Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано для надежной подачи электрической энергии, тока, охлаждающей и рабочей сред или т. п. к промышленному роботу.
Цель изобретения - повышение износостойкости и снижение габаритов.
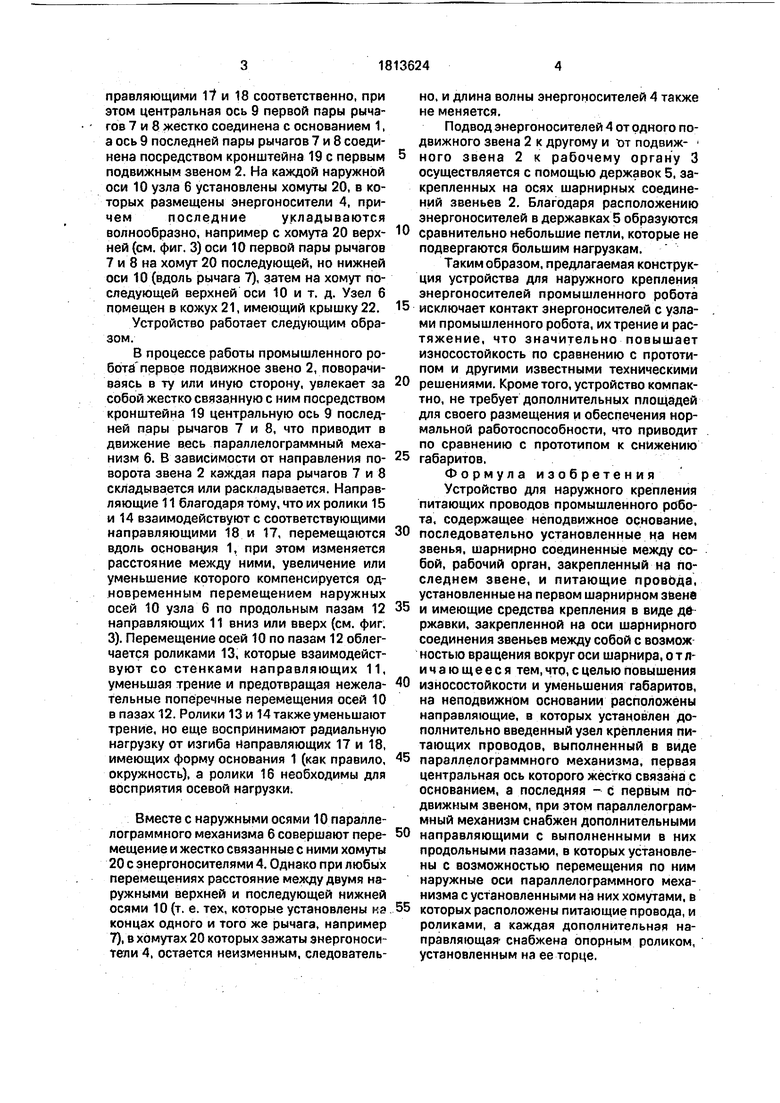
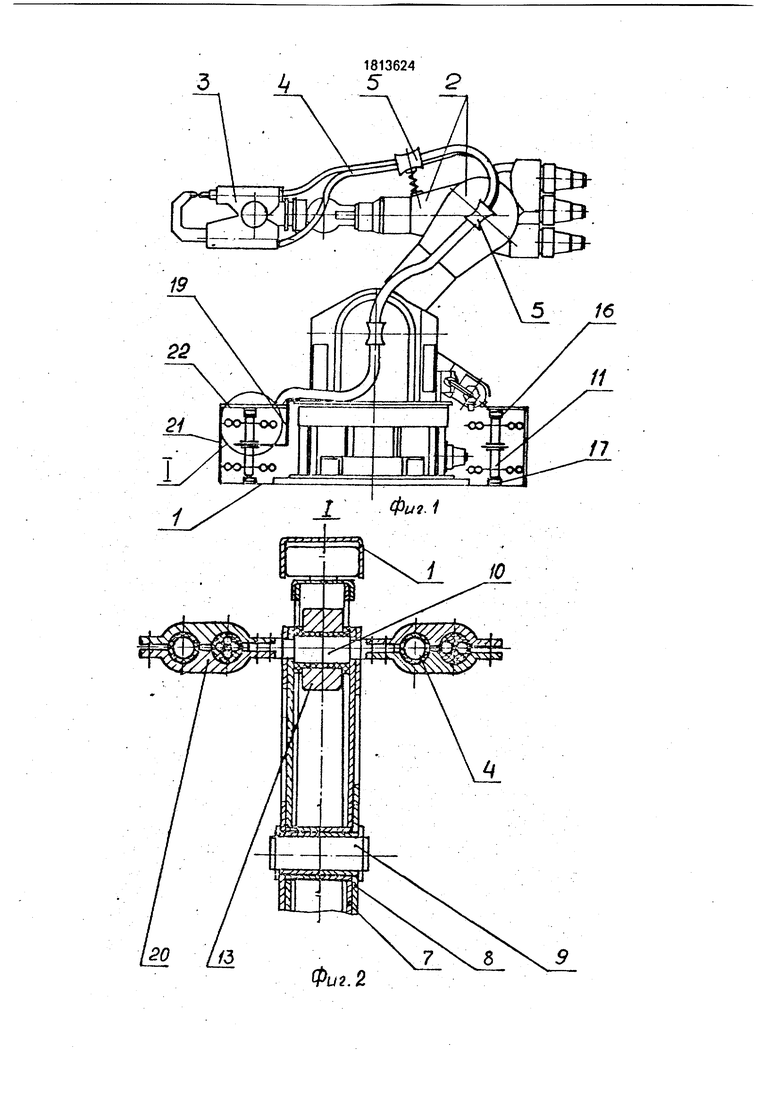
На фиг. 1 схематично представлен общий вид устройства; на фиг. 2 -узел I на фиг. 1; на фиг. 3 - звено параллелограммного механизма.
Устройство для наружного крепления энергоносителей промышленного робота содержит основание 1, установленные на нем последовательно подвижные звенья 2, которые шарнирно соединены между собой, рабочий орган 3, закрепленный на последнем звене 2, пучок энергоносителей 4, имеющий средства крепления в виде державки 5, закрепленной на оси шарнирного соединения звеньев 2 между собой с возможностью вращения вокруг оси шарнира, и узел 6 крепления пучка энергоносителей 4 к первому подвижному звену 2. Узел 6 выполнен в виде параллелограммного механизма, состоящего из ряда пар рычагов 7 и 8, шарнирно соединенных между собой центральными 9 и наружными 10 осями. Наружные оси 10 узла 6 попарно соединены дополнительными направляющими 11, имеющими продольные пазы 12, при этом оси 10 установлены в пазах 12 с возможностью перемещения по ним и снабжены роликами 13, взаимодействующими с направляющими 11. Направляющие 11 имеют ролики 14 и 15 и дополнительные опорные ролики 16, установленные на их торцах. На основании 1 выполнены направляющие: верхняя 17 и нижняя 18, а параллелограммный механизм 6 установлен на основании 1 так, что его ролики 14 и 15, 16 взаимодействуют с на00
00
о ю
правляющими 1t и 18 соответственно, при этом центральная ось 9 первой пары рычагов 7 и 8 жестко соединена с основанием 1, а ось 9 последней пары рычагов 7 и 8 соединена посредством кронштейна 19 с первым подвижным звеном 2. На каждой наружной оси 10 узла 6 установлены хомуты 20, в которых размещены энергоносители 4, причем последние укладываются волнообразно, например с хомута 20 верхней (см, фиг. 3) оси 10 первой пары рычагов 7 и 8 на хомут 20 последующей, но нижней оси 10 (вдоль рычага 7), затем на хомут последующей верхней оси 10 и т. д. Узел б помещен в кожух 21, имеющий крышку 22.
Устройство работает следующим образом.
В процессе работы промышленного робота первое подвижное звено 2, поворачиваясь в ту или иную сторону, увлекает за собой жестко связанную с ним посредством кронштейна 19 центральную ось 9 последней пары рычагов 7 и 8, что приводит в движение весь параллелограммный механизм 6. В зависимости от направления поворота звена 2 каждая пара рычагов 7 и 8 складывается или раскладывается. Направляющие 11 благодаря тому, что их ролики 15 и 14 взаимодействуют с соответствующими направляющими 18 и 17, перемещаются вдоль основания 1, при этом изменяется расстояние между ними, увеличение или уменьшение которого компенсируется одновременным перемещением наружных осей 10 узла б по продольным пазам 12 направляющих 11 вниз или вверх (см. фиг. 3). Перемещение осей 10 по пазам 12 облегчается роликами 13, которые взаимодействуют со стенками направляющих 11, уменьшая трение и предотвращая нежелательные поперечные перемещения осей 10 в пазах 12. Ролики 13 и 14 также уменьшают трение, но еще воспринимают радиальную нагрузку от изгиба Направляющих 17 и 18, имеющих форму основания 1 (как правило, окружность), а ролики 16 необходимы для восприятия осевой нагрузки.
Вместе с наружными осями 10 параллелограммного механизма 6 совершают перемещение и жестко связанные с ними хомуты 20 с энергоносителями 4. Однако при любых перемещениях расстояние между двумя наружными верхней и последующей нижней осями 10 (т. е. тех, которые установлены ка концах одного и того же рычага, например 7), в хомутах 20 которых зажаты энергоносители 4, остается неизменным, следовательно, и длина волны энергоносителей 4 также не меняется.
Подвод энергоносителей 4 от одного подвижного звена 2 к другому и ът подвиж- ного звена 2 к рабочему органу 3 осуществляется с помощью державок 5, закрепленных на осях шарнирных соединений звеньев 2. Благодаря расположению энергоносителей в державках 5 образуются
сравнительно небольшие петли, которые не подвергаются большим нагрузкам.
Таким образом, предлагаемая конструкция устройства для наружного крепления энергоносителей промышленного робота
исключает контакт энергоносителей с узлами промышленного робота, их трение и растяжение, что значительно повышает износостойкость по сравнению с прототипом и другими известными техническими
решениями. Кроме того, устройство компактно, не требует дополнительных площадей для своего размещения и обеспечения нормальной работоспособности, что приводит по сравнению с прототипом к снижению
габаритов.
Формула изобретения Устройство для наружного крепления питающих проводов промышленного робота, содержащее неподвижное основание,
последовательно установленные на нем звенья, шарнирно соединенные между собой, рабочий орган, закрепленный на последнем звене, и питающие провода, установленные на первом шарнирном звене
и имеющие средства крепления в виде державки, закрепленной на оси шарнирного соединения звеньев между собой с возмож ностыо вращения вокруг оси шарнира, отличающееся тем, что, с целью повышения
износостойкости и уменьшения габаритов, на неподвижном основании расположёны направляющие, в которых установлен дополнительно введенный узел крепления питающих проводов, выполненный в виде
параллелограммного механизма, первая центральная ось которого жестко связана с основанием, а последняя - с первым подвижным звеном, при этом параллелограммный механизм снабжен дополнительными
направляющими с выполненными в них продольными пазами, в которых установлены с возможностью перемещения по ним наружные оси параллелограммного механизма с установленными на них хомутами, в
которых расположены питающие провода, и роликами, а каждая дополнительная направляющая1 снабжена опорным роликом, установленным на ее торце.
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УГЛОВЫХ И ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1994 |
|
RU2102714C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2006 |
|
RU2331066C1 |
| Промышленный робот | 1977 |
|
SU846267A1 |
| Устройство линейного перемещения | 1984 |
|
SU1268363A1 |
| Робот-погрузчик сеток с овощами | 2019 |
|
RU2722747C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ ДЛЯ ПЕРЕМЕЩЕНИЯ ОБРАБАТЫВАЕМЫХ ЗАГОТОВОК С ОДНОГО ПРЕССА НА ДРУГОЙ НА ЛИНИИ ПРЕССОВАНИЯ | 1994 |
|
RU2091207C1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ИЗДЕЛИЙ С КОНВЕЙЕРА И ИХ УКЛАДКИ В ТАРУ | 2014 |
|
RU2549319C1 |
| БЛОК УДЕРЖАНИЯ СОСТАВА НА СТАНЦИОННОМ ПУТИ | 2017 |
|
RU2658746C1 |
| БАЛАНСИРНЫЙ ПНЕВМАТИЧЕСКИЙ МАНИПУЛЯТОР | 2013 |
|
RU2625356C2 |
Использование: в машиностроении, в устройствах для наружного крепления питающих проводов манипуляторов. Сущность изобретения: на основании расположен дополнительный узел крепления питающих проводов, выполненный в виде параллелог- раммного механизма, снабженного направ- ляющими с выполненными в них продольными пазами. В пазах с возможностью перемещения по ним установлены наружные оси с установленными на них хомутами, в которых расположены питающие провода. Ось соединена с первым подвижным звеном манипулятора, поворот которого приводит в движение весь парал- лелограммный механизм. 3 ил.
| Устройство для наружного крепления и направления питающих проводов перемещающихся инструментов манипуляторов | 1985 |
|
SU1309907A3 |
