Изобретение относится к обработке металлов давлением, в частности к оборудованию для гибки листового материала.
Известен узел ориентации заготовок к листогибочной машине, содержащий стол ориентации с управляемыми продольными и поперечными упорами,манипулятору с приводом перемещения от УЧПУ,средства прижима, подъема и поворота листа.
Известен также узел - ориентации заготовок к листогибочной машине, GO-, держащий стол ориентации листовых заготовок с продольными и поперечными упорами, установленными с возможное-- , тыо перемещения в вертикальной плоское ти} индивидуальные приводы горизонтального перемещения поперечных упоров, манипулятор позиционирования заготовок с дополнительными продоль- ными упорами, которые смонтированы с
возможностью перемещения в вертикальной плоскости.Недостатком описанного узла ориентации заготовок является не- достаточно высокое качество получаемых деталей, обусловленное тем, что не обеспечивается надежная фиксация заготовки в ориентированном положении, особенно, при перехвате заготовки и не исключается деформация листа при ориентации.
Цель изобретения - повышение качества изготавливаемых деталей.
Поставленная цель достигается тем, что узел ориентации заготовок, содержащий стол ориентации листовых заготовок с продольными и поперечными упорами, расположенными симметрично относительно продольной его оси и установленными с возможностью перемещения в вертикальной плоскости, индивидуальные приводы горизонтального перемещения поперечных упоров, манисл
с
о
-eJ
ы
оэ о
317
пулятор позиционирования заготовок с дополнительными продольными упорами, смонтированными с возможностью перемещения в вертикальной плоскости и противолежащими продольными упорами стола ориентации, систему управления, он снабжен датчиками касания упоров с листом, связанными с системой управления и смонтированными на продольных и поперечных упорах, упругими компенсаторами, продольные упоры стола ориентации выполнены в виде нижнего и верхнего прижимов, трехка- мерного пневмоцилиндра, содержащего поршень с полым штоком и шток, размещенный соосно внутри поршня с полым штоком с возможностью перемещения относительно последнего, а нижний и верхний прижимы размещены на поршне с полым штоком и штоке, поперечные упоры выполнены в виде двух пар роликов, а дополнительные упоры манипулятора - в виде роликов, упругие компенсаторы установлены на поперечных упорах стола ориентации и дополнительных упорах манипулятора. Причем упругие компенсаторы выполнены в виде резиновых втулок.
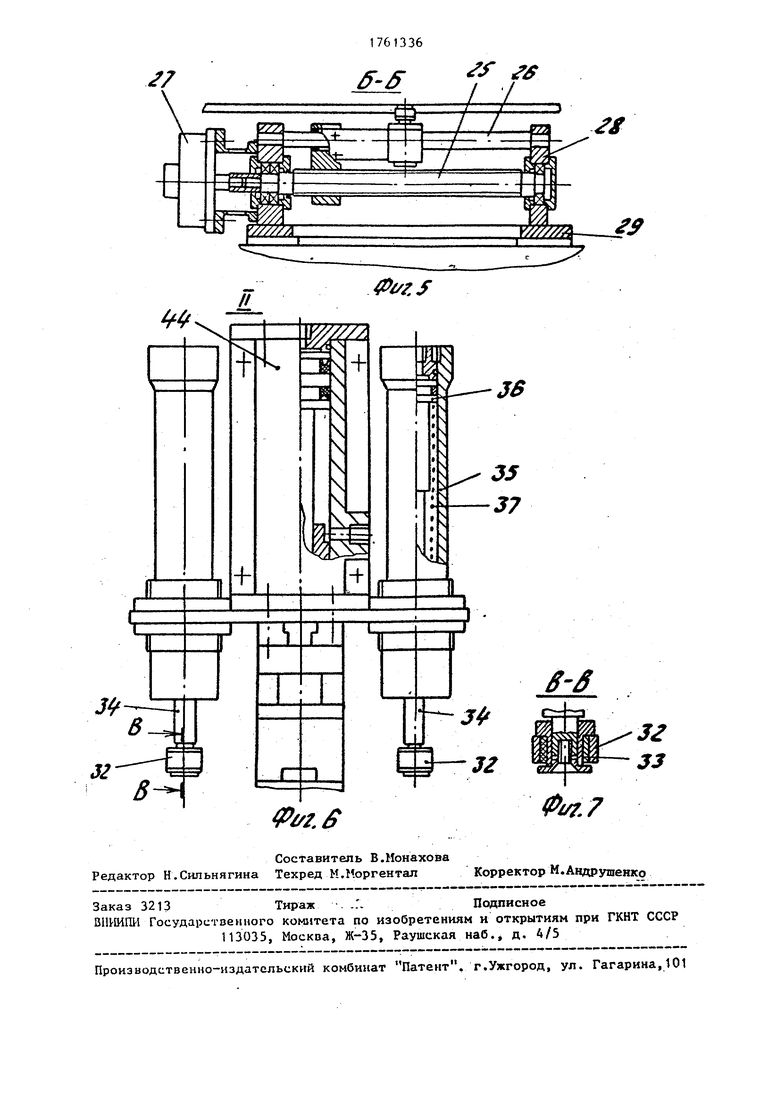
На сЪиг.1 изображен узел ориентации заготовок к листогибочной машине, вид сбоку1, на фиг.2 - кинематическая схема узла ориентации заготовок; па фиг.З - узел I на фиг.1 в разрезе по продольному упору стола ориентации; на фиг.4 - поперечные упоры в сечении А-А на фиг.2; на фиг.З - поперечные упоры i в сечении Б-Б на фиг.4; на фиг.6 - узел II на фиг.1 - дополнительные упоры манипулятора; на фиг.7 - сечение В-В на фиг.6.
Узел ориентации заготовок к листогибочной машине 1 содержит примыкающий к машине с фронта стол ориен-. тации 2, манипулятор 3 позиционирования заготовок, смонтированные в столе ориентации симметрично его продольной оси две пары продольных упоров 4, выполненных в виде нижнего 5 и верхнего 6 прижимов, трехкамерно- го пневмоцилиндра 7, содержащего порпень 8 с полым штоком 9 и шток 10, размещенный соосно внутри поршня 8 с полым штоком 9 с возможностью перемещения относительно последнего. Пток 10 йвязан с поршнем 11. Верхний 6 и нижний 5 прижимы, размещены на поршне 8 с полым штоком 9 и штоке 10,
0
3364
Пневмоцилиндр 7 установлен на столе ориентации посредством изолирующего элемента 12. К корпусу пневмоцилиндра 7 подсоединен датчик касания 13, электрически (связанный с системой 14 ЧПУ. В никнем конце штока 10, проходящего через крышку 15, установлен флажок 16, взаимодействующий с конечными выключателями 17.
На столе 2 симметрично относительно его продольной оси по обе его CJTO- роны размещены поперечные упоры 18, выполненные в виде двух пар роликов
с 19, подпружиненных в горизонтальном направлении упругими компенсаторами 20 в виде резиновых втулок и установленными в верхней части штоков 21 пневмоцилиндров одностороннего дей0 ствия 22, размещенных посредством изолирующих элементов 23 на каретке 24. Каретка 24 установлена на направляющей 25 и взаимодействует с винтом 26 и электромотором 27. Винт 26 и
5 направляющая 25 с помощью стоек 28 смонтированы на плите 29, установленной на столе ориентации 2. К корпусу каждого пневмоцилиндра 22 подключен датчик касания 30, электрически свяо занный с системой 14 ЧПУ.
Манипулятор 3 снабжен дополнительными продольными упорами 31, выполненными в виде роликов 32 и установ- лениыми посредством упругих компенсаторов 33, выполненных в виде резиновых втулок и размещенных на штоках 34 цилиндров одностороннего действия 35, поршни которых 36 подпружинены в вертикальном направлении пружинами 37. Манипулятор 3 имеет привод его перемещения в виде винтовой пары 38 и электромотора 39, механизм поворота листа 40, выполненный в виде червячного редуктора 41, электромотора 42 и опорного элемента 43.
Цилиндр прижима 44 листа 40, расположенный в верхней части манипулятора 3, снабжен штоком 45, на котором с помощью подшипников 46 установлен поворотный элемент 47 прижима листа 40. Система 14 ЧПУ координирует работу всех механизмов.
Машина работает следующим образом.
Лист 40 средствами механизации
5 укладывается на стол 2 между раздвинутыми упорами 4 и 18, при этом манипулятор 3 находится в крайнем заднем положении, а упоры 31 мани0
0
17
пулятора находятся в поднятом положении.
В поршневые полости пневмоцилинд- ров 22 подается давление и поперечные упоры 18 поднимаются вверх, выше кромок стола и обрабатываемого листа 40,
По команде от УЧПУ посредством электромотора 27 и винта 25 поперечные упоры 18 перемещаются к центру оси стола ориентации 2. Ролики 19 толкают лист 40 с боков, устанавливают и центрируют его по центру оси стола ориентации 2 до замыкания четырех контактов датчиков касания 30, которые отключают электромотор 27 и останавливают встречное перемещение упоров 18. Происходит ориентация листа вдоль оси стола ориентации.
При обработке листа больше и меньше заданного ЧПУ перемещения упоров 18 или при наличии непараллельности боковых кромок листа 40, разность перемещения упоров 18 с двух сторон в горизонтальном направлении компенсируется за счет деформации упругих компенсаторов 20. При этом исключается деформация листа по его плоскости и не нарушается положение центра листа 40 относительно продольной оси стола ориентации.
Далее подается давление в полости а и в одной из пар пневмоцилинд- ров 7 и поршни 8, 11 вместе с соответствующими штоками 9, 10 и прижимами 5, 6 поднимаются вверх.
Продольные упоры 4 устанавливаются в рабочее положение. Раскрывается расстояние между прижимами 6 и 5, обеспечивая свободный проход листа 40 для упора с прижимами. Одновременно подается давление в поршневые полости цилиндров 35 и упоры 31 манипулятора 3 опускаются в рабочее положение. Манипулятор 3 по команде от ЧПУ 14 под действием электромотора
39и винтовой пары 38 перемещается вперед к рабочему пространству машины 1. При этом упоры 31 касаются задней кромки листа 40 и передвигают его в четырех роликах 19 поперечных упоров 18, которые обеспечивают фиксированное относительно продольной оси стола ориентации направление перемещения. При движении вперед лист
40упирается в прижимы 5 двух пар пневмоцилиндров 7. При касании листа 40 с прижимом 5 происходит контакта66
рование с датчиком касания 13 и даются команды)на останов манипулятора
3и на подачу давления в полости б соответствующей пары пневмоцилиндров 7. Прижим 5 со штоком 10 и прижимом 6 перемещаются вниз и происходит зажим листа 40 и неподвижное фиксирование его относительно стола
2. Манипулятор 3 продолжает по инер- . ции двигаться вперед. При этом упругие компенсаторы 33 компенсируют перемещение манипуля.тора 3 с сохранением фиксированного положения листа,
.Далее снимается давление в поршневых полостях упоров 31, которые возвращаются в верхнее положение под действием пружины 37 и штоков 34. При этом (ролики 32, контактирующие с задней
кромкой листа 40, поднимают заднюю часть листа 40. В верхнем положении ролики 32 выходят из зацепления с кромкой листа и он падает под действием веса на стол ориентации. При этом
лист сохраняет ориентацию относительно всех упоров.
Манипулятор 3 по команде от ЧПУ 14 посредством электромотора 39 и винтовой пары 38 перемещается вперед
и затем с помощью поворотного элемента 4 7 и опорного элемента 43 устанавливается в средней части листа,- Подается давление в поршневую поло сть цилиндра 44 и лист 40 зажимается с
помощью поворотного элемента 47 и
опорного элемента 43. Подается команда от ЧПУ 14 на возврат в исходное положение поперечных упоров 18 под действием -электромотора 27 и винтов
25. Снимается давление в поршневых
полостях цилиндров 22 упоров 18, ко- торые посредством пружин опускаются вниз, ниже верхнего уровня стола ориентации 2. Подается давление в полости в цилиндров 7. Прижимы 6 упоров
4разжимают лист и манипулятор 3 по команде от ЧПУ совершает вместе с листом 40 ход назад. Передняя кромка листа выходит из зоны прижима упорами 4, которые под действием поданного в полость б давления опускаются вниз, ниже верхнего уровня стола ориентации 2, который освобождается для работы манипулятора 3 с листом
40
Манипулятор 3 по команде от системы 14 ЧПУ под действием электромотора 39 и винтовой пары 38 вводит переднюю кромку листа в рабочую зону мамины, где производится прижим листа на станине машины 1 и гибка бурта листа. Вывод листа манипулятором 3 из рабочей зоны и его поворот на 180° производится под действием червячного редуктора 41, опорного 43 и поворотного 47 элементов по команде от системы 14 ЧПУ.
Далее описанным способом произво- дится подача противоположной кромки листа в рабочую зону машины, производится зажим, гибка, разжим, возврат листа на позицию поворота, где осуществляется поворот листа на 90°. Затем все операции повторяются. После гибки всех четырех кромок листа манипулятор устанавливает готовую деталь на позицию выгрузки. Подается давление в штоковую полость цилинд- ров 44 и : поворотный элемент 47 освобождает деталь. Манипулятор 3 по команде от ЧПУ под действием электромотора 39 и винтовой пары 38 возвращается в исходное положение.
Деталь средствами выгрузки снимается со стола ориентации и новая заготовка укладывается на него. Предлагаемое изобретение позволяет повысить качество готовых изделий путем обеспечения строгой параллельности листа относительно продольной оси стола. Прижим листа -на продольных упорах обеспечивает точное ориентированное положение листа в момант захвата и перехвата манипулятором, при этом точность ориентации сохраняется на протяжении всего процесса гибки, что повышает качество готовых деталей. Наличие упругих компенсаторов на поперечных упорах и дополнительных упорах манипулятора исключает деформацию листа, а наличие датчиков касания на продольных и поперечных упорах способствует повышению точности останова упоров и, в конечном итоге, точности ориентации и качества из делий.
5
0 0 с
5
Формула изобретения
1.Узел ориентации заготовок преимущественно к листогибочной машине, содержащий стол ориента ции листовых заготовок с продольными и поперечными упорами, расположенными симметрично относительно продольной его оси, установленными с возможностью перемещения в вертикальной плоскости, индивидуальные приводы горизонтального перемещения поперечных упоров, манипулятор позиционирования заготовок с дополнительными продольными упорами, смонтированными с возможностью перемещения в вертикальной плоскости,
и противолежащими продольным упорам стола ориентации, систему управления, отличающийся тем, что, с целью повышения качества изготавливаемых деталей, он снабжен датчиками касания упоров с листом, связанными с системой управления и смонтированными на продольных и поперечных упорах, упругими компенсаторами, продольные упоры стола ориентации выполнены в виде нижнего и верхнего прижимов, трехкамерного пневмо- цилиндра, содержащего поршень с полым штоком и шток, размещенный со- осно внутри поршня с полым Штоком с возможностью перемещения относительно последнего, а нижний и верхний прижимы размещены на поршне с полым штоком и штоке, размещенном соосно внутри поршня с полым штоком, поперечные упоры выполнены в виде двух пар роликов, а дополнительные упоры манипулятора - в виде роликов, упругие компенсаторы установлены на поперечных упорах стола ориентации и дополнительных упорах манипулятора.
2.Узел поп.1, отличающийся тем, что упругие компенсаторы выполнены в виде резиновых втулок.
/
Фм./
7Г
J
дг

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации заготовки к листогибочной машине | 1991 |
|
SU1780904A1 |
| Узел ориентации заготовок к листогибочной машине | 1987 |
|
SU1523212A1 |
| Робот | 1991 |
|
SU1781026A1 |
| Устройство для ориентации подачи заготовок в зону обработки | 1985 |
|
SU1430150A1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Круглошлифовальный станок с ЧПУ | 1977 |
|
SU1144852A1 |
| Устройство для поштучной выдачи листов из стопы | 1988 |
|
SU1595770A1 |
| Пильно-обрабатывающее устройство для обработки пластикового профиля | 2019 |
|
RU2710702C1 |
| Станок с ЧПУ для заточки инъекционных игл одноразовых шприцов | 1990 |
|
SU1774911A3 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |


Использование: обработка метал-. лов давлением, гибка листового материала. Сущность изобретения: узел содержит стол ориентации, манипулятор позиционирования заготовок, смонтированные в столе ориентации продольные и поперечные упоры. Продольные и поперечные упоры снабжены датчиками касания упоров с заготовкой. На поперечных упорах стола ориентации и дополнительных упорах манипулятора установлены упругие компенсаторы. Продольные упоры стола ориентации выполнены в виде нижнего и верхнего прижимов, размещенных на трехкамер- ном пневмоцилиндре. 1 з.п. ф-лы, 7 ил.
J/
ЙХЛ/
Pvt.J
J-J
/s
| Устройство к ножницам для остановки проката | 1988 |
|
SU1532212A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
