Изобретение относится к машиностроению и может быть использовано при создании автоматизированных станочных комплексов, гибких производственных систем и т.п.
Целью изобретения является расширение эксплуатационных возможностей за счет увеличения количества обслуживаемых рабочих позиций.
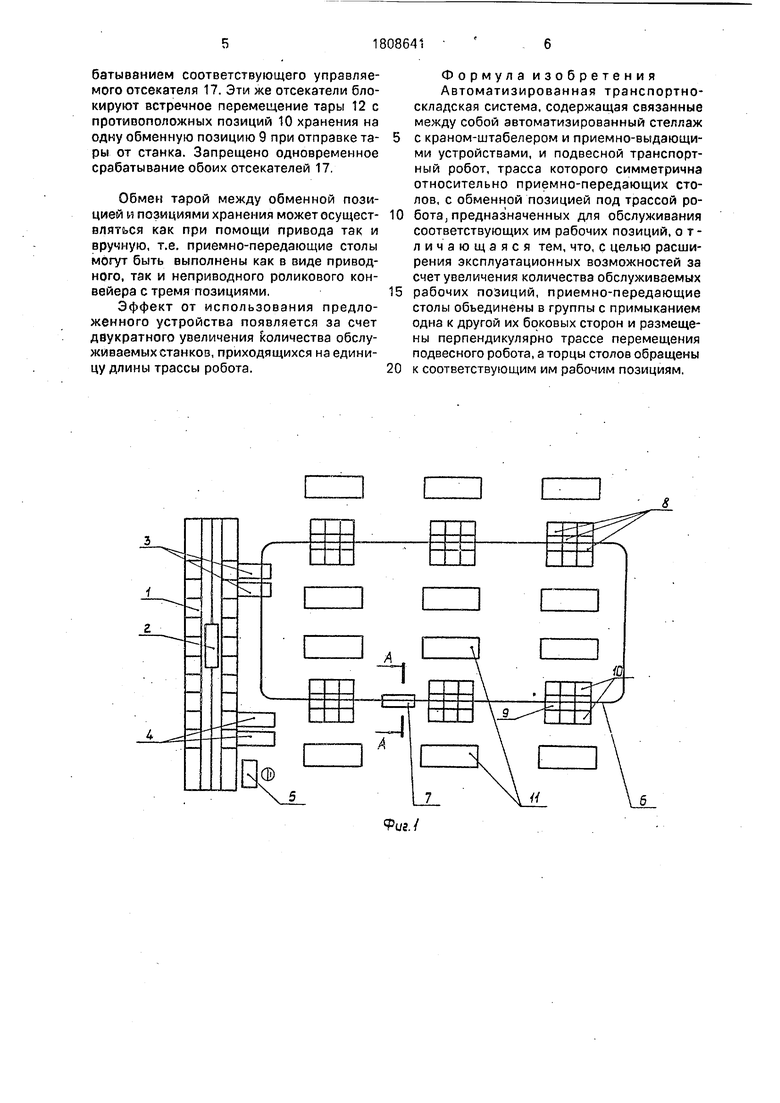
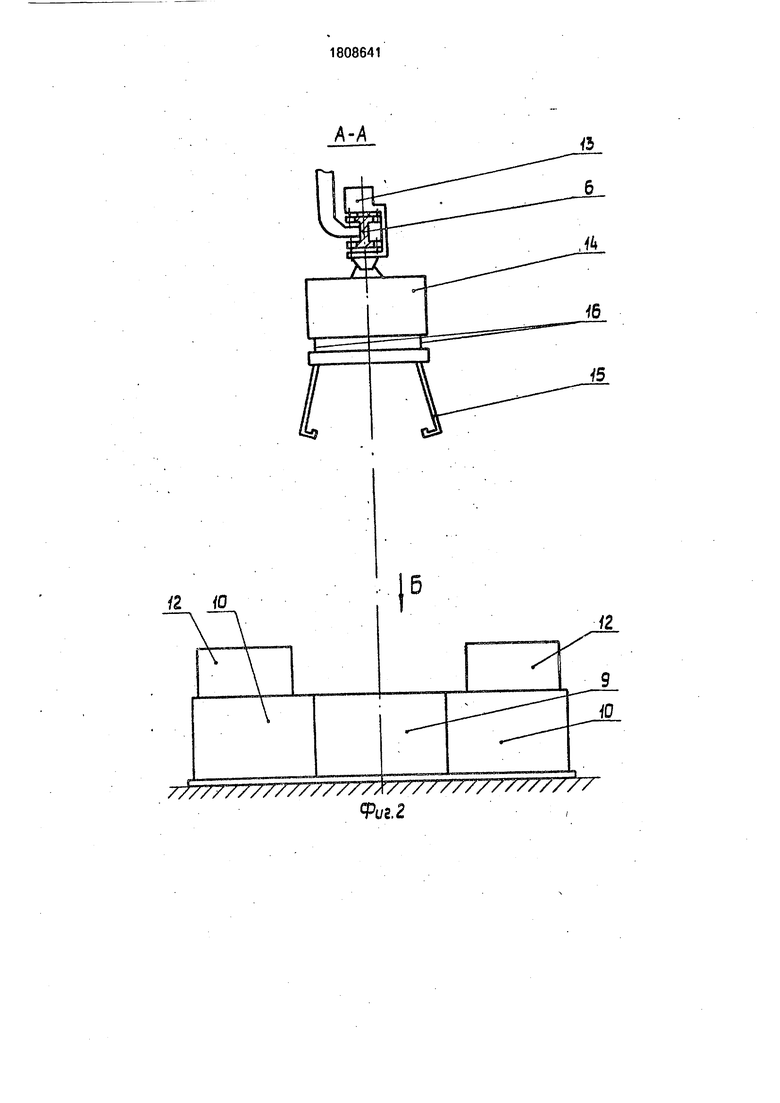
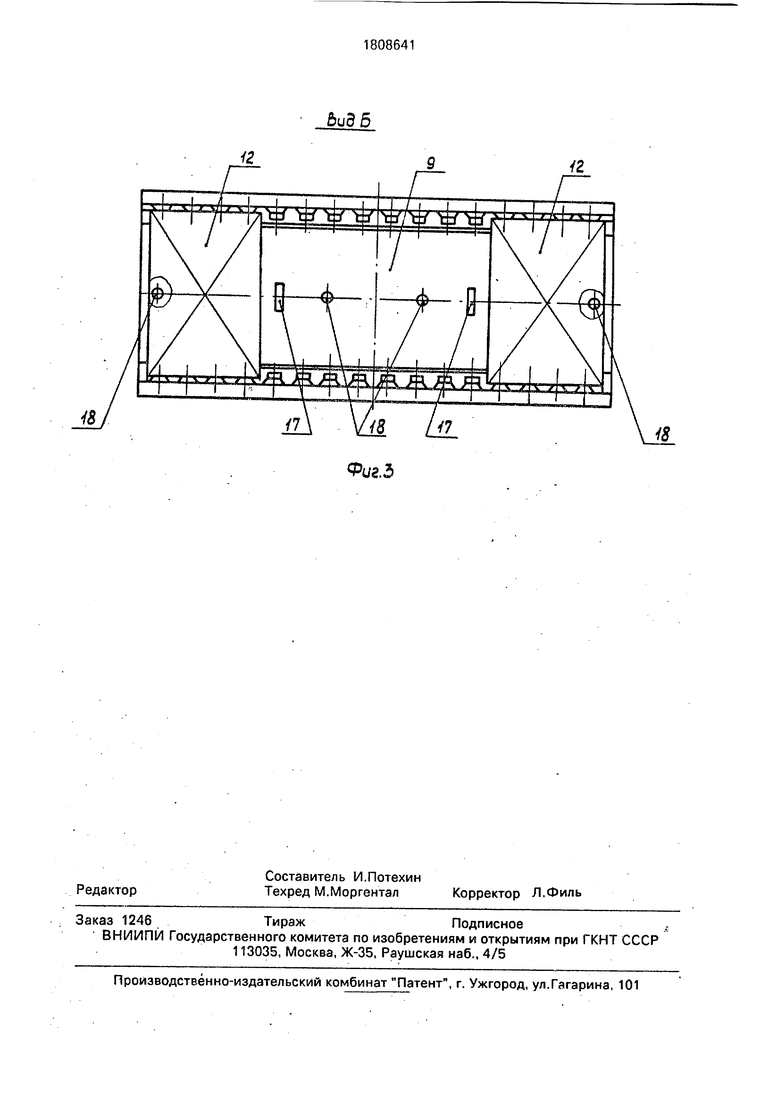
На фиг. 1 показана автоматизированная транспортно-складская система, вид в плане; на фиг,2 - разрез А-А на фиг.1. повернуто; на фиг.З - приемным стол, вид сверху.
Приняты следующие обозначения: 1 - стеллаж, 2 - кран-штабелер, 3 и 4 - прием- но-выдающие устройства, 5 - управляющая ЭВМ, 6 - трасса подвесного транспортнЬго робота, 7 - подвесной транспортный робот, 8 - приемно-передающие столы, 9 - обменная позиция приемно-передающего стола,
10 - позиция хранения приемно-передающего стола, 11 - рабочие позиции (обслуживаемое оборудование), 12 - тара с грузом,. 13 - каретка подвесного транспортного робота (ПТР). 14 - платформа ПТР. 15 - схваты ПТР, 16 - тросы ПТР, 17 - управляемые отсекатели, 18-датчики контроля наличия тары на позициях.
Кран-штабелер 2 размещается внутри двухрядного стеллажного склада 1. в ячейках которого размещается тара с грузами, и имеет доступ к обоим стеллажам. К стеллажу примыкает приемно-выдающее устройство 4, через которое осуществляется загрузка и разгрузка тары с грузами, и приемно-выдающее устройство 3 для передачи тары с грузом между стеллажом 1 и подвесным транспортным роботом 7. Робот подвешен к монорельсу трассы 6 и может перемещаться по нему при помощи каретки 13. На као
со
Јь
рётке 13 жестко закреплена платформа 14, к которой при помощи тросов 16 крепится грузозахват,
Трасса б робота 7 расположена над при- емно-передающими столами 8, установленными у обслуживаемых рабочих позиций (стан ков) 11.
Приемно-передэющие столы 8 выполнены в виде расположенных перпендикулярно трассе 6 робота групп из трех позиций, причем в центре, непосредственно под трассой 6 робота, расположена обменная позиция 9, предназначенная для взаимодействия с роботом 7 в процессе обмена с ним грузами (приема и передачи) а к ее боковым сторонам примыкают своими боковыми сторонами позиции 10 хранения, на которых размещается тара 12 с грузом (например, деталями) в процессе их обработки на с.танке (рабочей позиции) 11. Позиции обменная 9 и хранения 10 приемно-передающего стола 8 обеспечивают возможность перемещения груза между ними в прямом и обратном направлениях. Для предотвращения самопроизвольного не санкционированного перемещения грузов на приемно-передающих столах 8 установлены управляемые отсекатели 17. Для передачи информации в управляющую ЭВМ 5 о наличии грузов на позициях .приемного стола 8 установлены подключенные к ЭВМ 5 датчики 18 контроля наличия таръ на позициях.
Автоматизированная транспортно- складская система работает следующим образом.
Грузы (заготовки, комплекты инструмента, оснастка), предназначенные для размещения в стеллаже 1 транспортно-на- копительной системы (ТНС), загружаются через приемно-выдающее устройство 4 штабелером 2.
Для доставки тары с грузом на приемно- передающий стол 8 какого-либо станка 11 оператор вводит в управляющую ЭВМ 5 ко- мзиду поиска требуемой тары и подачи ее на приемно-передагощий стол 8 заданного станка 11. Штабелер 2 под управлением управляющей ЭВМ 5 осуществляет поиск заданной ячейки стеллажа 1, забирает тару и перемещает ее на приемно-выдающее устройство 3, которое перемещает тару в зону действия подвесного транспортного робота 7. Робот 7 под управлением управляющей ЭВМ 5 перемещается в зону приемно-выда- ющего устройства 3, захватывает тару и перемещает ее по трассе 6 таким образом, что тара оказывается над одной из свободных обменных позиций 9 приемно-передающего стола 8 соответствующего станка 11. Затем грузозахват 15 робота 7 опускается и устанавливает тару 12 на обменную позицию 9, при этом срабатывают датчики 18 контроля наличия тары, установленные на
обменной позиции 9. После этого в зависимости от расположения заданного станка (рабочей позиции) относительно обменной позиции 9 (см.фиг.З) - справа или слева, срабатывает соответственно правый или ле0 вый управляемый отсекатель 17, и тара 12 перемещается на соответствующую позицию 10 хранения, при этом срабатывает расположенный на этой позиции датчик 18 контроля наличия тары на позиции, сооб5 щая в управляющую ЭВМ о доставке груза к станку (рабочей позиции), а отсекатель 17 устанавливается в исходное положение, блокируя самопроизвольное перемещение
- тары 12с позиции 10 хранения на обменную
0 позицию 9.
По окончании работы с грузом (например, окончании обработки партии деталей) для отправки тары с позиции 10 хранения по команде оператора-станочника срабатыва5 ет соответствующий управляемый отсекатель 17, и тара 12 перемещается с позиции 10 хранения на обменную позицию 9, при этом освобождаются датчики 18 контроля наличия тары на позиции ,10 хранения и
0 срабатывает на обменной позиции 9,
сообщая в управляющую ЭВМ 5 о необходимости отправить тару с этого лриемно- передающего стола 8.
По команде оператора, вводимой.в уп5 равляющую ЭВМ 5, транспортный робот 7 перемещается по трассе б к этому приемно- передающему столу 8, опускаясь,захватывает тару 12, затем перемещается к приемно-выдзющему устройству 3 и опуска0 ет на него- тару. Возможно перемещение тары непосредственно между двумя рабочими позициями (станками), в этом случае транспортный робот перемещает тару 12 с обменной позиции 9 одного приемно-пере5 дающего стола 8 сразу на обменную позицию 9 другого приемно-передающего стола 8. Тара перемещается по приемно-выдаю- щему устройству 3 в зону взаимодействия со штабелером 2, который заби раетдоставлен0 цую тару с лриемно-выдающего устройства 3 и устанавливает ее в свободную ячейку стеллажа 1.
Таким образом, тара 12с грузом доставляется транспортным роботом 7 через одну
5 обменную позицию 9 к двум различным станкам 11, (установленным у противопо- позиций 10 хранения) через разные позиции 10 хранения. Направление перемещения тары 12 с обменной позиции 9 на одну из позиций 10 хранения задается сра батыванием соответствующего управляемого отсекателя 17. Эти же отсекатели блокируют встречное перемещение тары 12 с противоположных позиций 10 хранения на одну обменную позицию 9 при отправке та- ры от станка. Запрещено одновременное срабатывание обоих отсекателей 17.
Обмен тарой между обменной позицией и позициями хранения может осущест- впяться как при помощи привода так и вручную, т.е. приемно-передающие столы могут быть выполнены как в виде приводного, так и неприводного роликового конвейера с тремя позициями.
Эффект от использования предложенного устройства появляется за счет двукратного увеличения количества обслуживаемых станков, приходящихся на единицу длины трассы робота.
Формула изобретения Автоматизированная транспортно- складская система, содержащая связанные между собой автоматизированный стеллаж с краном-штабелером и приемно-выдающи- ми устройствами, и подвесной транспортный робот, трасса которого симметрична относительно приемно-передающих столов, с обменной позицией под трассой робота, предназначенных для обслуживания соответствующих им рабочих позиций, отличающаяся тем, что, с целью расширения эксплуатационных возможностей за счет увеличения количества обслуживаемых рабочих позиций, приемно-передающие столы объединены в группы с примыканием одна к другой их боковых сторон и размещены перпендикулярно трассе перемеа ения подвесного робота, а торцы столов обращены к соответствующим им рабочим позициям.
Фиг. Z
bud 5
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1992 |
|
RU2045384C1 |
| Автоматизированная транспортно-накопительная система | 1988 |
|
SU1648732A1 |
| Поточная линия для производства изделий верхнего трикотажа | 1978 |
|
SU958539A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Гибкая производственная система | 1987 |
|
SU1491663A1 |
| Автоматизированный участок гальванических покрытий деталей | 1987 |
|
SU1479557A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1409384A1 |
| Автоматизированный участок механической обработки деталей | 1983 |
|
SU1161314A1 |
| Автоматизированный комплекс для штамповки | 1987 |
|
SU1549649A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
Использование: автоматизированные станочные комплексы и гибкие производственные системы. Сущность изобретения: автоматизированная транспортно-склад- ская система содержит связанные между собой автоматизированный стеллаж с краном-штабелером и приемно-выдающи- ми.устройствами и подвесной робот, трасса которого симметрична относительно прием- но-передающих столов. Столы предназначены для обслуживания рабочих позиций и объединены в группы с примыканием друг к другу из боковых сторон. Столы размещены перпендикулярно трассе перемещения подвесного робота. Обменная позиция столов расположена под подвесной трассой робота, а торцы столов обращены к соответствующим рабочим позициям. 3 ил.
ФигЗ
| Транспортно-накопительная система | 1984 |
|
SU1199588A1 |
| кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Организационно-технологическое проектирование ГПС, В.О.Азбель и др | |||
| под общей ред | |||
| С.П.Митрофанова, Л.: Машиностроение, 1986, с.225-226 | |||
