Изобретение относится к машиностроению, а именно к захватным устройствам роботов и манипуляторов, предназначенных для автоматизации и механизации производственных процессов.
Цель изобретения - повышение надежности работы
Поставленная цель достигается тем, что в схвате, содержащем корпус, включающий силовые цилиндры с подпружиненными поршнями со штоками, которые являются захватными элементами, причем шток каждого силового цилиндра состоит из двух подпружиненных относительно друг друга частей, контактирующих друг с другом скошенными торцами, а угол наклона торцов
относительно оси штока равен углу самоторможения, при этом на одной из двух частей каждого штока установлен штифт, имеющий возможность перемещения в пазу, выполненном в ответной части штока.
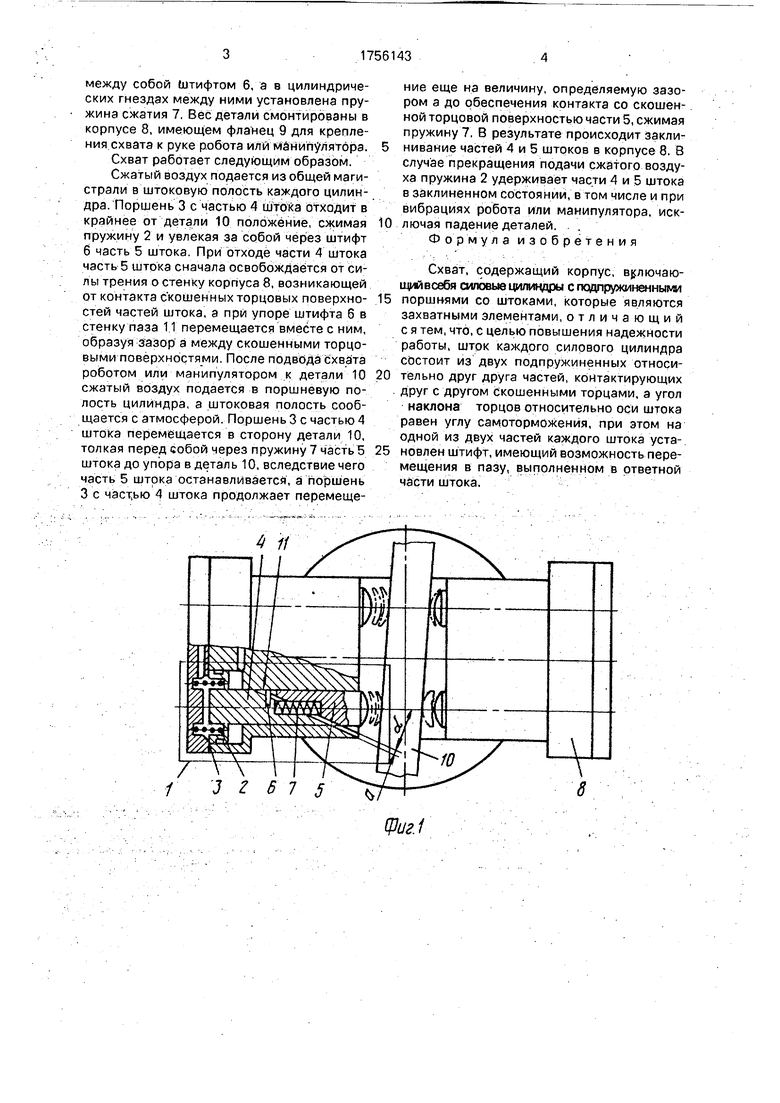
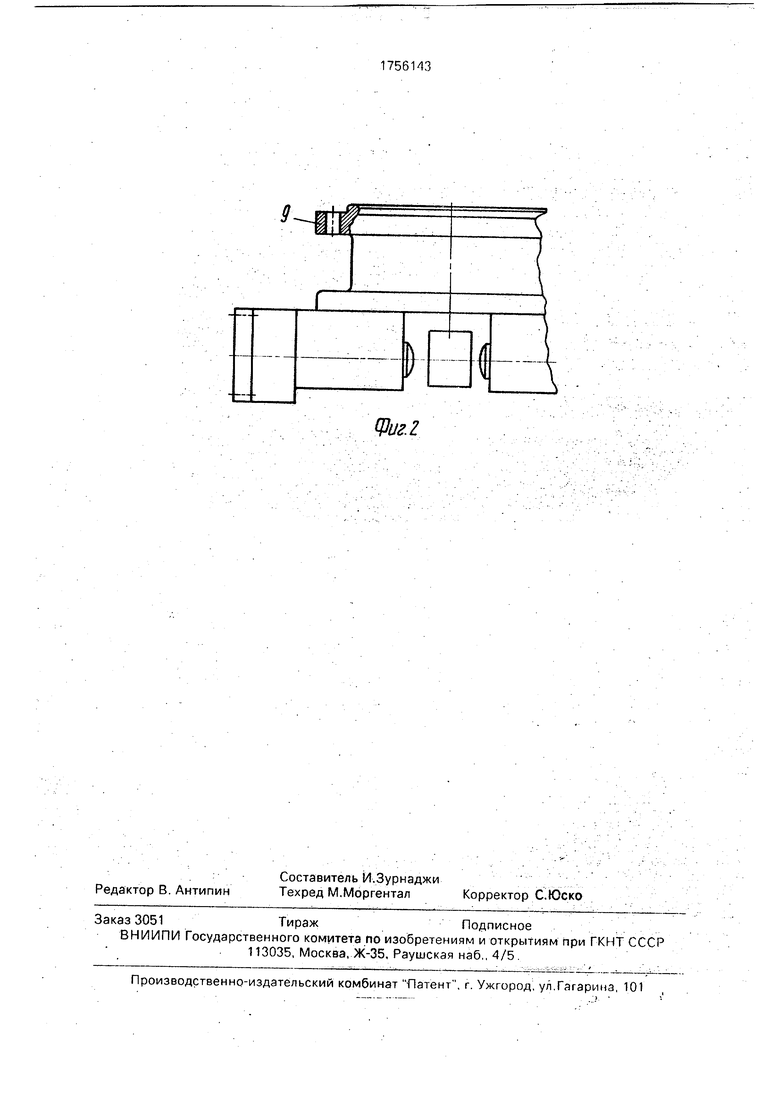
На фиг. 1 изображен схват, общий вид, на фиг 2 - то же, вид сверху. ,
Схват состоит из нескольких силовых цилиндров 1, запитанных от общей магистрали сжатого воздуха. Силовой цилиндр содержит пружину 2, поршень 3 со штоком, состоящим из двух частей4 и 5. Части штока контактируют друг с другом по скошенной торцовой поверхности с наклона а относительно оси штока, равйым углу самоторможения, асти 4 и 5 штока связаны
гл
Os
Ј
GO
между собой Штифтом 6, а в цилиндрических гнездах между ними установлена пружина сжатия 7. Вес детали смонтированы в корпусе 8, имеющем фланец 9 для крепления схвата к руке робота или манипулятора.
Схват работает следующим образом.
Сжатый воздух подается из общей магистрали в штоковую полость каждого цилиндра. Поршень 3 с частью 4 штока отходит в крайнее от детали 10 положение, сжимая пружину 2 и увлекая за собой через штифт б часть Ъ штока При отходе части 4 штока часть 5 штока сначала освобождается от силы трения о стенку корпуса 8, возникающей от контакта скошенных торцовых поверхностей частей штока, а при упоре штифта б в стенку паза 11 перемещается вместе с ним, образуя зазор а между скошенными торцовыми поверхностями. После подвода схвата роботом или манипулятором к детали 10 сжатый воздух подается в поршневую полость цилиндра, а штоковая полость сообщается с атмосферой. Поршень 3 с частью 4 штока перемещается в сторону детали 10, толкая перед собой через пружину 7 часть 5 штока до упора в деталь 10, вследствие чего часть 5 штока останавливается, а поршень 3 с частью 4 штока продолжает перемеще
ние еще на величину, определяемую зазором а до обеспечения контакта со скошенной торцовой поверхностью части 5, сжимая пружину 7. В результате происходит заклинивание частей 4 и 5 штоков в корпусе 8. В случае прекращения подачи сжатого воздуха пружина 2 удерживает части 4 и 5 штока в заклиненном состоянии, в том числе и при вибрациях робота или манипулятора, исключая падение деталей.
Формула изобретения
Схват, содержащий корпус, включающий всебя силовые цилиндры с подпружиненными
поршнями со штоками, которые являются захватными элементами, отличающий с я тем, что, с целью повышения надежности работы, шток каждого силового цилиндра состоит из двух подпружиненных относительно друг друга частей, контактирующих
друг с другом скошенными торцами, а угол
наклона торцов относительно оси штока
равен углу самоторможения, при этом на
одной из двух частей каждого штока установлен штифт, имеющий возможность перемещения в пазу, выполненном в ответной части штока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Схват | 1986 |
|
SU1390021A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
| Схват манипулятора | 1987 |
|
SU1553378A1 |
| Захватное устройство робота | 1986 |
|
SU1400877A1 |
| Захват манипулятора промышленного робота | 1990 |
|
SU1745542A1 |
| Схват промышленного робота | 1986 |
|
SU1335451A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
Изобретение относится к машиностроению, а именно к захватным устройствам ро- ботбв и манипуляторов, предназначенных для автоматизации и механизации производственных процессов. Цель изобретения - повышение надежности работы за счет внедрения блокировки на удержание детали в случае прекращения подачи сжатого воздуха. Схват состоит из нескольких силовых цилиндров I, запитанных от общей магистрали сжатого воздуха. Силовой цилиндр содержит подпружиненный поршень 3 со штоком, состоящим из двух частей 4 и 5. Части штока контактируют друг с другом по скошенной торцовой поверхности с углом наклона а относительно оси штока, равным углу самоторможения. Части 4 и 5 штока связаны между собой штифтом 6, а в цилиндрических гнездах между ними установлена пружина сжатия 7. Все детали смонтированы в корпусе 8. При подаче сжатого воздуха в поршневую полость цилиндра поршень 3 с частью 4 штока перемещается в сторону детали 10, толкая перед собой через пружину 7 часть 5 штока до упора в деталь 10, вследствие чего часть 5 штока останавливается, а поршень 3 с частью 4 штока продолжает перемещение еще на величину, определяемую зазором а до обеспечения контакта со скошенной торцовой поверхностью части 5, сжимая пружи- ну 7 В результате происходит заклинивание частей 4 и 5 штоков в корпусе 8.2 ил г ё
4 11
8
Фиг. 2
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
