Изобретение относится к области металлообработки и может быть использоваио для автоматической загрузки и разгрузки рабочих маши для раскатки колец. Известны устройства для автоматической загрузки и разгрузки рабочих машин, содержащие механическую руку с приводов командоаппарат н съемник обработанных деталей.
Недостатком известных устройств является то, что удаление обработанных деталей из механической руки и загрузка ее заготовками осуществляются последовательно, что снижтет производительность обслуживаемых рабочих маши и.
Цель изобретения - повышение производительности рабочих машин за счет совмещения во времени проиеесов загрузки механической руки и удаления обработанных деталей. Достигается это тем, что съемник обработанных деталей выполнен в виде клещевых захватиых органов с индивидуальньп приводом, связанным с приводом механической руки посредством комаидоаппарата.
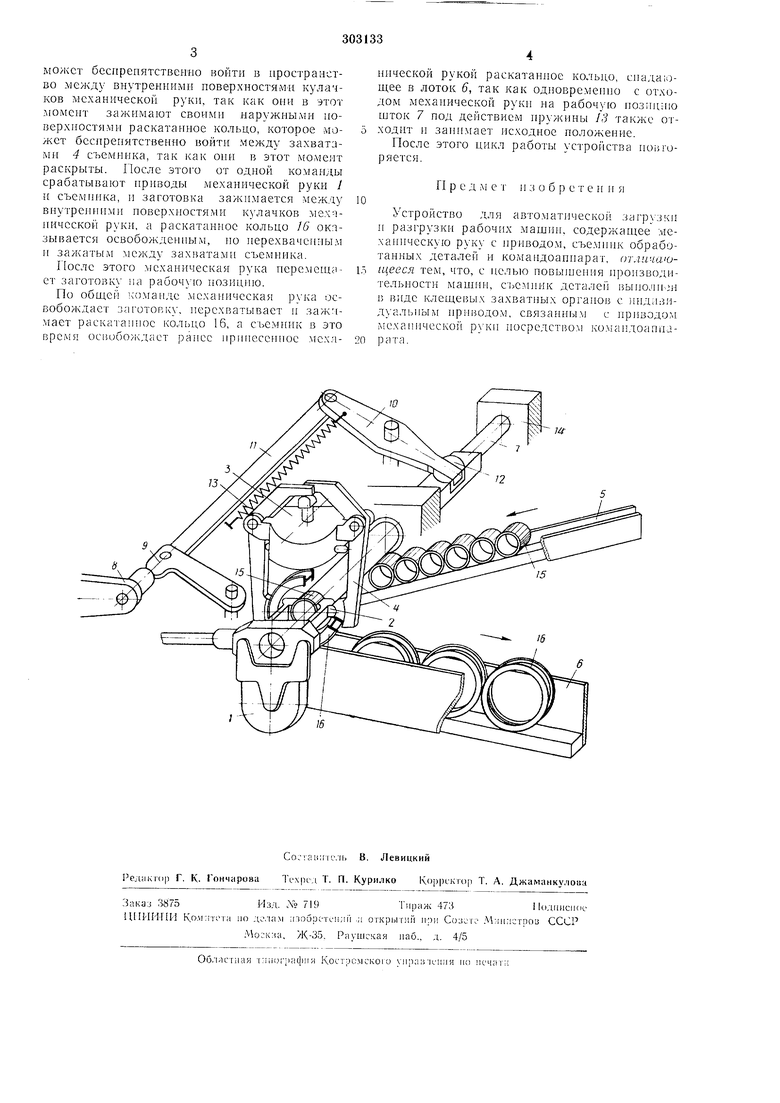
На чертеже схематично изображено устройство для автоматической загрузки и разгрузки рабочих машин.
Устройство содержит механическую руку /, снабженную двумя двусторонними кулачкями 2, съемник 3, выполненный в виде двух захватов 4, загрузочный 5 и разгрузочиый 6
лотки, шток 7 .механизма поштучно; выдачи заготовок и иривод штока, состоящий из рычагов 8, 9, 10, тяги 11, сухаря 12 и пружины
13.Шток смонтирован в двух направляющих
14.Лотки 5 и 6 устаиовлеиы наклонно. Съемник 3 смонтироваи так, что его захва гы
4 расположены над разгрузочным лoткo. 6 и совмещены с кулачками механической руки во вре.мя ее выстоя в данном положении.
Устройство работает следующим образом.
Заготовки 15 автоматически загружаются в лоток 5 и скатываются до упора (на чертеже не показан), задерживающего весь столб заготовок. Мехаиическая рука и рычаг 8, действуя от одного привода, перемещаются в горизоитальной плоскости к лоткам, при этом рычаг 8, размещенный впереди мехаиической руки, воздействует через рычаг 9, тягу 11, рычаг 10 и сухарь 12 на шток 7 и сообщает ему встречиое перемещение к мехаиической руке. Во время перемещения шток нанизывает на свой коней заготовку 15, отсекая ее от общего столба заготовок. Механическая рука песет с рабочей позиции раскатанное кольцо /6.
Таким образом, заготовка 15, перемещаем.ая из лотка 5, и раскатанное кольцо 16, перемещаемое с рабочей позиции, движутся навстречу друг другу и останавливаются над лотком 6 так, что заготовка размещается внутри раскатанного кольца. При этом оиа
МО/кет беспрепятствешю войти в пространство между внутренними поверхностям кулачков механической руки, так как они в этот .момент зажимают своими наружными поверхностями раскатапиое кольцо, которое может беспрепятственно войти между захватами 4 съемника, так как они в этот момент раскрыты. После этого от одной команды срабатывают приводы механической руки t и съемника, и заготовка зажимается между внутрепинми поверхностями кулачков мех-ь иической руки, а раскатанное кольцо 16 оказывается освобожденным, но перехваченным н зажатым между захватами съемника.
После этого механическая рука иере.мещает заготовку па рабочуто поз Пипо.
По обидей ко.манде .1еханнческая рука освобождает заготовку, перехватывает н зажн.мает раскатанное кольцо 16, а съемник в это время освобождает ранее нрпнесеппое механнческои рукой раскатанное кольцо, снадающее в лоток 6, так как од овременно с отходом механической рукн на рабочую познцию шток 7 под действием пружины 13 также отходит п заннмает исходное положение.
Поеле этого цикл работы устройства повторяется.
Пред .м е т п з о б р е т е н н я
Устройство для автоматическо загрузки н разгрузкп рабочИхХ машин, содержащее механнческую руку с приводом, съемннк обработанных деталей и командоаппарат, отличающееся тем, что, с целью повьпнет-т производительности машин, с1)емник деталей выполп- н в виде клеш,евых захватных органов с индивидуальным нриводом, связанным с нрпводом Л1еха1П1ческой руки носредст1Ю.м командоаииарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛЬЦЕПРОКАТНЫЙ СТАН | 1971 |
|
SU305949A1 |
| АВТООПЕРАТОР ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1970 |
|
SU276704A1 |
| Роботизированный технологический комплекс | 1987 |
|
SU1465264A1 |
| АВТООПЕРАТОР ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ДЕТАЛЕЙ12 | 1969 |
|
SU258003A1 |
| ПАТЕКТНО-ТЕХК-Г'Е'КАЯСЧВЛНО~Г!(А! | 1970 |
|
SU271240A1 |
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| ШТАМП-АВТОМАТ | 2000 |
|
RU2193941C2 |
| Загрузочное устройство | 1985 |
|
SU1298038A1 |
| Устройство для загрузки и разгрузки токарного многошпиндельного станка | 1986 |
|
SU1340976A1 |
| АВТООПЕРАТОР | 1972 |
|
SU424690A1 |
