СО
с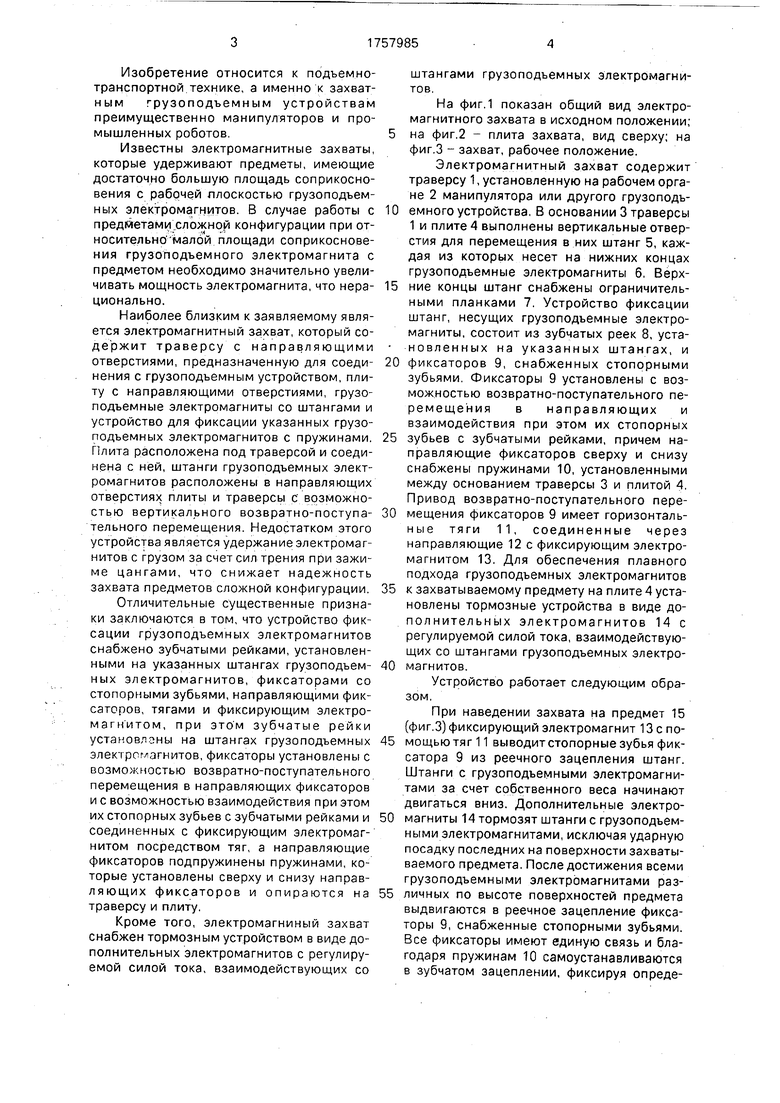
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вырубки изделий из листового и ленточного материала | 1978 |
|
SU791551A1 |
| Пресс для вырубки изделий излиСТОВОгО и лЕНТОчНОгО МАТЕРиАлА | 1978 |
|
SU795648A1 |
| Консольно-поворотный кран | 1985 |
|
SU1403549A1 |
| Шагающий конвейер | 1980 |
|
SU905167A1 |
| Способ измерения продольной жесткости ремня и жесткости его зубьев и стенд для его осуществления | 1987 |
|
SU1589100A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| Устройство для укладки короткозамкнутых витков в пазы магнитопровода электрических машин | 1983 |
|
SU1169089A2 |
| Устройство для отделения листаОТ СТОпы и пОдАчи ЕгО B РАбОчуюзОНу пРЕССА | 1979 |
|
SU804112A1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
Использование: в подъемно-транспортной технике и для манипуляторов и промышленных роботов. Сущность изобретения: содержит траверсу 1, в основании 3 и плите 4 выполнены отверстия, в которых размещены штанги 5 грузоподъемных электромагнитов 6. Штанги снабжены зубчатыми рейками 8, которые фиксируются фиксаторами 9 со стопорными зубьями, фиксаторы управляются фиксирующим электромагнитом 13, направляющие фиксаторов снабжены пружинами 10, установленными между основанием 3 и плитой 4. Для обеспечения плавного подхода электромагнитов к грузу на плите 4 установлены дополнительные тормозные электромагниты с регулируемой силой тока, взаимодействующие со штангами. 1 з.п. ф-лы. 3 ил.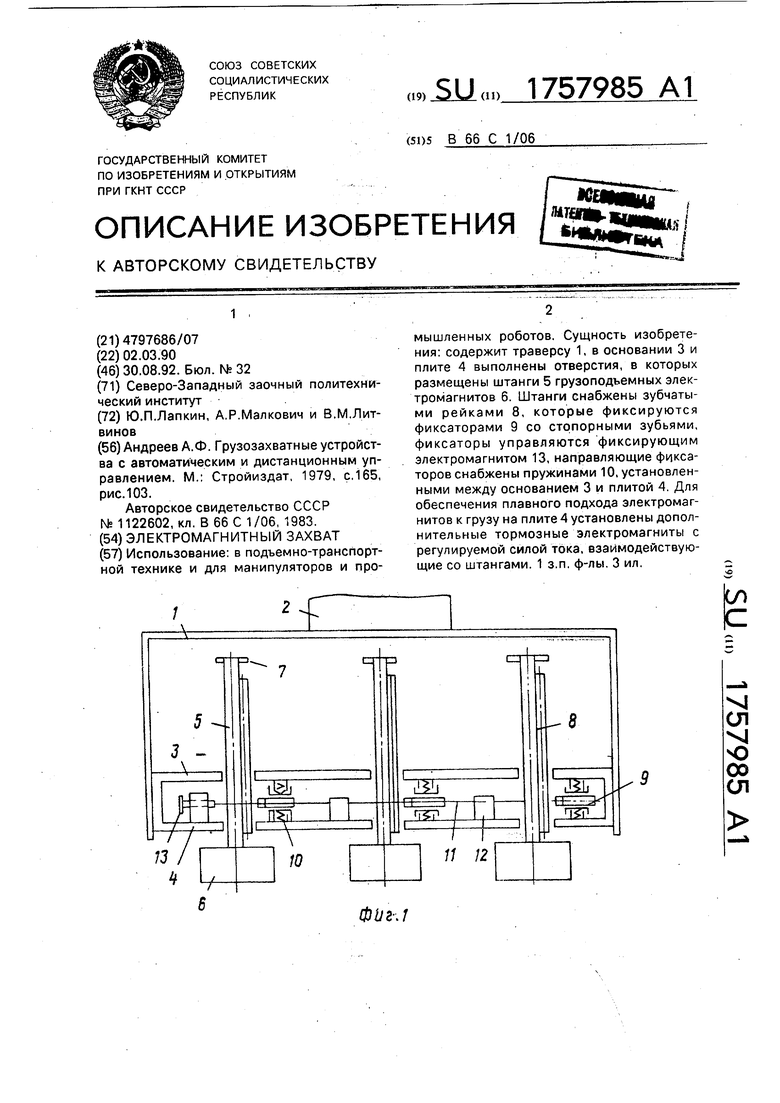
Х|
СП VJ
О 00 СЛ
Фиг-.
Изобретение относится к подъемно- транспортной технике, а именно к захватным грузоподъемным устройствам преимущественно манипуляторов и промышленных роботов.
Известны электромагнитные захваты, которые удерживают предметы, имеющие достаточно большую площадь соприкосновения с рабочей плоскостью грузоподъемных электромагнитов. В случае работы с предметами сложной конфигурации при относительно малой площади соприкосновения грузоподъемного электромагнита с предметом необходимо значительно увеличивать мощность электромагнита, что нерационально.
Наиболее близким к заявляемому является электромагнитный захват, который содержит траверсу с направляющими отверстиями, предназначенную для соединения с грузоподъемным устройством, плиту с направляющими отверстиями, грузоподъемные электромагниты со штангами и устройство для фиксации указанных грузоподъемных электромагнитов с пружинами. Плита расположена под траверсой и соединена с ней, штанги грузоподъемных электромагнитов расположены в направляющих отверстиях плиты и траверсы с возможностью вертикального возвратно-поступательного перемещения. Недостатком этого устройства является удержание электромагнитов с грузом за счет сил трения при зажиме цангами, что снижает надежность захвата предметов сложной конфигурации.
Отличительные существенные признаки заключаются в том, что устройство фиксации грузоподъемных электромагнитов снабжено зубчатыми рейками, установленными на указанных штангах грузоподъемных электромагнитов, фиксаторами со стопорными зубьями, направляющими фиксаторов, тягами и фиксирующим электромагнитом, при этом зубчатые рейки установлены на штангах грузоподъемных электромагнитов, фиксаторы установлены с возможностью возвратно-поступательного перемещения в направляющих фиксаторов и с возможностью взаимодействия при этом их стопорных зубьев с зубчатыми рейками и соединенных с фиксирующим электромагнитом посредством тяг, а направляющие фиксаторов подпружинены пружинами, которые установлены сверху и снизу направляющих фиксаторов и опираются на траверсу и плиту.
Кроме того, электромагниный захват снабжен тормозным устройством в виде дополнительных электромагнитов с регулируемой силой тока, взаимодействующих со
штангами грузоподъемных электромагнитов.
На фиг.1 показан общий вид электромагнитного захвата в исходном положении;
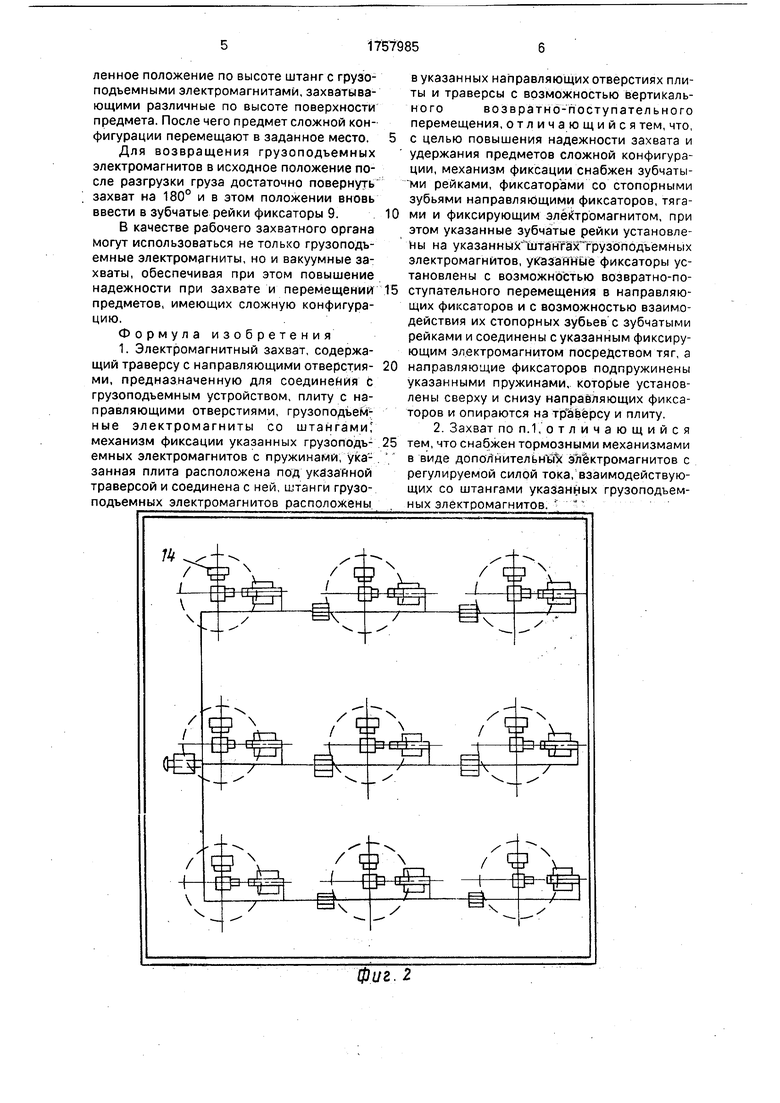
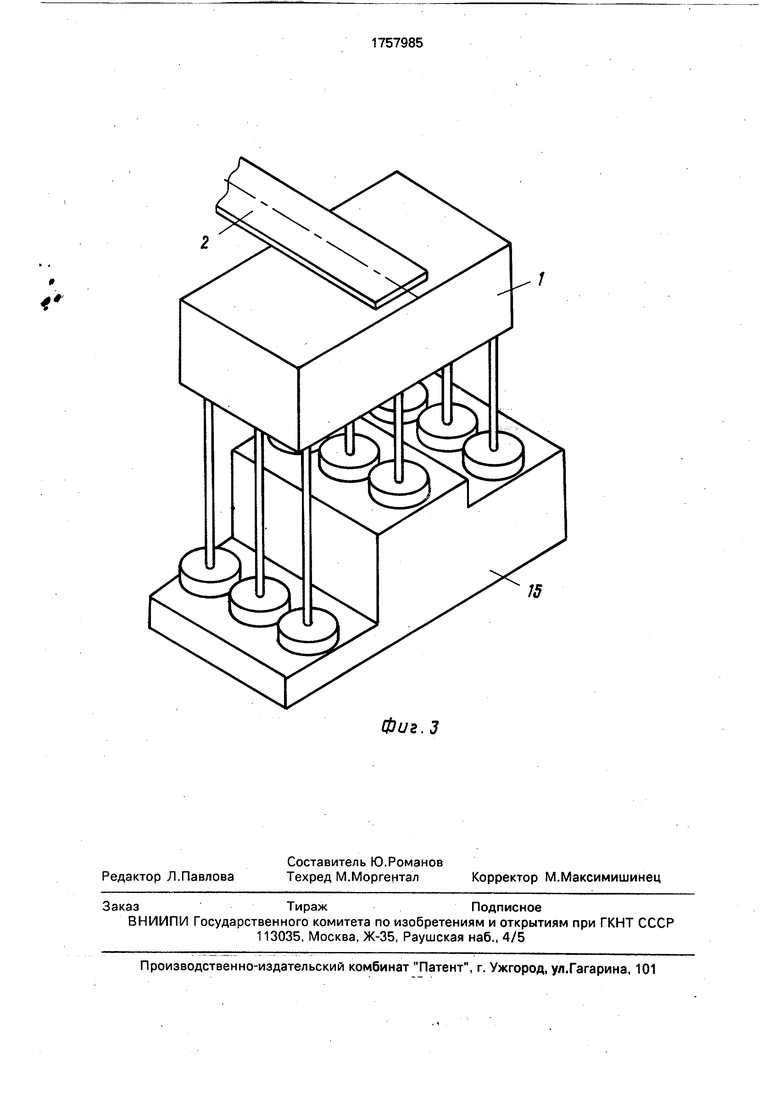
на фиг.2 - плита захвата, вид сверху; на фиг.З - захват, рабочее положение.
Электромагнитный захват содержит траверсу 1, установленную на рабочем органе 2 манипулятора или другого грузоподъ0 емного устройства, В основании 3 траверсы 1 и плите 4 выполнены вертикальные отверстия для перемещения в них штанг 5, каждая из которых несет на нижних концах грузоподъемные электромагниты 6, Верх5 ние концы штанг снабжены ограничительными планками 7. Устройство фиксации штанг, несущих грузоподъемные электромагниты, состоит из зубчатых реек 8, установленных на указанных штангах, и
0 фиксаторов 9, снабженных стопорными зубьями. Фиксаторы 9 установлены с возможностью возвратно-поступательного перемещения в направляющих и взаимодействия при этом их стопорных
5 зубьев с зубчатыми рейками, причем направляющие фиксаторов сверху и снизу снабжены пружинами 10, установленными между основанием траверсы 3 и плитой 4. Привод возвратно-поступательного пере0 мещения фиксаторов 9 имеет горизонтальные тяги 11, соединенные через направляющие 12 с фиксирующим электромагнитом 13. Для обеспечения плавного подхода грузоподъемных электромагнитов
5 к захватываемому предмету на плите 4 установлены тормозные устройства в виде дополнительных электромагнитов 14 с регулируемой силой тока, взаимодействующих со штангами грузоподъемных электро0 магнитов.
Устройство работает следующим образом.
При наведении захвата на предмет 15 (фиг.З) фиксирующий электромагнит 13 с по5 мощьютяг11 выводит стопорные зубья фиксатора 9 из реечного зацепления штанг. Штанги с грузоподъемными электромагнитами за счет собственного веса начинают двигаться вниз. Дополнительные электро0 магниты 14 тормозят штанги с грузоподъемными электромагнитами, исключая ударную посадку последних на поверхности захватываемого предмета. После достижения всеми грузоподъемными электромагнитами раз5 личных по высоте поверхностей предмета выдвигаются в реечное зацепление фиксаторы 9, снабженные стопорными зубьями. Все фиксаторы имеют единую связь и благодаря пружинам 10 самоустанавливаются в зубчатом зацеплении, фиксируя определенное положение по высоте штанг с грузоподъемными электромагнитами, захватывающими различные по высоте поверхности предмета. После чего предмет сложной конфигурации перемещают в заданное место.
Для возвращения грузоподъемных электромагнитов в исходное положение после разгрузки груза достаточно повернуть захват на 180° и в этом положении вновь ввести в зубчатые рейки фиксаторы 9.
В качестве рабочего захватного органа могут использоваться не только грузоподъемные электромагниты, но и вакуумные захваты, обеспечивая при этом повышение надежности при захвате и перемещении предметов, имеющих сложную конфигурацию.
Формула изобретения
в указанных направляющих отверстиях плиты и траверсы с возможностью вертикальноговозвратно-поступательногоперемещения, отличающийся тем, что,
с целью повышения надежности захвата и удержания предметов сложной конфигурации, механизм фиксации снабжен зубчаты- ми рейками, фиксаторами со стопорными зубьями направляющими фиксаторов, тягами и фиксирующим электромагнитом, при этом указанные зубчатые рейки установлены на указанных штанТа Ггрузоподъемных электромагнитов, указанные фиксаторы установлены с возможностью возвратно-поступательного перемещения в направляющих фиксаторов и с возможностью взаимодействия их стопорных зубьев с зубчатыми рейками и соединены с указанным фиксирующим электромагнитом посредством тяг, а
направляющие фиксаторов подпружинены указанными пружинами, которые установлены сверху и снизу направляющих фиксаторов и опираются на траверсу и плиту. 2. Захват по п.1,отличающийся
тем, что снабжен тормозными механизмами в виде дополнительный электромагнитов с регулируемой силой тока, взаимодействующих со штангами указанных грузоподъемных электромагнитов.
фиг. 2
15
Фиг. 3
| Андреев А.Ф | |||
| Грузозахватные устройства с автоматическим и дистанционным управлением | |||
| М.: Стройиздат, 1979, с.165, рис.103 | |||
| Электромагнитное захватное устройство | 1983 |
|
SU1122602A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
