Изобретение относится к области производства нанесения гальванических покрытий и может быть использовано в различных отраслях народного хозяйства,
Целью изобретения является повышение надежности линии путем размещения манипулятора вне зоны с повышенным содержанием агрессивных паров.
Поставленная цель достигается теМ, что консольный манипулятор содержит раму, на которой установлена каретка вертикального хода, снабженная консолью с грузозахватным органом, причем консоль выполнена в виде двух параллельных рычагов одинаковой длины с приводом поворота, одни концы рычагов шарнирно соединены с грузозахватным органом, а другие - с кареткой вертикального хода. При этом ванны установлены на разных уровнях, а длина рычагов соответствует неравенству
Чгде I - длина рычагов:
L - величина изменения вылета консоли.
В отличие от прототипа, в такой конструкции все механизмы консольного манипулятора, обслуживающего два параллельных ряда ванн, вынесены из зоны с повышенным содержанием агрессивных паров. Передача подвесок между рядами ванн осуществляется поворотом двух параллельных рычагов в месте их шарнирного крепления к каретке вертикального хода.
Так как при повороте рычагов изменение вылета консоли зависит от их длины I и угла поворота а (см. чертеж), то для уменьшения габаритов манипулятора (и, соответственно, линии) по ширине, необходимо увеличивать длину рычагов. Причем минимальная длина рычагов должна быть не менее половины изменения вылета консоли. Угол поворота а рычагов в этом случае составит 180°. При этом рычаги должны располагаться в конечных положениях горизонтально, что увеличит габариты
0
ю
О
ч
анипулятора по ширине. В случае же выполнения неравенства можно констуктивно выбрать такую длину рычагов I, при которой конечные положения рычагов можно расположить несимметрично отноительно вертикального положения, сместив их в сторону ванн. Это позволяет меньшить габаритную ширину манипуляора и упростить привод поворота рычагов, так как при этом уменьшается угол а их поворота. В связи с несимметричным положением рычагов в конечных положениях консоль при изменении вылета будет располагаться на разной высоте. Причем на минимальном вылете консоль будет располагаться выше, чем на максимальном. Поэтому ряд ванн в двухрядной линии, расположенный со стороны манипулятора, необходимо поднять выше уровня параллельного ряда ванн на величину, равную разности этих высот, чтобы не увеличивать вертикального хода каретки, т.к. это увеличение усложнит конструкцию манипулятора и системы управления линией. Кроме того, размещение рядов ванн на разных уровнях позволяет расположить вытяжной воздуховод под ваннами, расположенными ближе к манипулятору.
Известны конструкции грузоподъемных башенных кранов с маневровой стрелой. Такие краны содержат поворотную и неповоротную части. Поворотная часть включает поворотную раму с механизмами и противовесом, башню и шарнирно соединенную с ней стрелу, которая с помощью канатной полиспастной системы может изменять угол наклона к горизонтальной плоскости и перемещать подвешенный на концевой части стрелы груз в радиальном направлении, изменяя вылет крана,
В отличие от подобных конструкций кранов, в предлагаемом техническом решении роль маневровой стрелы выполняют два параллельных рычага одинаковой длины, при повороте которых изменяется вылет консоли, на которой жестко закреплен грузозахватный орган для подвесок. Поэтому в процессе переноса подвесок из одного ряда ванн в другой они совершают плоско-параллельное перемещение оез поворота. Кроме того, в линии применено расположение параллельных рядов ванн на разных уровнях для компенсации изменения высоты расположения подвесок при одинаковом вертикальном ходе каретки подъема. В известной же конструкции крана груз подвешен на концевой части стрелы на гибком тяговом органе и изменение его положения по высоте, с поворотом стрелы, компенсируется увеличением или уменьшением вертикального хода грузонесущей подвески.
Предлагаемая конструкция линии появляется чертежом, на котором представлена
схема поперечного разреза двухрядной линии.
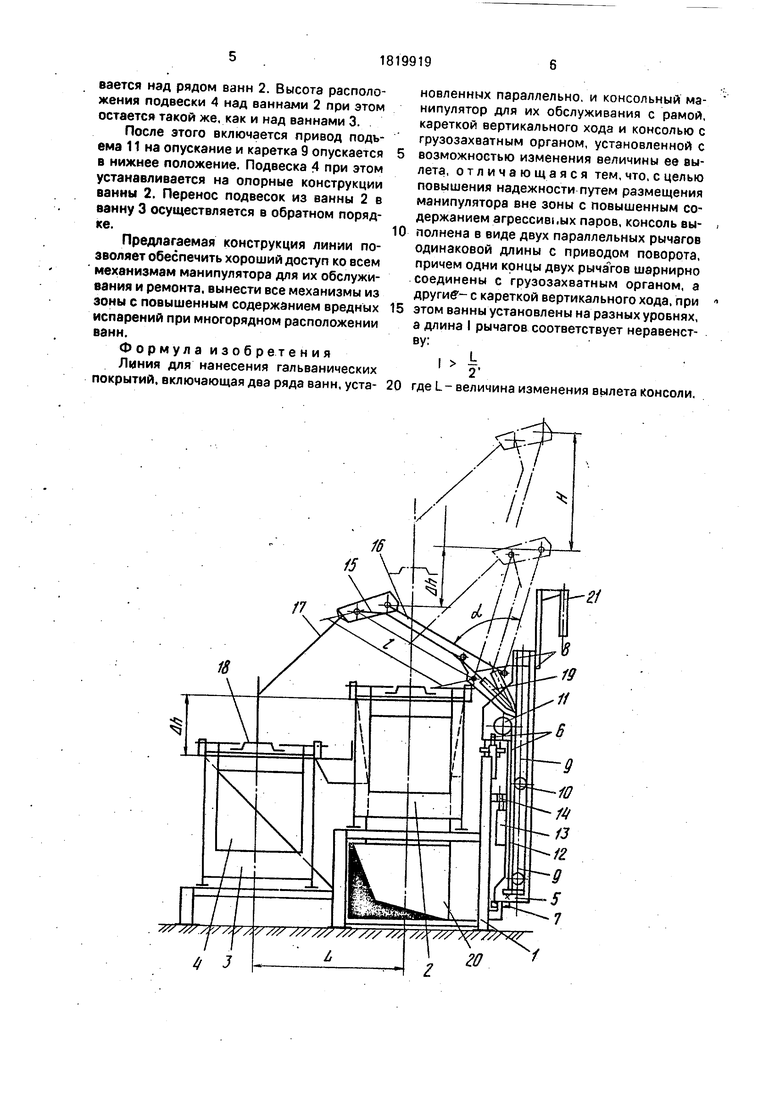
Линия включает раму 1, на которой установлены с разностью по высоте Ah правый и левый параллельные ряда ванн 2 и 3,
в которых расположены подвески 4 с обрабатываемыми деталями.
С правой стороны линии расположен консольный манипулятор, включающий раму 5, которая с помощью опорных и
направляющих роликов 6 и 7 установлена на направляющих конструкциях рамы 1. В вертикальных направляющих 8 рамы 1 расположена каретка 9 вертикального хода Н, которая опирается- на направляющие 8 с
помощью роликов 10, с приводом 11 вертикального хода каретка 9 соединена с помощью гибкого тягового органа 12. Привод горизонтального перемещения 13, установленный на раме 5, связан с зубчатой рейкой
14. В верхней части каретки 9 шарнирно закреплены два параллельных рычага 15 и 16, которые с другой стороны шарнирно соединены с консолью 17, на которой закреплен захватный орган 18 для подвесок 4.
Рычаг 15 шарнирно соединен с цилиндром 19 привода поворота рычагов 15 и 16. Цилиндр 19 в свою очередь шарнирно крепится к каретке9. Под рядом ванн 2 расположен вытяжной воздуховод 20. А подвод энергоносителей и линий управления осуществляется с помошью шлейфа 21.
Штрих-пунктирными линиями показано положение рычагов 15,16 и консоли 17, когда захватный орган 18 расположен над
правым рядом ванн 2 в нижнем и верхнем положениях. При этом ряды ванн 2 и 3 расположены на разных уровнях по высоте. Разность высот Л h равна разности высот конечных положений рычагов 15 и 16.
Перенос подвесок 4 из одного ряда ванн в другой осуществляется следующим образом.
Вначале захватный орган 18 перемещается с помощью привода 13 под переносимую подвеску 4, находящуюся в левом ряду ванн 3. Затем включается привод 11 подъема и каретка 9 с помощью гибкого тягового органа 12 поднимается в верхнее положение. При этом подвеска 4 извлекается из
ванны 3. После чего срабатывает цилиндр 19, поворачивающий рычаги 15 и 16 в правое крайнее положение. Подвеска 4 при этом переносится, совершая плоско-параллельное перемещение, вправо и устанавливается над рядом ванн 2. Высота расположения подвески 4 над ваннами 2 при этом остается такой же, как и над ваннами 3.
После этого включается привод подъема 11 на опускание и каретка 9 опускается в нижнее положение. Подвеска 4 при этом устанавливается на опорные конструкции ванны 2. Перенос подвесок из ванны 2 в ванну 3 осуществляется в обратном порядке.
Предлагаемая конструкция линии позволяет обеспечить хороший доступ ко всем механизмам манипулятора для их обслуживания и ремонта, вынести все механизмы из зоны с повышенным содержанием вредных испарений при многорядном расположении ванн.
Формула изобретения
Линия для нанесения гальванических покрытий, включающая два ряда ванн, установленных параллельно, и консольный манипулятор для их обслуживания с рамой, кареткой вертикального хода и консолью с грузозахватным органом, установленной с
возможностью изменения величины ее вылета, отличающаяся тем, что, с целью повышения надежности путем размещения манипулятора вне зоны с повышенным содержанием агрессивных паров, консоль выполнена в виде двух параллельных рычагов одинаковой длины с приводом поворота, причем одни концы двух шарнирно соединены с грузозахватным органом, а другие - с кареткой вертикального хода, при
этом ванны установлены на разных уровнях, а длина I рычагов соответствует неравенству:
где L - величина изменения вылета консоли.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Путеукладчик А.М.Тройникова | 1988 |
|
SU1587099A1 |
| Грузоподъемный кран | 1989 |
|
SU1735198A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
Использование:изобретение относится к области производства нанесения гальванических покрытий и может быть использовано в различных отраслях народного хозяйства. Сущность изобретения: консоль манипулятора выполнена в виде параллельных рычагов одинаковой длины с приводом поворота. Одни концы двух рычагов ш.ар- нирно соединены с грузозахватным органом, а другие - с кареткой вертикального хода, при этом ванны установлены на разных уровнях. Длина рычагов соответствует неравенству I - , где I - длина рычагов; L - величина изменения вылета консоли. 1 ил,
/Л///Х(
го f
| Автоматическая линия для гальванохимической обработки деталей | 1987 |
|
SU1497294A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Автоматическая гальваническая линия | 1988 |
|
SU1601211A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
