки винта, контактирующие с гайками пальцев и ползуна соединены дополнительно введенным упругим элементом.
Л.У
Р
| Делиев С., Наков В | |||
| Хващащи механизмы, София; Техника, 1982, с | |||
| Катодное реле | 1918 |
|
SU159A1 |
