Известны механические руки, выполненные поворотными и постуиательно перемещаемыми при помощи рычажиой передачи.
Предлагаемая рука обеспечивает захват детали иа загрузочной и освобождение ее на рабочей позициях. Она снабжена подпружиненным рычагом, взводимым под действием неподвижного упора на подпружиненную защелку на загрузочной позиции и освобождаемым иод действием другого упора на рабочей позиции. Для контроля правильности иоложеиия детали на загрузочной н рабочей позициях рычаг привода иоступательиого перемещения вынолнен устанавливаемым но регулируемому жесткому упору и сиабжен контактом, взаимодействующим с контактом ва.та руки, положение которого определяется иоложением детали.
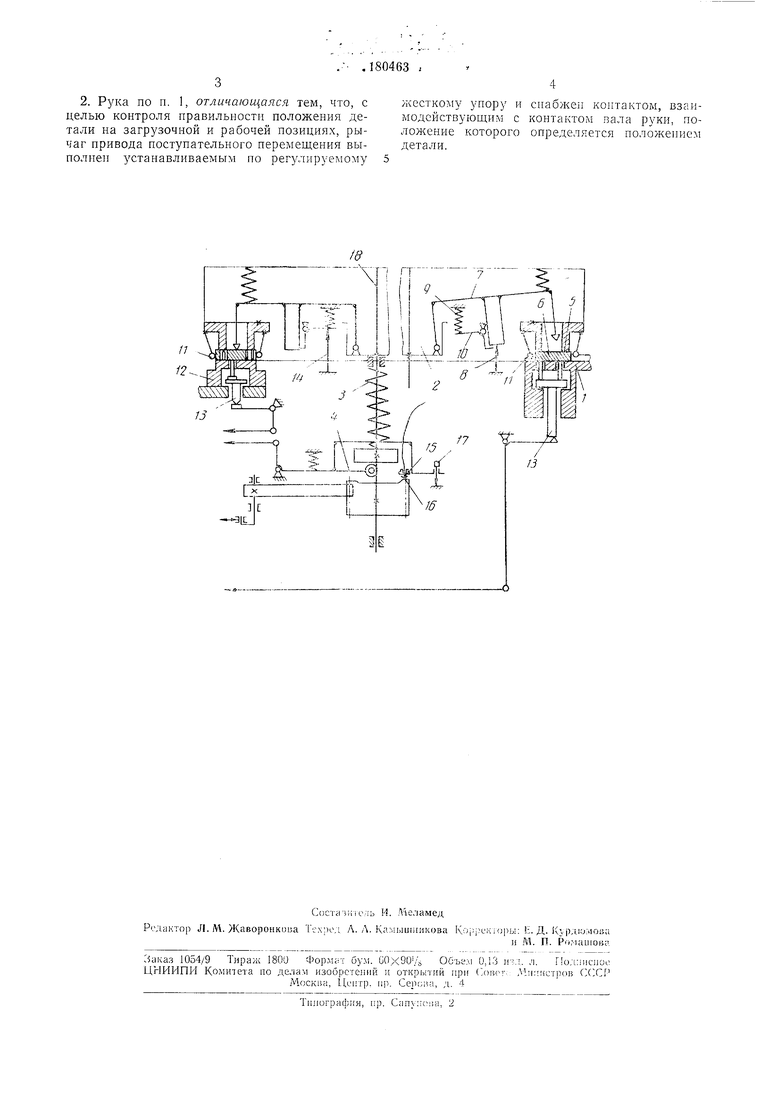
На чертеже изображена схема работы механнческой руки.
На загрузочной позиции 1 рука 2 иод действием пружины 3 при оиускаиии рычага 4 ириБода поступательного перемещения опускается до упора плоскостью 5 в плоскость заготовки (детали) 6, а подпружиненный ptsiчаг 7, взаимодействуя с неподвижным упором 8, поднимается и благодаря пружине 9 оказывается взведенным иа защелку 10. Захватив пружинными пальцами 11 заготовку.
рука поднимается, поворачивается и опускается иа рабочую позицию 12.
Надежность передачи заготовки в руку обеспечивается выталкивателем 13.
При опускании руки иа рабочую позицию защелка, взаимодействуя с упором 14, освобождает рычаг 7, который при иоследующем подъеме руки выталкивает из нее заготовку.
Правильность положения заготовки на загрузочной и рабочей позициях коитролируется замыканием электрических контактов 15 и 16, одни из которых закренлен на рычаге 4, устанавлнваемом в нижнем положеини по регулнруемолп жесткому упору 17, а другой - иа валу 18 руки и его иоложеиие определяется положением заготовкн.
П р е д 1 е т и 3 о б р е т е н и я
1. Механнческая рука, выполненная поворотной и ноступательно перемещаемой при помощи рычажной передачи, отличающаяся тем, что, с целью обеспечеиия захвата детали иа загрузочной 1 освобождения ее иа рабочей позициях, она снабжена иодпружииеиным рычагом, взводимым под действием иенодвижного упора на подпружиненную защелку на загрузочной позиции н освобождаемым под действием другого уиора на рабочей позиции.
2. Рука по п. 1, отличающаяся тем, что, с целью контроля правильности положения детали на загрузочной и рабочей позициях, рычаг привода поступательного перемещения выполнен устанавливаемым по регулируемому
жесткому упору и сиабжел контактом, взаимодействующим с контактом вала руки, ноложенне которого определяется положение детали.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для АВТОЛ1АТИЧЕСКОЙ ЗАГРУЗКИ И РАЗГРУЗКИ РАБОЧИХ МАШИН | 1971 |
|
SU303133A1 |
| Двухзахватная механическая рука | 1986 |
|
SU1313704A1 |
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1465252A1 |
| Атооператор | 1974 |
|
SU562411A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Загрузочное устройство | 1970 |
|
SU290659A1 |
| АГРЕГАТ ДЛЯ ЗАКАЛКИ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1972 |
|
SU330203A1 |
| Транспортная система автоматизированной технологической единицы | 1988 |
|
SU1558638A1 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Станок для электрохимического снятия заусенцев | 1985 |
|
SU1303307A1 |