(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1980 |
|
SU984861A2 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Схват манипулятора | 1987 |
|
SU1470500A1 |
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватная головка манипулятора | 1980 |
|
SU897379A1 |
| Захват | 1982 |
|
SU1024270A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захват | 1980 |
|
SU905061A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
I
Изобретение относится к манипуляторам промышленных роботов, в частности к захватным головкам, и может быть использовано в области машиностроения для загрузки и разгрузки станков.
Известен захват манипулятора, содержаш,ий силовой цилиндр с двумя штоками, кинематически связанными с рычагами головки захвата 1.
Недостатками известного захвата является сложность конструктивной передачи усилий от штоков к губкам захватов, сложность и нетехнологичность силового цилиндра.
Целью изобретения является упрощение конструкции захвата.
Эта цель достигается тем, что штоки силового цилиндра расположены коаксиально с возможностью продольного перемещения друг относительно друга, причем внутренний шток шарнирно соединен с рычагами головки захвата, а наружный жестко соединен с этой головкой.
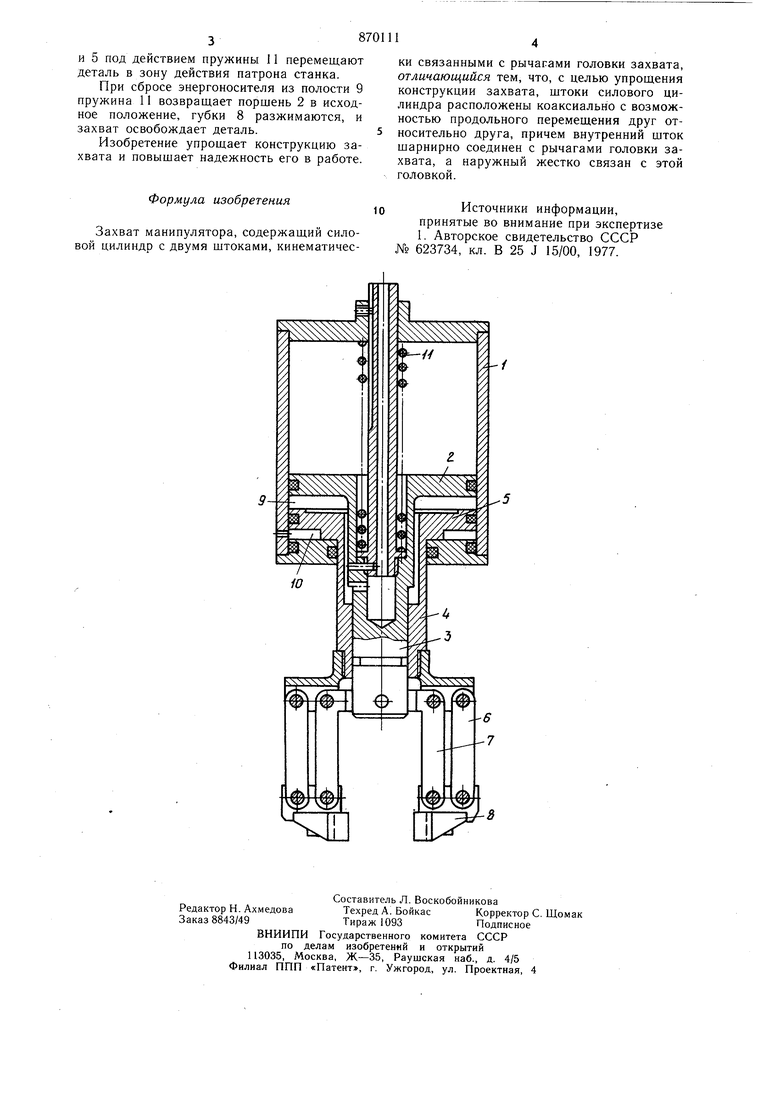
На чертеже изображен общий вид захвата.
Захват манипулятора включает корпус 1 цилиндра, в котором размешены поршень 2 со штоком 3 и коаксиально расположенным штоком 4 поршня 5. На штоке 4 смонтирована головка захвата, состоящая из рычагов 6 и 7, соединенных с зажимными губками 8 и подвижно связанных со штоком 3, между поршнями 2 и 5 находится рабочая полость 9 цилиндра, а между поршнем 5
J и корпусом I расположена рабочая полость 10.
Между крышкой корпуса 1 и поршнем 2 расположена пружина 11 для возврата поршней 2 и 5 в исходное положение.
Захват манипулятора работает следую10 шим образом.
В исходном положении оба поршня 2 и 5 смещены пружиной 11 в нижнее положение, зажимные губки 8 разведены. Для захвата заготовки в рабочую полость 9 подают энер5 гоноситель. Поршень 2 перемешается относительно поршня 5, и через шток 3, систему рычагов 6 и 7 зажимные губки 8 захватывают деталь. При подаче энергоносителя в рабочую полость 10 происходит смещение
„ обоих поршней 2 и 5 вверх и удаление детали из зоны загрузки.
При подходе захвата с деталью к месту разгрузки подают сигнал на сброс энергоносителя из полости 10, при этом поршни 2
