Изобретение относится к погрузочно- разгрузочным устройствам, в частности к транспортным средствам с механическими Ограничителями движения и фиксации при возвратно-поступательном движении, и может быть использовано в поперечных транспортерах, двухрядных гальванических линиях, в незамкнутых двухрядных конвейерах при передаче груза с одного ряда на другой, а также в простых транспортерах, где требуется передавать груз с одной позиции на другую и обратно с фиксацией транспортера в конечных положениях.
Цель изобретения состоит в повышении точности останова подвижного корпуса в крайних положениях, а также упрощение конструкции.
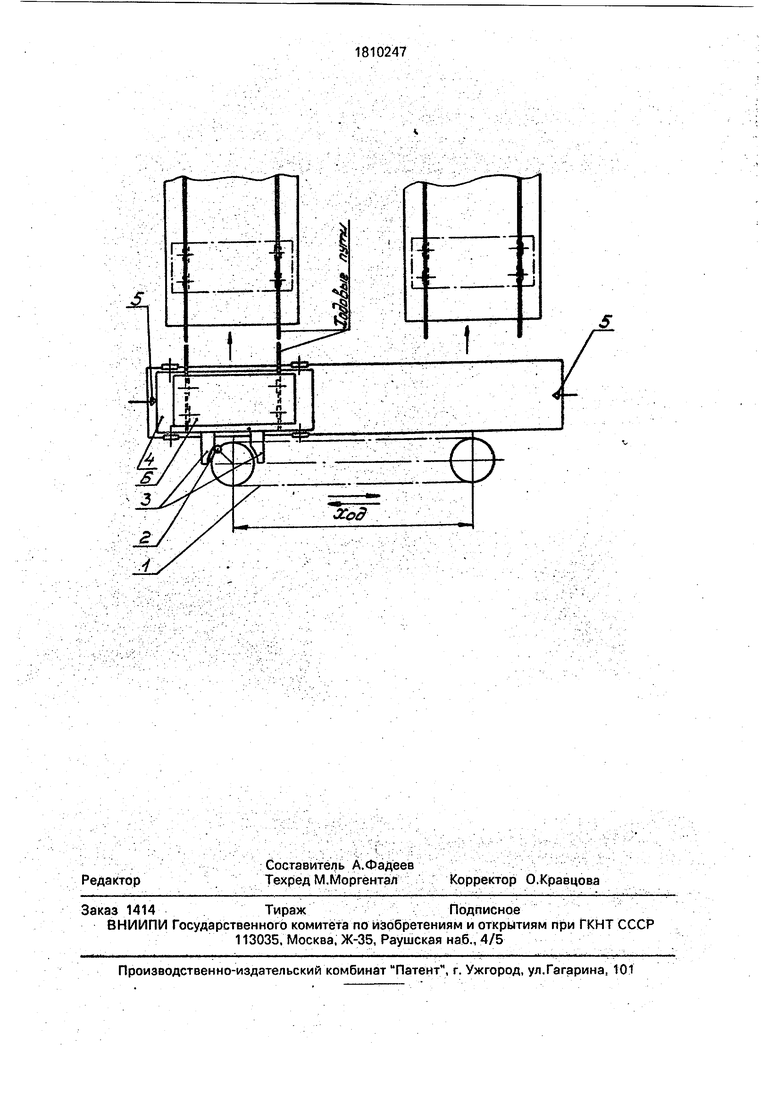
На чертеже показана схема механизма для перемещения грузов при возвратно-по- ,.ступательном движении.
Он содержит тяговый элемент 1, ведущий палец 2, упоры 3, подвижный корпус 4, конечные упоры 5.
Тяговый элемент 1 механизма выполнен в виде цепного транспортера с электромеханическим приводом. На цепи транспортера закреплен ведущий палец 2, который в рабочем положении (то есть при движении цепи в ту или обратную сторону) воздействует на прямой участок рабочей грани одного из упоров 3, которые оба образуют ведомую вилку, причем нижняя часть рабочей грани каждого из упоров ведомой вилки выполнена криволинейной по радиусу траектории движения ведущего пальца и образует холостой участок рабочей грани. Упоры 3 укреплены на боковой поверхности подвижного корпуса 4 и ведущий палец 2 в рабочем положении всегда расположен в ведомой вилке. Конечные жесткие механи00
о
ю
4
XI
ческио упоры 5 укреплены неподвижно в двух крайних положениях подвижного корпуса ; ... ;; л.- - ;- .
Механизм работает следующим образом. Укрепленный на движущейся цепи ведущий палец 2, находясь в вилке, воздействует на прямолинейную часть рабочей грани одного из упоров 3 и толкает подвижный корпус 4. При подходе подвижного корпуса в крайнее положение к конечному упору 5 ведущий палец с прямого участка рабочей грани упора 3 сходит на криволинейный (холостой) за счет поворота цепи и скользит по нему. Корпус 4 освобождается от воздействия ведущего пальца и останавливается, хотя палец может двигаться вместе с цепью до выключения электродвигателя. При остановке в крайнем положении подвижный корпус фиксируется от продольного перемещения е едкой стороны радиусной поверхностью рабочей грани одного из упоров ведомой вилки и ведущим пальцем, в с другой стороны - конечным упором S, при этом инерционные силы всей тормозной системы не воздействуют на положение подвижного корпусе 4, что повышает точность останова.
После требуемого регламентируемого еыстоя подвижного корпуса привод устройства включается в обратном направлении и ведущий палец 2, выходя из радиусного участка движения одного упора, доходит до второго упора ведомой вилки и, нажимая на его прямолинейную часть рабочей грани,; толкает подвижный корпус в другую сторону
до крайнего положения и упора 5. Далее;
цикл повторяется в течение всего времени;
работы. -. ,, -. Л--.-;--,:/- л : :.;
Таким образом, по сравнению с прото-j
типом предлагаемое устройство имеет повышенную точность останова, достигаемое1 простыми средствами. Исключается сложная кинематическая схема. Надежность устройства повышается практически на 100% и зависит только от механического износа
деталей. В предлагаемой конструкции сокращается количество деталей сложной конфигурации, что позволяет снизить себестоимость изготовления. . Формупа изобретен ия
Механизм для перемещения грузов, содержащий тяговый орган с толкателем для взаимодействия с упорами рабочего органа, каждый из которых имеет прямолинейный участок рабочей поверхности, от л и ч а ющ и и с я тем, что, с целью повышения точности останова, упоры установлены на; боковой поверхности рабочего органа с об-; разеванием вилки и имеют криволинейные участки рабочих поверхностей, выполнен- .
ные по радиусу траектории движения толкателя...
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для кладки кирпича | 1974 |
|
SU962551A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ НАКОПЛЕНИЯ ТРАНСПОРТИРОВКИ ЗАКРЕПЛЕННОГО НА ТРОЛЛЕЯХ ШТУЧНОГО ГРУЗА | 1969 |
|
SU241990A1 |
| Конвейер-кантователь | 1982 |
|
SU1062146A1 |
| ШВЕЙНАЯ МАШИНА | 1993 |
|
RU2064545C1 |
| Устройство для наполнения колбасных оболочек фаршем | 1980 |
|
SU938886A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ДРОТОМ ПАТРОНОВ СТЕКЛОФОРМУЮЩЕЙ МАШИНЫ | 1970 |
|
SU269440A1 |
| Токоограничивающее устройство | 1977 |
|
SU662996A1 |
| Устройство для синхронной заливки форм на литейных конвейерах | 1982 |
|
SU1071362A1 |
| Подвесной конвейер | 1980 |
|
SU933564A1 |
| ВАЛКОВАЯ ЖАТКА | 2002 |
|
RU2242858C2 |
| Устройство для перемещения грузовых тележек | 1976 |
|
SU595225A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
