СО
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| Манипулятор | 1987 |
|
SU1537516A1 |
Использование: автоматизация технологических процессов в машиностроении. Механическая рука манипулятора состоит из основания 1, последовательно соединенных звеньев 2, первое из которых связано с основанием 1, а последнее - с захватом 3, а также приводов перемещения звеньев, каждое из которых включает приводные элементы в виде вибраторов механических колебаний, кинематически связанных с перемещаемыми звеньями 2 посредством волновой передачи. Гибкое колесо волновой передачи жестко связано с фланцем 5 перемещаемого звена, а жесткое колесо 7 этой передачи жестко связано с фланцем 5 предыдущего звена 2. Генераторы волн волновой передачи выполнены в виде двух подпружиненных сегментных элементов 8, на каждом из которых эксцентрично его оси симметрии установлен вибратор механических колебаний.3 ил.
Изобретение относится к машиностроению, а более конкретно, к конструкциям манипуляторов промышленных роботов.
Целью изобретения является расширение технологических возможностей за счет повышения маневренности звеньев.
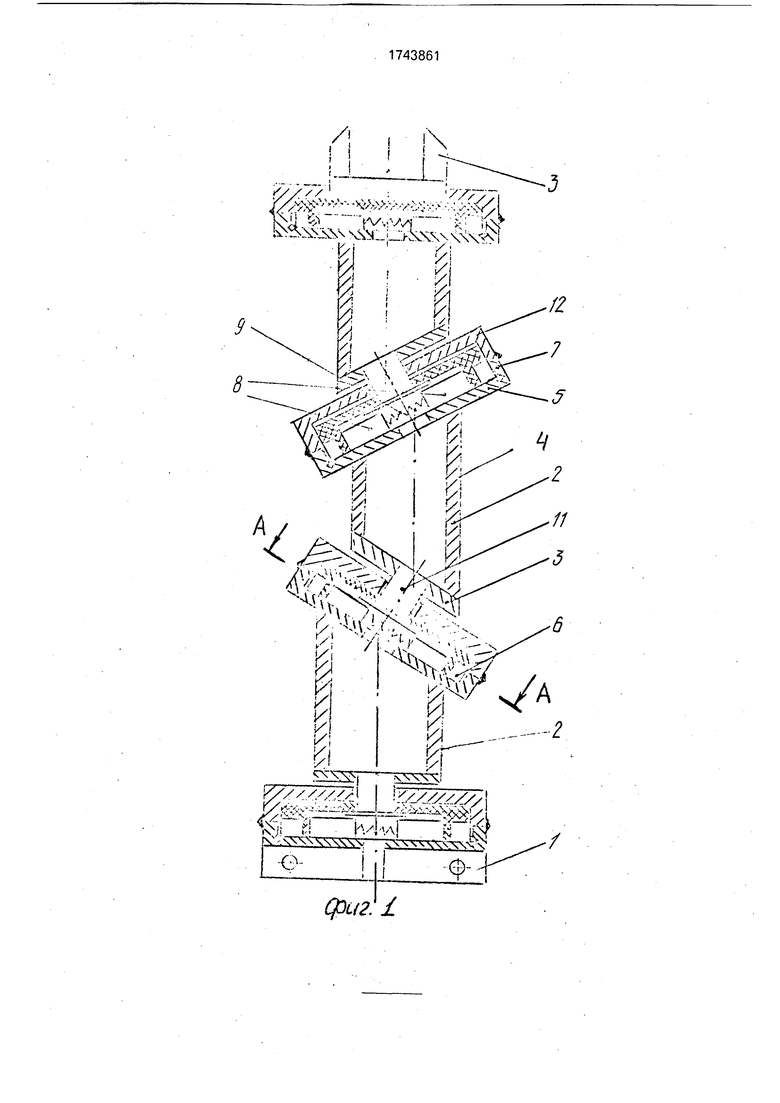
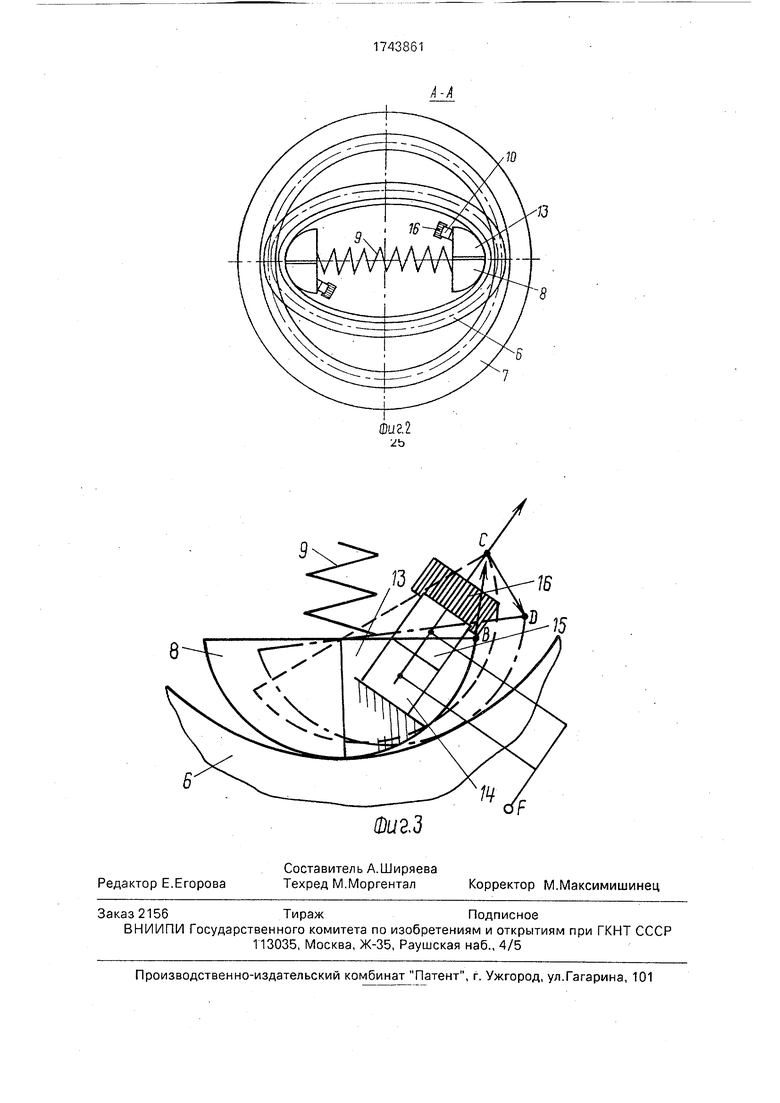
На фиг.1 показана конструкция руки манипулятора; на фиг.2 - разрез А-А на фиг.1; на фиг.З - схема перемещения приводного злемента.
Механическая рука манипулятора содержит основание 1 и последовательно соединенные звенья 2, первое из которых связано с основанием 1, а последнее - с захватом 3, и приводы перемещения звеньев. Каждое из звеньев 2 выполнено из полого корпуса 4 и двух фланцев 5, плоскости которых расположены под углом одна к другой. Привод перемещения каждого из звеньев состоит из приводных элементов, кинематически связанных с соответствующим звеном 2. Кинематическая связь приводных элементов со звеном выполнена в виде элементов передачи, гибкое колесо 6 которой жестко связано с фланцем 5 перемещаемого звена 2, а жесткое колесо 7 жестко связано с предыдущим звеном. Причем генератор волн этой волновой передачи выполнен в виде двух подпружиненных друг относительно друга сегментных элементов 8 посредством пружины 9.
Каждый из приводных элементов выполнен в виде вибратора 10 механических колебаний, установленного на соответствующем сегменте 8 эксцентрично его оси симметрии.
Гибкое зубчатое колесо 6 жестко связано с осью 11, которая в свою очередь жестко закреплена на скошенном фланце 5 звена 2. Фланец 5, на котором установлено жестко зубчатое колесо 7 с внутренним зацеплением (на фиг. 1 фланец и колесо выполнены как одно целое), закрыт крышкой 12, для предотвращения выпадения звеньев при пере2
00 00 О
мещении их друг относительно друга. В отверстии крышки 12 выполнено отверстие, которое с осью 11 представляет подшипник скольжения вращательной пары. Гибкое зубчатое колесо б, меньше по диаметру же- сткого зубчатого колеса 7 с внутренним зацеплением, входит в зацепление с жестким колесом 7 за счет сегментных элементов 8, подпружиненных относительно друг друга пружинами 9 и деформирующих за счет это- го гибкое колесо 6. На сегментных элементах 8 (см. фиг.З) в точках, не лежащих на осях этих элементов, сонаправлено с требуемым направлением вращения звена, закреплены вибраторы 10 механических колебаний. Вибраторы 10 расположены в передней части 13 сегментных элементов 8. Вибраторы 10 механических колебаний выполнены в виде пластин пьезоэлектрика, составленного из элементов 14 и 15, к которым подсое- динены электроды (см. фиг.З), связанные с источником электрических импульсов. С одной стороны такая пластина закреплена в части 13 элемента 8, т.е. в точке, смещенной к краю сегмента. С другой стороны каждой пластины закреплен груз 16.
Устройство работает следующим образом.
На вибраторы механических колебаний 10 тех звеньев, которые участвуют в переме- щении захвата 3, подаются электрические импульсы. В пластинах пьезоэлектриков возбуждаются продольные колебания при питании электрода А током высокой частоты. Элементы 14 и 15 при этом одновремен- но удлиняются или укорачиваются вдоль оси X (см. фиг.З). В начальный момент сегменты разведены пружиной 9 и деформируют гибкое зубчатое колесо 6 (точка В). Действие пружины 9 при этом и при даль- нейшей работе вибраторов аналогично действию силы тяжести при движении инерцоида, названного католетом. Аналогично схеме перемещения католета происходит и перемещение элементов 8.
При передаче импульса на электрод F таким образом, чтобы элементы 14 и 15 одновременно удлинялись, по инерции подбрасывается вслед за грузом 16 передняя часть 13 сегментного элемента 8 (точка С), преодолевает силу упругости пружины 9 и происходит незначительное перемещение элемента 8 по колесу 6. Последующий импульс, поданный на электрод F, укорачивает элементы 14 и 15 и, вслед за этим, сегмент 8 по инерции и, прижимаемый пружиной 9, начинает двигаться в обратном направлении, но не перемещается, а перекатывается цилиндрической поверхностью сегмента по
гибкому колесу 6, деформируя его (точка D). Таким образом, гасится обратная составляющая силы инерции. Следующий импульс опять удлиняет пластину вибратора и опять, вслед за этим, происходит скачок сегмента 8 по окружности гибкого колеса 6.
Такая согласованная по времени работа двух противолежащих вибраторов 10, закрепленных на паре прижимаемых пружиной 9 к гибкому колесу 6 элементов 8, вызывает перемещение этих элементов по окружности гибкого колеса 6. Гибкое колесо 6 при этом деформируется вслед за перемещаемыми вибрацией элементами 8 и само перемещается как в обычном волновом редукторе. Связанное жестко с гибким колесом 6 через ось 11 соответствующее звено 2 будет поворачиваться вместе с гибким колесом 6. При согласованном повороте, например, двух смежных звеньев в противоположные стороны будет происходить наклон руки в требуемом направлении. При отключении источника питания вибраторы 10 прекращают работу, движение прекращается, звенья 2 фиксируются в достигнутом положении за счет зацепления гибкого колеса 6 с жестким колесом 7, которое обеспечивается деформацией гибкого колеса сегментами 8, прижатыми к колесу пружиной 9.
Формула изобретения Механическая рука манипулятора, содержащая последовательно соединенные звенья, первое из которых связано с основанием, а последнее - с захватом, и приводы перемещения звеньев, причем каждое из звеньев выполнено в виде полого корпуса и двух фланцев, плоскости которых расположены под углом друг к другу, а каждый из приводов перемещений звеньев включает приводной элемент, кинематически связанный с соответствующим звеном, отличающаяся тем, что, с целью расширения технологических возможностей за счет повышения маневренности звеньев, кинематическая связь каждого из приводных элементов с соответствующим звеном выполнена в виде волновой передачи, гибкое колесо которой жестко связано с фланцем перемещаемого звена, а жесткое колесо - с фланцем предыдущего звена, причем генератор волн волновой передачи выполнен в виде двух подпружиненных друг относительно друга сегментных элементов, а каждый из приводных элементов выполнен в виде вибратора механических колебаний, установленного на соответствующем сегментном элементе эксцентрично его оси симметрии.
/
т hpvi j(
jX. - :
|лл HvVs NX S; xx-wS
,N IvWVV.. „
,
f CЈ//ii/ ///
l98Ct7il
8
Ю
15
ФигЭ
| Исполнительный орган манипулятора | 1984 |
|
SU1202855A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
