Фм.1
Изобретение относится к устройствам для удержания и переноса деталей в зону обработки и может быть использовано в конструкции роботов и манипуляторов.
Известны вакуумные захваты, содержащие присоски, связанные трубопроводом с системой вакуумирования и снабженные механизмом девакуумирования. Такие захваты предназначены для переноса деталей заданных габаритов.
Известны.вакуумные захваты, снабженные датчиками .вакуумирования присосок. Например, вакуумный захватный орган содержит датчик вакуумирования, выполненный в виде пружины из то ко проводящего материала. Функции датчика вакуумирования в этом устройстве ограничены сигнализацией об отсутствии или наличии вакуума.
Ближайшим к изобретению техническим решением является вакуумный захват, содержащий две концентрично расположенные присоски, трубопровод, соединенный с системой вакуумирования, и узел связи между полостями внешней и внутренней присосок. Устройство предназначено для захвата одинаковых по форме и размерам деталей.
Недостатком этого захвата является его ограниченная функциональность. Оно не может обеспечить присасывания и перенос деталей, форма и размеры которых р злич- ны.
Целью изобретения является расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что корпус выполнен в виде трубопровода, посредством которого внутренняя присоска соединена с вакуумной системой. При этом наружная присоска установлена на трубопроводе с возможностью осевого перемещения и подпружинена относительно внутренней присоски, причем в теле наружной присо- ски и в трубопроводе выполнены сквозные каналы, имеющие возможность совмещения при перемещении наружной присоски и подключения ее полости к вакуумной системе.
На фиг. 1 показан общий вид предлагаемого захвата; на фиг. 2 - положение узлов и элементов захвата при удержании заготовки больших размеров.
Захват содержит корпус, выполненный в виде трубопровода 1, подключенного к вакуумной системе 2, На другом конце трубопровода закреплена присоска 3. На втулке 4, герметично посаженной на трубопровод 1, закреплена присоска 5. Диаметр присоски 5 больше диаметра присоски 3. Диаметр присоски 3 выбирают таким, чтобы
ее рабочая поверхность полностью размещалась на поверхности наименьшей из планируемых к перемещению данным захватом детали б. Диаметр присоски 5 выбран таким, чтобы ее рабочая поверхность полностью размещалась на поверхности наибольшей из деталей, которая может быть надежно удержана присоской наименьшего диаметра. Втулка 4, на которой закреплена присоска 5, установлена с возможностью
осевого перемещения по трубопроводу, ограниченного кольцом 7 и пружиной 8. Пру- жина 8 стремится прижать втулку 4 к кольцу 7. Жесткость пружины 8 выбрана такой, чтобы она не деформировалась под действием
веса кольца 7 и прикрепленных к ней элементов конструкции присоски 5, но чтобы она полностью сжалась при дополнительном воздействии веса наименьшей из заго- товок. размер которой обеспечивает
крепление на ней присоски 5.
Во втулке 4 выполнен канал 9, открытый в полость присоски 5 и к поверхности трубопровода 1. В трубопроводе 1 выполнено поперечное отверстие 10, открытое в систему вакуумирования и выходящее на наружную поверхность трубопровода. Отверстие 10 и канал 9 смещены друг относительно друга в осевом направлении и может совмещаться только при полном сжатии пружины
8. Рабочая поверхность присоски 5 расположена ниже, чем рабочая поверхность присоски 3.
Формула изобретения
Вакуумный захват, содержащий корпус, на котором концентрично установлены присоски, каждая из которых соединена с вакуумной системой, отличающийся тем, что, с целыо расширения функциональных
возможностей, ,орпус выполнен в виде трубопровода, посредством которого внутренняя присоска соединена с вакуумной системой, при этом наружная присоска установлена на трубопроводе с возможностью осевого перемещения и подпружинена относительное внутренней присое,и, причем в теле наружной присоски и в трубопроводе выполнены сквозные каналы, имеющие возможность совмещения при перемещснии наружной присоским подключения ее полости к вакуумной системе.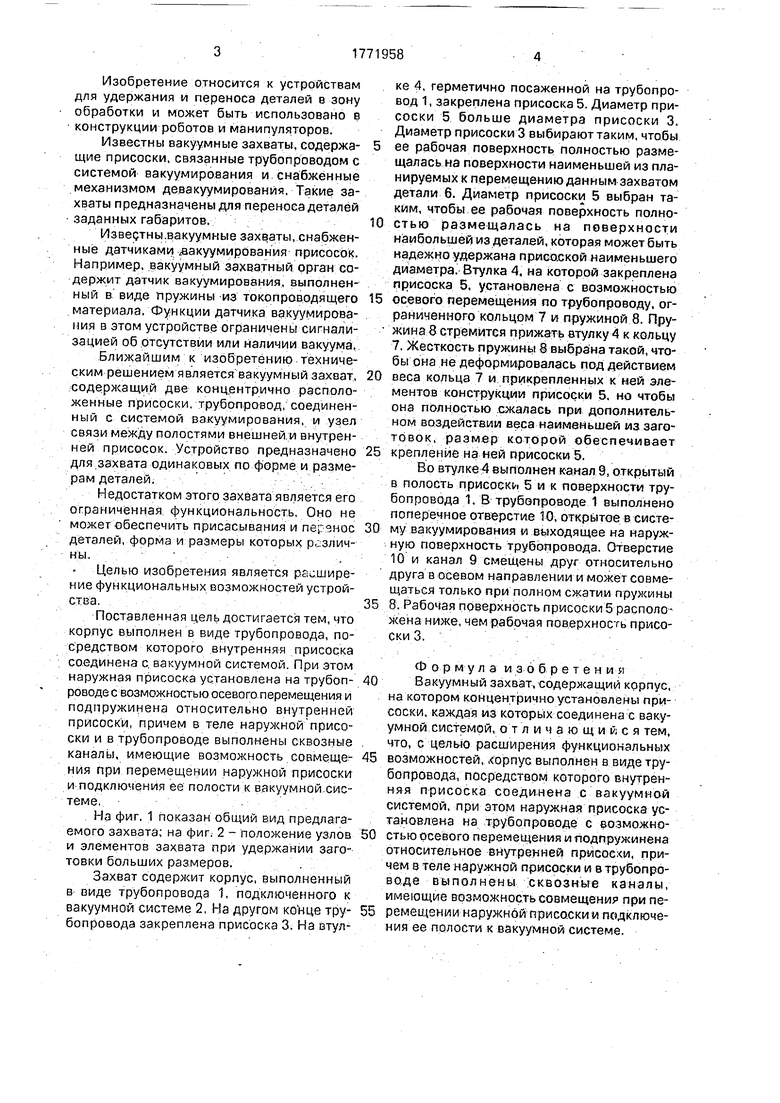
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1988 |
|
SU1705068A1 |
| Схват манипулятора | 1985 |
|
SU1585149A1 |
| Устройство для транспортирования кольцевых изделий | 1976 |
|
SU586604A1 |
| Устройство для закрепления тонкостенной нежесткой детали при обработке | 2015 |
|
RU2620524C2 |
| ГИБКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА БАЗИРОВАНИЯ | 2012 |
|
RU2495738C1 |
| Вакуумное захватное устройство | 1987 |
|
SU1445957A1 |
| Устройство для захвата и транспортирования изделий | 1978 |
|
SU672052A1 |
| СПОСОБ ФИКСАЦИИ НЕЖЕСТКОЙ ЗАГОТОВКИ СЛОЖНОГО ПРОФИЛЯ И ПРИСПОСОБЛЕНИЕ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2018 |
|
RU2701815C1 |
| Устройство для перемещения сыров | 1990 |
|
SU1738175A1 |
| Вакуумное захватное устройство | 1984 |
|
SU1215999A1 |
Использование изобретения: для захвата и переноски деталей. Сущность изобретения: на трубопроводе 1 концентрично установлены присоски 3 и 5. Присоска 5 подпружинена относительно присоски 3 и в ней выполнен канал 9, который совмещается с каналом 10 при перемещении лрисоски 5 по трубопроводу и подключает ее полость к вакуумной системе 2. 2 ил.
Фиг. 2
| Вакуумный захват | 1979 |
|
SU839968A1 |
