Известны устройства с жесткой отрицательной обратной связью по скорости, в которых, с целью компенсации скоростной ошибки, используется сигнал тахогенератора, связанного с задающим валом.
Предложенное устройство отличается тем, что вход вспомогательной импульсной системы через коммутирующий ключ подключен одновременно к принимающему тахогенератору следящего привода и выходному потенциометру вcпoмoгaтev ьнoй импульсной следящей системы, который подключен к цепи управления основного следящего привода. Это значительно повышает точность следящего привода.
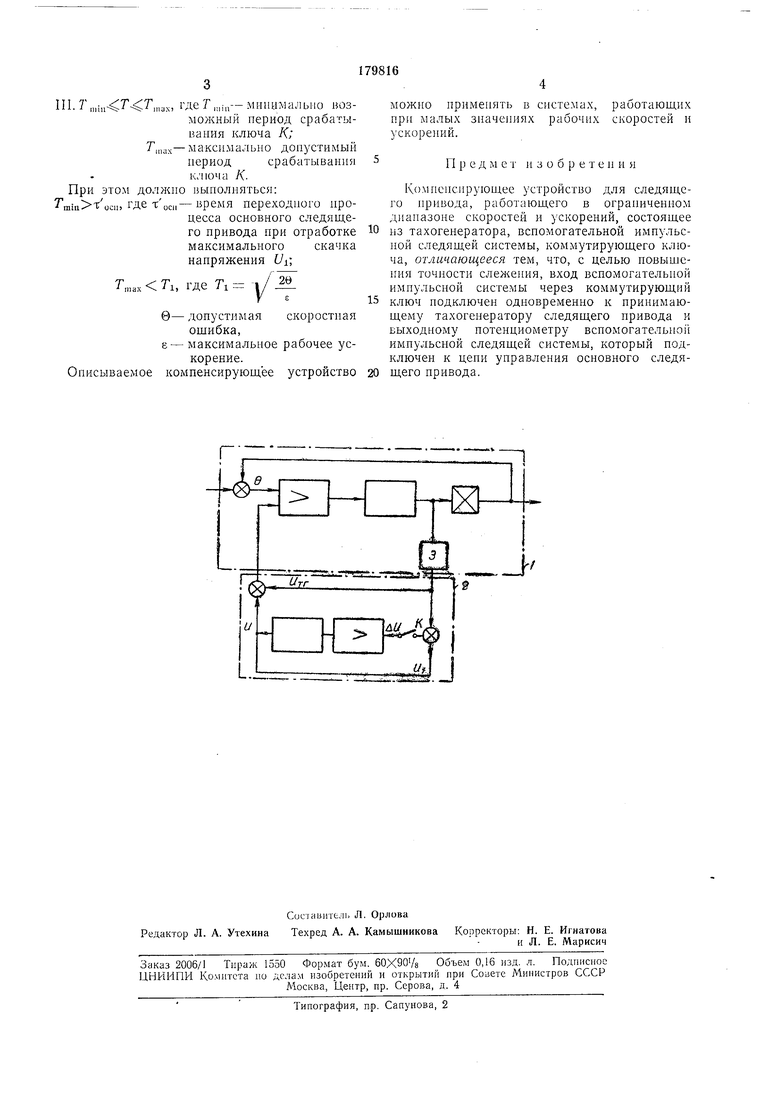
На чертеже изображена блок-схема основного следящего привода / (ОСП) со вспомогательной импульсной следящей системой 2 (ВИСС), выдающей сигнал для компенсации скоростной ощибки осиовного следящего привода.
На вход висе через ключ К периодически подается разность &U напряжения Утг принимающего тахогенератора 3 основного следящего привода и напряжения f/i потенциометра (или линейного вращающегося трансформатора), установленного па выходном валу висе.
в течение /i сек, причем . Время t должно быть достаточным для активизации импульсной системы. При разомкнутом ключе Д выходной вал
висе неподвижен. Если начальное рассогласование AL велико, а скорость основного привода изменяется незначительно, то через несколько срабатываний ключа /С будет достигаться следующее соотношение:
При малых значеинях рабочих ускорений это соотношение выполняется практически для любых значений скорости.
Сигнал L/1 с выхода импульсной системы одновреме1 но нспользуется (в соответствующем масштабе) для компенсации скоростной ощибкн основного следящего привода.
Для устойчивой и качественпой работы основного следящего привода совместно с висе пеобходимо выполнение следующих
соотнощений:
I- Треп 1. где /1 - время замыкания К:
TOCII - эквивалентная постоянная времени основного следящего привода при скачкообразном изменении напряжения t/i;
III. 7 „iiii- 7- r,,,,,,, где Г ,,,,;„- минимально возможный период срабатывания ключа К;
iiKix- макснмально допустимый периодсрабатывання
к иоча /С. При этом должно Быполпяться:
mia tосп, где тосп-время переходпого процесса основного следящего привода при отработке максимального скачка напряжения (/i;
у7max 7 i, где TI
в- допустимая скоростная ошибка,
е- максимальпое рабочее ускорение. компенсирующее устройство
МОЖНО нрнмепять в системах, раоотающнх при малых значениях рабочих скоростей и ускорений.
П р е д м е т и з о б р е т е и и я
Компсиснруюндее устройство для следящего нривода, работающего в ограниченном диапазоне скоростей и ускорений, состоящее из тахогенератора, вспомогательной импульсной следящей системы, коммутирующего ключа, отличающееся тем, что, с целью повышения точиости слежения, вход вспомогательной имиульспой системы через коммутирующий ключ подключен одновременпо к принимающему тахогеператору следящего привода и выходному потенциометру вспомогательпой импульсной следящей системы, который подключен к цепи управления основного следящего привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1975 |
|
SU718832A1 |
| Следящая система | 1986 |
|
SU1401436A2 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ВОДИЛОМ ДИФФЕРЕНЦИАЛЬНОЙ МОТАЛКИ | 1965 |
|
SU175108A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| Следящая система | 1975 |
|
SU545969A1 |
| Следящая система | 1978 |
|
SU746405A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СКОРОСТЯМИ И УГЛАМИ НАВЕДЕНИЯ АРТУСТАНОВКИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203470C2 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
Г
