Изобретение относится к промышленному транспорту и предназначено для использования в гравитационных конвейерах для транспортирования хрупких изделий.
Известно тормозное устройство, обеспечивающее плавное торможение грузов с зазорами между ними и регулирование усилий торможения за счет дросселя, обеспечиваемое двуплечим рычагом, верхний конец которого контактирует с грузом, а нижний передает тормозное усилие на шток силового цилиндра, имеющего регулируемое пропускное сечение и, следовательно, регулируемое усилие торможения.
Недостатком известного устройства является невозможность использования его при торможении хрупких грузов, так как наличие непосредственного контакта тормозящего органа с торцом изделий из хрупких материалов, например углеграфитовых электродных заготовок, недопустимо вследствие больших удельных давлений в месте контакта, приводящих к разрушению торца груза.
Целью изобретения является расширение эксплуатационных возможностей устройства путем обеспечения его использования при торможении хрупких грузов.
vj
§
vj О
Для достижения указанной цели тормозное устройство гравитационного конвейера содержит расположенный на оси на неподвижной раме ведущий тормозной гру- зонесущий ролик, основной пневмоци- линдр, полости которого сообщены через дроссель, а корпус установлен на неподвижной раме, и шарнирно связанный со штоком основного пневмоцилиндра управляющий рычаг, который выполнен одноплечим и жестко закреплен на оси ведущего тормозного грузонесущего ролика. Кроме того, устройство снабжено дополнительным пневмоци- линдром, шток которого шарнирно связан с управляющим рычагом, а его полости также сообщены при помощи дросселя. Корпуса обоих пневмоцилиндров установлены на неподвижной раме посредством опор вращения с возможностью поворота в вертикальной плоскости, при этом расположенные в вертикальной плоскости и соединяющие опоры вращения пневмоцилиндров с осью вращения ведущего тормоз- ного грузонесущего ролика прямые образуют между собой прямой угол. Устройство имеет также ведомые тормозные грузо- несущие ролики, расположенные в ряд с ведущим тормозным грузонесущим роликом и связанные с ним посредством цепной передачи.
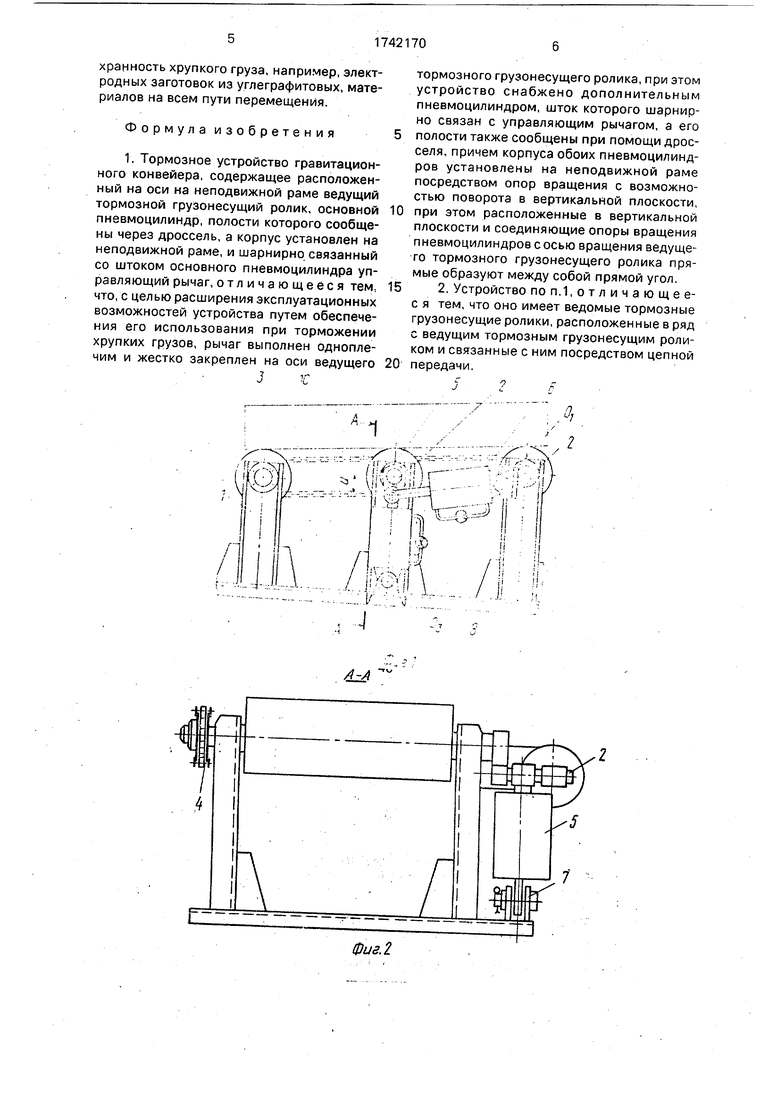
На фиг.1 представлен общий вид гравитационного конвейера и вид сбоку на тормозное устройство; на фиг.2 - сечение А-А на фиг.1.
Гравитационный конвейер содержит раму 1, на которой наклонно установлены на осях 2 вращающиеся ролики 3. Ролики 3 имеют жесткую связь со звездочками 4 и одноплечим рычагом 5, закрепленным на оси 2 тормозного грузонесущего ролика. На рычаге шарнирно закреплены штоки двух пневмоцилиндров 6, корпуса которых шарнирно закреплены на раме 1 с помощью опор вращения 7 (точки 02 и Оз), что обеспечивает им возможность поворота в вертикальнойплоскости,Полости пневмоцилиндров сообщены через дроссель 8. При этом взаимное расположение пневмоцилиндров выполнено таким образом, что прямые соединяющие оси опор вращения пневмоцилиндров (точки Oi и Оз) с осью вращения тормозного ролика (точка Оа) в вертикальной плоскости перпендикулярны друг другу (т.е. на чертеже прямая OaOi прямой ОаОз). Ведомые грузонесущие ролики связаны с тормозным роликом цепной передачей 9. При перемещении по роликам конвейера груз 10, двигаясь с постоянным ускорением, приобретает скорость и попадает на тормозное устройство.
За счет сил сцепления груза с роликами 3 последние начинают вращаться по ходу груза, но их вращению противодействует тормозное сопротивление, возникающее за
счет принудительного перемещения штоков цилиндров 6, связанных с помощью рычага 5 с осью тормозного ролика 3. Такое крепление штоков, расположение пневмоцилиндров в устройстве обеспечивает
0 одновременную работу 2 пневмоцилиндров и создает постоянный тормозной момент на ролике, т.к. сумма плеч а, передающих усилие торможения с обоих штоков на ось ролика, всегда одинакова (на фиг.1 для вер5 тикально расположенного цилиндра , для горизонтального - а равно максимальному значению).
Плавное автоматическое регулирование тормозного усилия обеспечивают свой0 ства перепускаемого через регулируемый дроссель 8 воздуха, обладающего при повышении давления в системе перепуска пружинным эффектом. При большой скорости перемещения груза 10 тормозной ролик 3
5 конвейера за счет сил сцепления с грузом получает большую скорость вращения. Эту же скорость вращения получает одноплечий рычаг 5, соединенный со штоками пневмоцилиндров 4 и последние вынуждены пере0 мещаться в цилиндрах также с большей скоростью.
В этих условиях перепуск воздуха из одной полости цилиндра в другую через дроссель осуществляется при избыточном
5 давлении, создающим максимальное сопротивление перемещению штока и значит вращение тормозного ролика. Груз тормозится. По мере снижения скорости перемещения груза скорость вращения ролика, однопле0 чего рычага и, следовательно, штоков цилиндров уменьшаются, уменьшается и избыточное давление в перепускной системе а, значит и тормозное усилие. При остановке груза тормозное усилие равно нулю,
5 так как перепуск воздуха прекращается и избыточное давление в системе перепуска отсутствует.
С целью создания условий надежного торможения груза тормозной момент, пере0 даваемый цилиндрами 6 на одну роликоопо- ру за счет связи звездочки 4 - цепная передача 9 передается и на смежные роли- коопоры. Таким образом, движущийся груз всегда имеет контакт не менее чем с двумя
5 тормозными роликоопорами, что предопределяет надежное гашение его скорости.
Использование устройства позволяет решить вопрос транспортирования хрупких грузов гравитационным способом, не требующим энергоносителя, и обеспечить сохранность хрупкого груза, например, электродных заготовок из углеграфитовых, материалов на всем пути перемещения.
Формулаизобретения
1. Тормозное устройство гравитационного конвейера, содержащее расположенный на оси на неподвижной раме ведущий тормозной грузонесущий ролик, основной пневмоцилиндр, полости которого сообщены через дроссель, а корпус установлен на неподвижной раме, и шарнирно связанный со штоком основного пневмоцилиндра управляющий рычаг, отличающееся тем что, с целью расширения эксплуатационных возможностей устройства путем обеспечения его использования при торможении хрупких грузов, рычаг выполнен одноплечим и жестко закреплен на оси ведущего
тормозного грузонесущего ролика, при этом устройство снабжено дополнительным пневмоцилиндром, шток которого шарнирно связан с управляющим рычагом, а его полости также сообщены при помощи дросселя, причем корпуса обоих пневмоцилинд- ров установлены на неподвижной раме посредством опор вращения с возможностью поворота в вертикальной плоскости при этом расположенные в вертикальной плоскости и соединяющие опоры вращения пневмоцилиндров сосью вращения ведущего тормозного грузонесущего ролика прямые образуют между собой прямой угол
2. Устройство поп.1,отличающее- с я тем, что оно имеет ведомые тормозные грузонесущие ролики, расположенные в ряд с ведущим тормозным грузонесущим роликом и связанные с ним посредством цепной передачи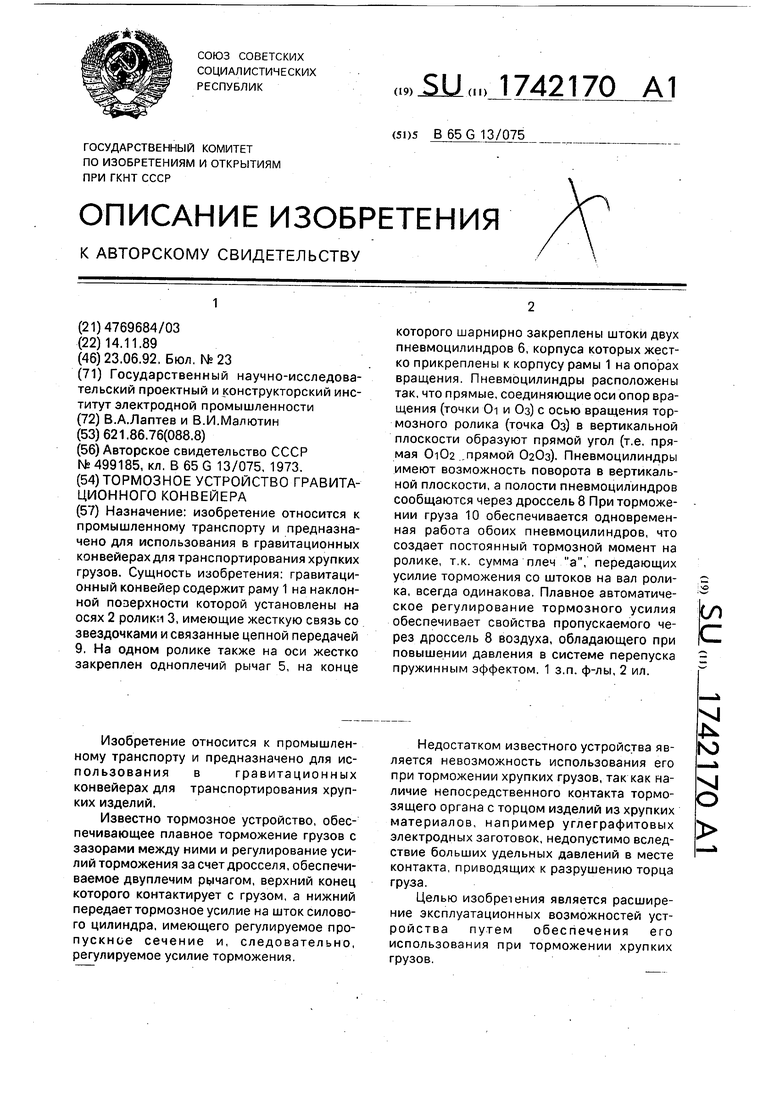

| название | год | авторы | номер документа |
|---|---|---|---|
| Тормозное устройство для грузовых тележек | 1986 |
|
SU1344668A1 |
| Рольганг для перемещения цилиндрических изделий | 1990 |
|
SU1720948A1 |
| Гравитационный роликовый конвейер | 1979 |
|
SU887370A1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| Вертикальный конвейер | 1982 |
|
SU1077829A1 |
| Конвейер для перегрузки штучных грузов | 1980 |
|
SU918194A1 |
| Комплектатор | 1988 |
|
SU1578071A1 |
| Шагающий конвейер БНЧ-2 | 1982 |
|
SU1090638A1 |
| Устройство для съема изделий с подвесного конвейера | 1988 |
|
SU1539147A1 |
| Устройство для торможения транспортируемых по гравитационным спускам штучных грузов | 1981 |
|
SU981133A1 |
Назначение: изобретение относится к промышленному транспорту и предназначено для использования в гравитационных конвейерахдля транспортирования хрупких грузов. Сущность изобретения: гравитационный конвейер содержит раму 1 на наклонной поверхности которой установлены на осях 2 ролики 3, имеющие жесткую связь со звездочками и связанные цепной передачей 9. На одном ролике также на оси жестко закреплен одноплечий рычаг 5, на конце которого шарнирно закреплены штоки двух пневмоцилиндров 6, корпуса которых жестко прикреплены к корпусу рамы 1 на опорах вращения. Пневмоцилиндры расположены так, что прямые, соединяющие оси опор вращения (точки От и Оз) с осью вращения тормозного ролика (точка Оз) в вертикальной плоскости образуют прямой угол (т.е. прямая ОЮ2 прямой ОаОз). Пневмоцилиндры имеют возможность поворота в вертикальной плоскости, а полости пневмоцилиндров сообщаются через дроссель 8 При торможении груза 10 обеспечивается одновременная работа обоих пневмоцилиндров, что создает постоянный тормозной момент на ролике, т к. сумма плеч а, передающих усилие торможения со штоков на вал ролика, всегда одинакова. Плавное автоматическое регулирование тормозного усилия обеспечивает свойства пропускаемого через дроссель 8 воздуха, обладающего при повышении давления в системе перепуска пружинным эффектом. 1 з.п. ф-лы, 2 ил. (/ С
А
1
-, nJL-M
,V-- -ч
3
фиг. 2
| Тормозное устройство для штучных грузов на конвейере | 1973 |
|
SU499185A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
