Изобретение относится к транспорному машиностроению, в честности к устройствам для транспортирования литейных опок и полуформ.
Известно устройство, включающее конвейер, механизм поворота и груэоносители 1 J.
Недостатками его являются сложность и невозможность осуществить поворот груза на 360°.
Наиболее близким техническим решением к изобретению является конвейер-кантователь , включающий трассу с криволинейными и прямолинейными участками основного тягового орг гана, грузоносители и поворотный механизм с трассой дополнительного тягового органа С2 D.
Недостатки известного устройства заключаются в том, что поворот груза осуществляется лиыь на 90° и в сложности конструкции механизма поворота.
Целью изобретения является расширение технологических возможностей и упрощение конструкции.
Указанная цель достигаемся тем, что в конвейере - кантователе, включающем трассу с криволинейными и прямолинейными участками основного тягового органа, .грузоносители и поворотный механизм с трассой дополнительного тягового органа, поворотный механизм выполнен в виде рычагов, каждый из которых одним.концом соединен с соответствующим грузоносителем и основным тяговым органом, а другим - с дополнительным тяговым органом, при этом на прямолинейных участках трассы дополнительного и основного тяговых органов размещены со смещением одна относительно другой в горизонтальной, а на криволинейных участках - в вертикальной плоскостях.
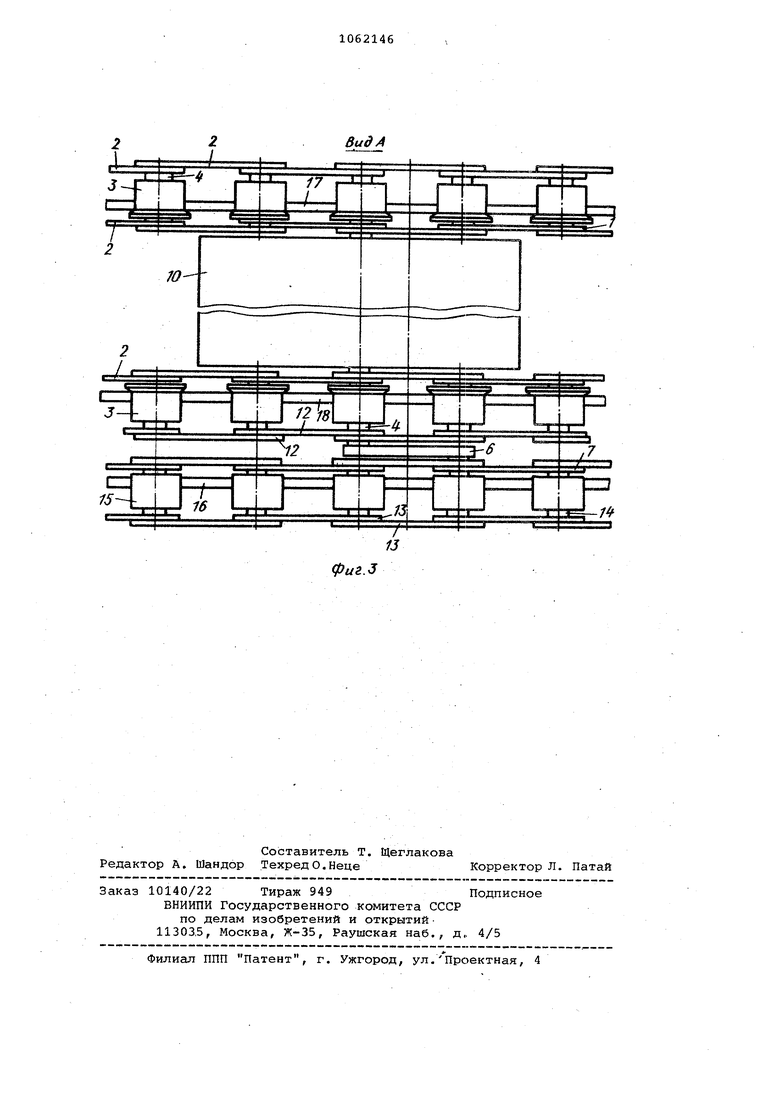
На фиг. 1 показана кинематическая схема конвейера-кантователя, разрез вертикальной плоскостью; на фиг. 2 - узел Гна фиг. 1 (без разреза) ; на фиг. 3 - вид А на фиг. 1.
Конвейер-кантователь включает основной тяговый орган 1, состоящий из двух параллельно движущихся цепей 2 с катками 3 на осях 4. На осях 4 закреплены грузоносители 5, кантование которых осуществляется поворотным механизмом, выполненным в виде рычагов 6, один конец каждого из которых соединен с соответствующим грузоносителем 5 и с основным тяговым органом 1, а другой конец соединен с дополнительным тяговым органом 7.
Трасса основного тягового 1 имеет криволинейные 8 и прямолинейные 9 участки, причем трасса дополнительного тягового органа 7 на прямолинейных участках 9 отстоит от
трассы основного тягового органа 1 в горизонтальной плоскости, а на криволинб йных участках 8 в вертикальной плоскости. Грузы,10 жестко закреплены на осях 4 спомощью кронштейнов 11. Цепи 2 состоят из пластин 12, осей 4 и катков 3. Рычаги 6 в виде кривошипов жестко соединены с концами осей 4. Дополнительный тяговый орган 7 состоит из пластинчатых
0 звеньев 13, пальцев 14 и колес 15, опирающихся на направляющую 16. Опорные направляющие 17 и 18 служат для катков 3.
Конвейер-кантователь работает сле5 дующим образом.
Груз 10, например опока, перемещается пусть сначала по верхнему прямолинейному участку 9 опорных направлягацих 17 и 18 со скоростью
Q V. Колеса 15, перемещаясь в направляющих 16, удерживают рычаг 6, а вместе с ним и груз 10 в горизонтальном положении. С входом груза 10 на радиусный переход с криволинейного участка 8 ось 4 перемещается
по пути, пройденному ужеjпальцем 14 рычага 6, так как радиусы их направляющих в этом переходе равны и .исходят из одного центра вращения. В результате рычаг 6 отклоняется от горизонтального положения на угол d против часовой стрелки.
После завершения движения по радиусному переходу о6 ось 4 и палец 14 одновременно с помощью кат5 ков 3 и колес 15 входят в радиусные переходы параллельного смещения у:, . Одновременность их входа обеспечивает параллельное смещение рычагу 6. После завершения движения
0 по радиусному переходу параллельного смещения у ось 4 входит в радиусный переход C3i.2 криволинейного участка 8, а палец 14 теперь уже в свою очередь перемещается по его
5 пути. Осуществляется поворот груза 10 на 180°, при этом поворот происходит при неизменных постоянных линейных скоростях V основного 1 и дополнительного 7 тяговых органов и
Q длины путей, пройденные пальцем 14 и осью 4, естественно одинаковы, хотя шедшая вначале пути первой ось 4 к концу переворота груза 10 отстает от пальца 14. Сравнять длины пройденных путей помогает радиусный
переход параллельного смеиения рычага б, так как оси вращения радиусов, образующих этот .переход I соответственно для пальца и оси 4 R, смещены на расстояние а , рав0 нее длине I рычага 6.
На фиг. 1 oi. оСл
У-, 180.
90
Из тригонометрии направление, противоположное движению часовой стрелки, принято считать положительным. 5 Тригонометрическая сумма углов ,+
Ф 062 180°, значит на 180° перевернутым оказался и груз 10. .Однако, если в таком перевернутом положении перемещать далее груз 10 параллельно самому себе и привести его в таком положении на исходную позицию, конвейер окажется нера 6отоспособным, так как груз 10 не занимает свое ис ходное нормальное положение. Палец 14 Д}асполагается не впереди, а сзади оси 4, т, е. ими пройдены раз ны пути Чтобы сделать конвейер работоспособным, необходимо груз 10 перевернуть еще раз, а в какую сторону значения не имеет. В результате (фиг. 1) три гонометричёские суммы углов радиусны переходов поворота рычага б равны
360
Ы. + d.- otj:
а радиусных переходов паргшлельного смещения
рБггага 6 -:у -f у2 аз V °
Таким образом, введение в направляющие устройства радиусных переходов поворота рычагов с требованием, что каждая тригонометрическая сумма углов радиусных переходов соответственно поворота и параллельного «же-щения рычагов должна быть кратна 360, обеспечивает поворот груза на любой зёщаннЕлй угол, транспортирование груза в любом заданном направлении, причем все движения осуществляются непрерывно.
Применение предлагаемого конвейера-кантователя позволит расширить технологические возможности и упрос тить конструкцию кантователя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1985 |
|
SU1261858A1 |
| Горизонтально-замкнутый конвейер | 1977 |
|
SU685576A1 |
| Каретка подвесного конвейера | 1984 |
|
SU1217733A1 |
| Конвейер-контователь | 1985 |
|
SU1298156A1 |
| Подвесной пространственный конвейер | 1973 |
|
SU472872A1 |
| Многоярусный подвесной конвейер | 1972 |
|
SU444707A1 |
| Пространственный конвейер | 1982 |
|
SU1058837A1 |
| Грузонесущий орган пластинчатого конвейера | 1983 |
|
SU1102725A1 |
| Конвейер с пространственной трассой | 1982 |
|
SU1094812A1 |
| Горизонтально-замкнутый конвейер | 1990 |
|
SU1757970A1 |
КОНВЕЙЕР-КАНТОВАТЕЛЬ, включающий трассу с криволинейными и прямолинейными участками основного тягового органа , грузоносители и S поворотный механизм с трассой дополч нительного тягового органа, отличающийся тем, что, с целью расширения технологических возможностей, и упрощения конструкции, поворотный механизм выполнен в виде рычагов, казкдый из которых одним концом соединен с соответствуюрдам грузоносителем и основным тяговым органом, а другим - с дополнительным тяговым органом при этом на прямолинейных участках трассы дополнительного и основного тяговых органов размещены со смещением одна относительно другой в горизонтальной, а на криволинейных участках - в вертикальной плоскостях. (Л с i, 7 а ю 4;: О) фиг.1
фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для обработки изделий погружением | 1979 |
|
SU770954A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Поворотный конвейер для плоских изделий | 1972 |
|
SU645543A3 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
