Изобретение относится к погруэочно- транспортному оборудованию, в частности к способам автоматизации контроля и управления погрузочно-транспортных машин (ПТМ), и может найти применение в строительстве, в горной промышленности.
Цель изобретения - повышение эффективности управления путем автоматической корректировки коэффициента заданной загрузки ковша.
Цель достигается тем, что предварительно измеряют время движения машины к месту разгрузки и обратно и время от начала до окончания одного зачерпывания, с учетом которых определяют коэффициент заданной загрузки ковша по формуле
K3 a(t) + b(t)T,
где a(t), b{t) - коэффициенты пвопооцио- нальности производительности при одном зачерпывании и с учетом дочерпыва ний; t - время одного зачерпывания; Т - время движения к месту разгрузки и обратно.
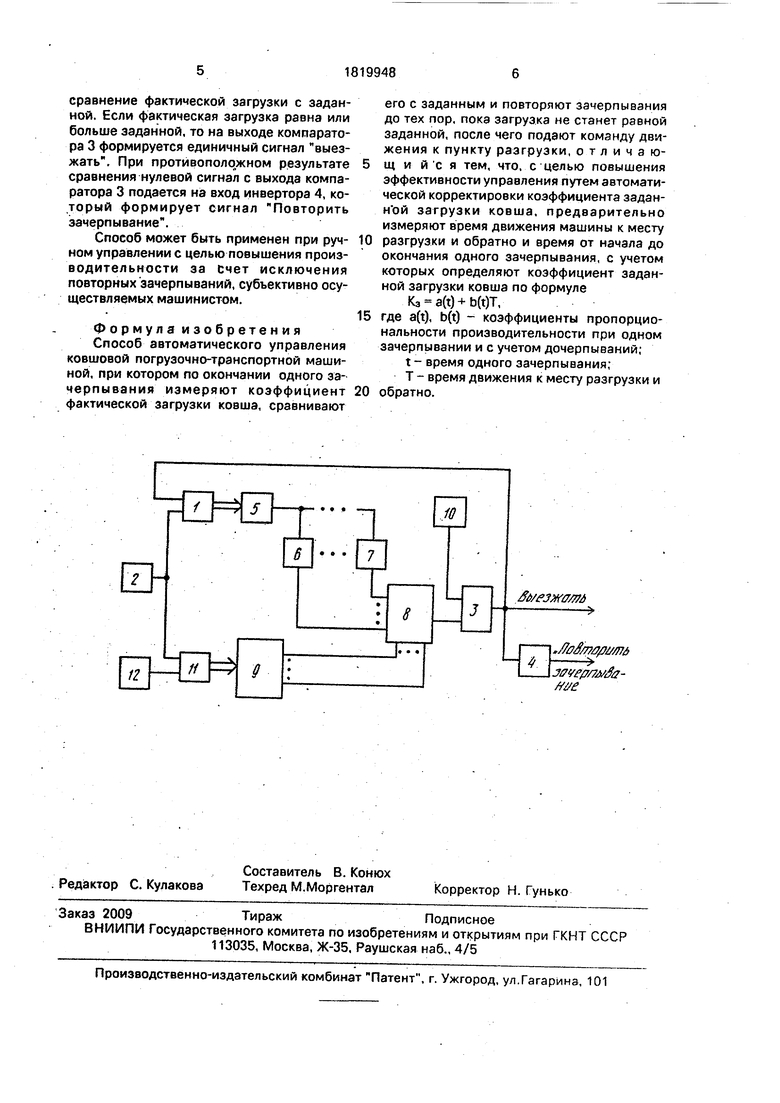
На чертеже приведена функциональная схема устройства для реализации способа.
Устройство содержит таймер 1 формирования интервала времени Т движения И разгрузки, один управляющий вход которого соединен с выходом датчика 2 исходного положения ковша, другой - с выходом компаратора 3, к которому также подключен вход инвертора 4. Выход таймера 1 подключен через цифроаналоговый преобразователь 5 к входам операционных блоков 6...7; выходы которых соединены с аналоговыми входами блока 8 коммутации аналоговых
00
N0
ю
4 00
сигналов. Управляющие входы блока 8 соединены с выходами дешифратора 9, а выход - с одним из входов компаратора 3, другой вход которого соединен с выходом датчика 10 загрузки ковша. Устройство со- держит также таймер 11 формирования интервала времени t зачерпывания, один управляющий вход которого соединен с выходом датчика 2, другой - с выходом датчика 12 транспортного положения ковша, а вы- ход - с входом дешифратора 9.
Суть предлагаемого способа состоит в том, что предварительно рассчитывают сменную производительность для двух стратегий управления: выехать после пер- вого зачерпывания и компенсировать неполную загрузку в дополнительных рейсах за счет экономии времени на повторные зачерпывания; повторять операции зачерпывания до полной загрузки ковша. Расчет производительности производят для различных значений коэффициента загрузки Кз, времени, t зачерпывания и времени Т движения, при этом имитируют процесс случайного заполнения ковша с увеличением коэффициента загрузки в каждом повтор- ном зачерпывании. Затем путем статистической обработки находят коэффициенты a(t), b(t) уравнений для расчета коэффициента К. загрузки, соответствующего одинаковой сменной производительности:
K3 a(t)+b(t)T,О) где a(t), b(t) - коэффициенты, рассчитанные для конкретной машины. Например, уравнения регрессии, рассчитанные для ПТМ ти- па ПДД-8М при времени разгрузки и разворота 60 с, скорости движения 1,5 м/с, длине откатки 25-275 м, времени маневра и контроля загрузки 15с имеют вид
К3 0,326 + 0,000990 Т (t 5 с); Кэ 0,303 + 0,000803 Т (t - 10с); Кз 0,161 +0,001090 Т (t 15 с); (2) К3 0,144+9 (t 20c). Коэффициент Кз представляет собой минимальную загрузку ковша, при которой вывод машины из камеры и компенсация неполной загрузки дополнительными рейсами эквивалентны по сменной производительности повторению зачерпывании до полной загрузки.
Для выбора решения о повторении операции зачерпывания или движения к месту разгрузки измеряют время движения машины к месту разгрузки и обратно, время зачерпывания и определяют по формуле (1) величину заданной загрузки ковша К3. По окончании операции зачерпывания измеряют коэффициент Кф фактической загрузки ковша и сравнивают его с величиной Кз.
При Кф К3 оба решения обеспечивают одинаковую сменную производительность. Если Кф Кз, то принимают решение о движении ПТМ к месту разгрузки, так как выполнение повторных черпаний ведет к потере сменной производительности. Если Кф Кз, то операцию зачерпывания повторяют для увеличения фактической загрузки ковша.
Способ реализуется в устройстве следующим образом.
По окончании цикла погрузки по команде выезжать включается таймер 1, который отсчитывает время Т движения к рудоспуску, разгрузки и обратного движения. После возвращения ПТМ к месту погрузки и установки ковша в исходное для черпания положение срабатывает датчик 2 исходного положения ковша и отключает таймер 1. Одновременно по сигналу от датчика 2 включается таймер 11, который измеряет интервал времени t зачерпывания и отключается по окончании операции зачерпывания сигналом от датчика 12 транспортного положения ковша.
После прекращения отсчета времени движения выходной сигнал таймера 1 преобразуется в аналоговую величину в преоб- разователе 5 и подается на входы операционных блоков 6...7, количество которых соответствует числу уравнений регрессии (2). Операционные блоки 6..,7 осуществляют сложение входного и опорного сигналов, умножая их при этом на некоторые постоянные коэффициенты, которые выбираются в соответствии с коэффициентами уравнений (2). Таким образом, каждый операционный блок реализует одно из уравнений (2) и формирует на своем выходе сигнал, пропорциональный величине заданной загрузки ковша для соответствующего времени зачерпывания. Операционный блок может быть выполнен на основе операционного усилителя.
Выходные сигналы операционных блоков 6...7 подаются одновременно на соответствующие входы блока 8 коммутации. Выбор канала коммутации осуществляется после измерения времени t зачерпывания. Эту функцию выполняет дешифратор 9, который в соответствии с измеренным значением времени t зачерпывания формирует управляющий сигнал на входе блока 8 коммутации. Последний соединяет выход выбранного операционного блока с одним из входов компаратора 3.
. На второй вход компаратора 3 подается сигнал от датчика 10, пропорциональный фактической загрузке ковша после первого зачерпывания. Компаратор 3 осуществляет
сравнение фактической загрузки с заданной. Если фактическая загрузка равна или больше заданной, то на выходе компаратора 3 формируется единичный сигнал выезжать. При противоположном результате сравнения нулевой сигнал с выхода компаратора 3 подается на вход инвертора 4, который формирует сигнал Повторить эачерпывание.
Способ может быть применен при ручном управлении с целью повышения производительности за счет исключения повторных зачерпываний, субъективно осуществляемых машинистом.
Формула изобретения Способ автоматического управления ковшовой погрузочно-транспортной машиной, при котором по окончании одного за- черпывания измеряют коэффициент фактической загрузки ковша, сравнивают
его с заданным и повторяют зачерпывэния до тех пор, пока загрузка не станет равной заданной, после чего подают команду движения к пункту разгрузки, отличающ и и с я тем, что, с целью повышения эффективности управления путем автоматической корректировки коэффициента задан- н ой загрузки ковша, предварительно измеряют время движения машины к месту
разгрузки и обратно и время от начала до окончания одного зачерпывания, с учетом которых определяют коэффициент заданной загрузки ковша по формуле «3 a(t)+b(t)T,
где a(t), b(t) - коэффициенты пропорциональности производительности при одном зачерпываний и с учетом дочерпываний; t - время одного зачерпывания; Т - время движения к месту разгрузки и
обратно.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство регулирования скорости пресс-поршня машины литья под давлением | 1988 |
|
SU1526900A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Цифровое устройство для управления машиной непрерывного литья заготовок | 1989 |
|
SU1632621A1 |
| Способ измерения режимной координаты и устройство для его осуществления | 1983 |
|
SU1127953A1 |
| Устройство для вибрационной очистки стенок емкостей | 1990 |
|
SU1747212A1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Способ определения степени загрузки ковша погрузчика | 1983 |
|
SU1239231A1 |
| ГИРОАЗИМУТГОРИЗОНТКОМПАС | 2001 |
|
RU2202769C2 |
| Система автоматического управления рабочим органом транспортной машины | 1977 |
|
SU940651A3 |
Сущность изобретения: способ автоматического управления ковшовой погрузоч- но-транспортной машиной состоит в том, что предварительно рассчитывают сменную производительность для двух стратегий управления: выехать после первого зачерпывания и компенсировать неполную загрузку в дополнительных рейсах за счет экономии времени на повторные зачерпывания; повторять операции зачерпывзния до полной загрузки ковша. Расчет производительности производят для различных значений коэффициента загрузки Кз, времени t зачерпывания и времени Т движения, при этом имитируют процесс случайного заполнения ковша с увеличением коэффициента загрузки в каждом повторном зачерпыва- нии. Затем путем статистической обработки находят коэффициенты a(t). b(t) уравнений для расчета коэффициента Кз загрузки, соответствующего одинаковой сменной производительности: Кз a(t) + b(t)T, где a(t), b(t) - коэффициенты, рассчитанные для конкретной машины. 1 ил. (Л С
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Астафьев Ю.Л | |||
| и др | |||
| Опыт дистанционного управления погрузочными машинами | |||
| Горный журнал, 1982, № 10, с | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1146382, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
