Изобретение относится к устройствам упрзалемия механизмом блокировки дифференциала.
Цель изобретения - повышение надежности и быстродействия.
На фиг. 1 изображено устройство управления механизмом блокировки дифференциала, содержащее исполнительный орган, выполненный с возможностью автоматического возврата; на фиг.2 - другая форма выполнения устройства согласно фиг,1; на фиг.З - устройство управления механизмом блокировки дифференциала, содержащее исполнительный орган, приводимый в направлениях блокирвоки и освобождения путем подачи энергии; на фиг.4 - устройство управления согласно фиг.1, выполненное в релейной технике и содержащее управляемый рабочей средой исполнительный орган; на фиг.5- другая форма выполнения устройства управления согласно фиг.4; на фиг.б устройство управления согласно фиг.З, выполненное э релейной технике и содержащее управляемый рабочей средой исполнительный орган; на фиг.7 - другая форма выполнения устройства управления согласно фиг.б.
На фиг. 1-7 линии подачи энергии изображены непрерывными линиями, а линии сигнализации или управления - штрихпунк- тирной линией.
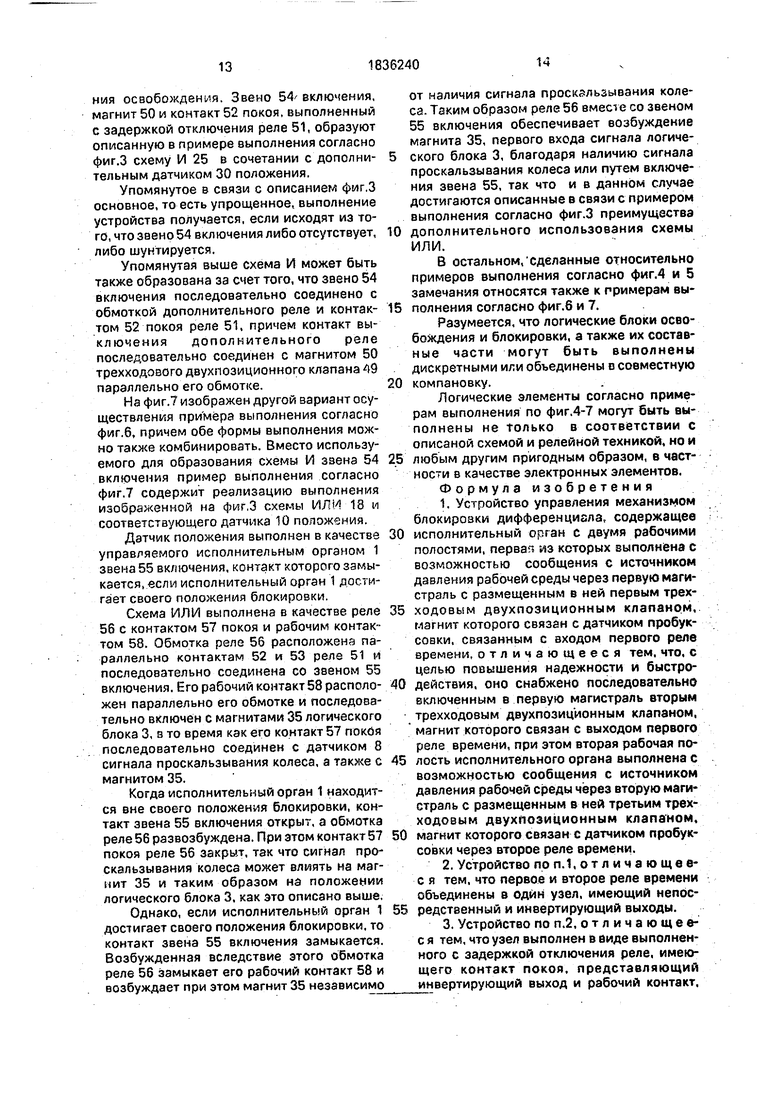
На фиг.1 схематически изображено устройство управления механизмом блокировки дифференциала, имеющее исполнительный орган 1, приводимый в направлении блокировки (стрела S) путем подачи энергии. В качестве энергии используют любой пригодный вид энергии, например электрическую энергию или давление рабочей среды. Исполнительный орган 1 выполнен в соответствии с используемой энергией, в случае использования электроэнергии он выполнен, например, с возможностью управления магнитом, а в случае использования давления - в качестве поршня сервоцилиндра.
Для управления подачей энергии из генератора 2, который также может представлять собой резервуар энергии, в линии подачи энергии между генератором 2 и исполнительным органом 1 установлен логический блок 3 управления.
Логический блок управления 3 имеет первый вход 4 и второй вход 5 сигнала. На первом аходе 4 сигнала логический блок 3 управления соединен с необозначенным выходом схемы И 6, первый вход 7 которой соединен с датчиком 8 сигнала пррсальзы- вания колеса, а второй -вход 9 соединен с датчиком 10 положения. Датчик 10 положения контролирует положение исполнительного органа 1 и отдает постоянный сигнал в качестве сигнала положения, который падает, если при перемещении в направлении
блокировки S исполнительный орган 1 занимает предназначенное положение.
Кроме того, датчик 8 сигнала проскальзывания колеса соединен с входом реле 11 времени, выполненного с возможностью задержки отключения, период которой выбран с учетом эксплуатационных условий и/или вида транспортного средства и предварительно установлен или может быть установлен в процессе работы. Выход реле 11
5 времени соединен с вторым входом 5 сигнала логического блока 3 управления.
Логический блок 3 управления выполнен так, что при отсутствии входных сигналов он занимает основное положение, при
0 нагрузке обоих входов 4 и 5 сигнала-поло- жение готовности, а при нагрузке только второго входа 5 сигнала - рабочее положение, в котором он подает энергию.
При дальнейшем описании принципа
5 действия изображенного устройства управления предлагаемося, что схема 1Л 6 и датчик 10 положения отсутствуют, а датчик 8 сигнала проскальзывания колеса непосредственно соединен с первым входом 4 сигнала
0 логического блока 3 управления. Такое предположение допустимо, потому что указанные элементы ненужны для надежной работы устройства согласно простейшей форме выполнения.
5 Во время нормальной работы датчик 8 сигнала проскальзывания колеса не отдает сигнала проскальзывания колеса, так что оба входа 4 и 5 сигнала логического блока 3 управления находятся в состоянии рэзвоз0 буждения, логический блок 3 управления - в основном положении, исполнительный орган 1 - в положении освобождения, а механизм блокировки дифференциала - в состоянии освобождения.
5 з случае, если по меньшей мере одно приводимое колесо, принадлежащее к изображенным устройствам управления, проворачивается, то датчик 8 выдает сигнал проскальзывания колеса, который в качест0 ее зависящего от проскальзывания колеса сигнала подают на первый вход 4 логического блока 3 управления и на вход реле 11 времени, которое подает выходной сигнал на второй вход 5 логического блока 3 управ5 ления. Поскольку теперь оба входа 4 и 5 сигнала логического блока 3 управления возбужденьк логический блок 3 управления занимает вышеупомянутое положение готовности, в котором исполнительный орган 1 остается в положении освобождения.
После синхронизации проворачивающего колеса, что может осуществляться, например, при помощи общеизвестного приспособления синхронизации, сигнал проскальзывания колеса падает на датчике 8, на первом входе 4 логического блока 3 управления, а также на реле 11 времени. Первый вход 4 логического блока 3 управления находится теперь в состоянии развоз- буждения, в то время как второй вход 5 сигнала остается в состоянии возбуждения вследствие отключения реле 11 времени. Вследствие этого логический блок 3 управления занимает свое рабочее положение, в котором он подает энергию на исполнительный орган 1, в результате чего последний приводится в направлении блокировки и при этом включает механизм блокировки дифференциала. Логический блок 3 блокировки остается в рабочем положении, благодаря чему подача энергии на исполнительный орган1 сохраняется до тех пор, пока после окончания выдержки времени при отключении выхожной сигнал реле 11 времени не падает. Затем оба входа 4 и 5 сигнала логического блока 3 управления опять развозбуждены. При этом логический блок 3 управления возвращается в основное положение, причем он прекращает подачу энергии на исполнительный орган 1 и позволяет исполнительному органу 1 возвращаться в исходное положение посредством автоматического возвратного приспособления, например возвратной пружины.
Резюмируя вышеизложенное, принцип действия описанного устройства управления заключается в том, что на основании сигнала проскальзывания колеса оно автоматически включает механизм блокировки дифференциала и снова освобождает, то есть выключает, его после окончания выдержки времени при отключении, осуществляемой реле времени.
В случае, если во время выдержки времени при отключении возникает повторный сигнал проскальзывания колеса, то логический блок 3 управления переходит из рабочего положения в положение готовности, в результате чего исполнительный орган 1 возвращается в положение освобождения. Таким образом повторный сигнал проскальзывания колеса прекращает работу механизма блокировки дифференциала. Этот эффект предотвращается за счет использования схемы И б в сочетании с датчиком 10 положения. При такой форме выполнения на первый вход 4 сигнала логического блока управления 3 может поступать выходной сигнал схемы И 6 в качестве зависящего от
проскальзывания колеса сигнала только в том, случае, если датчик 8 выдает сигнал проскальзывания колеса, то и датчик 10 выдает сигнал положения. Однако сигнал положения больше не существует, если при перемещении в направлении блокировки исполнительный орган 1 достигает вышеупомянутого предназначенного положения. Другими словами, после достижения исполнитёльным органом 1 этого положения схема И 6 блокиролвана со стороны выхода, вследствие чего логический блок управления 3 блокирован в рабочем положении до окочания выдержки времени при отключении, осуществляемой реле 11 времени. Во многих случаях целесообразным будет определение упомянутого положения с таким расчетом, что оно уже достигнуто, если исполнительный орган покидает свое положёние освобождения.
Позицией 12 обозначено произвольно управляемое приспособление включения и/или выключения/посредством которого обслуживающий персонал может влиять на
описанные автоматические процессы в устройство управления.
Пример выполнения согласно фиг.2 отличается от предыдущего примера выполнения только тем, что схема И б заменена на
логическую схему 13, причем, однако, датчик 10 положения, контролирующий положение исполнительного органа 1, выполнен так, что он отдает сигнал положения, если исполнительный .орган 1 достигает вышеупомянутого предназначенного положения
в направлении S блокировки. Схема 13 по
р входу соединена с датчиками 8 и 10. Схема
13 выполнена так. что при наличии сигнала
положения не может выдать выходного сигнала в качестве зависящего от проскальзывания колеса сигнала. Таким образом схема 13 согласно этому примеру выполнения дей ствует в сочетании с датчиком 10 так же как и схема И 6 предыдущего примера выполнения.
. В остальном данный пример выполнения работает тем .же образом, что и предыдущий.
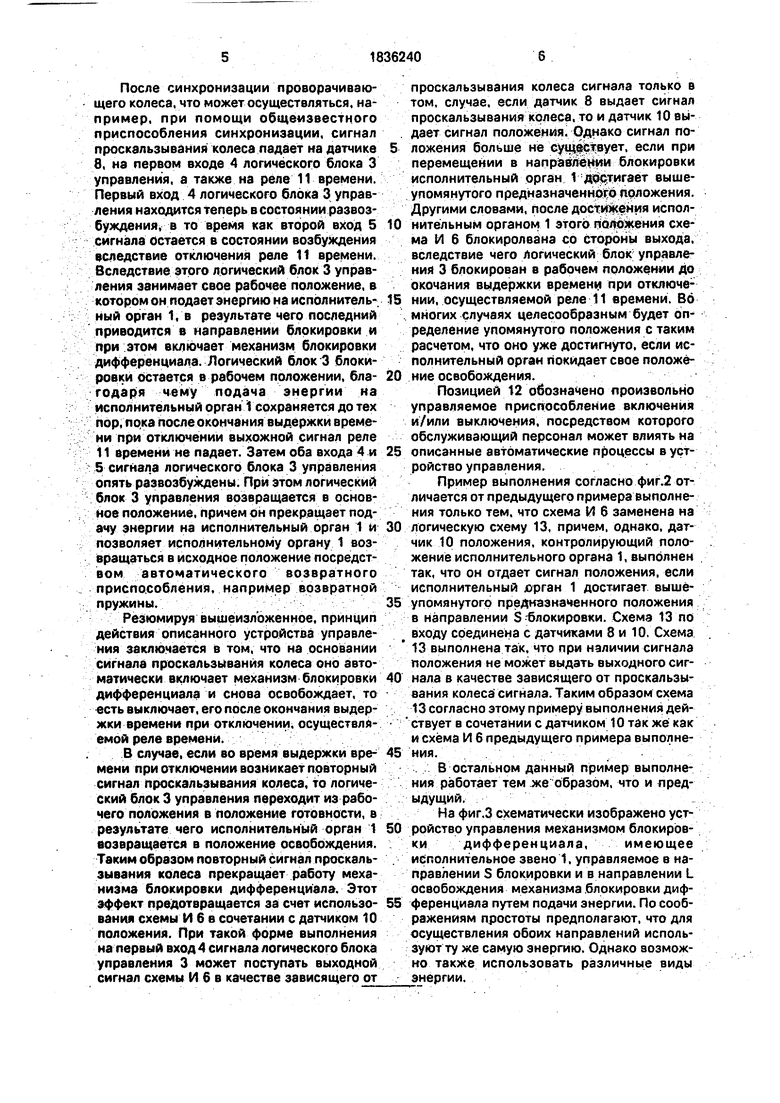
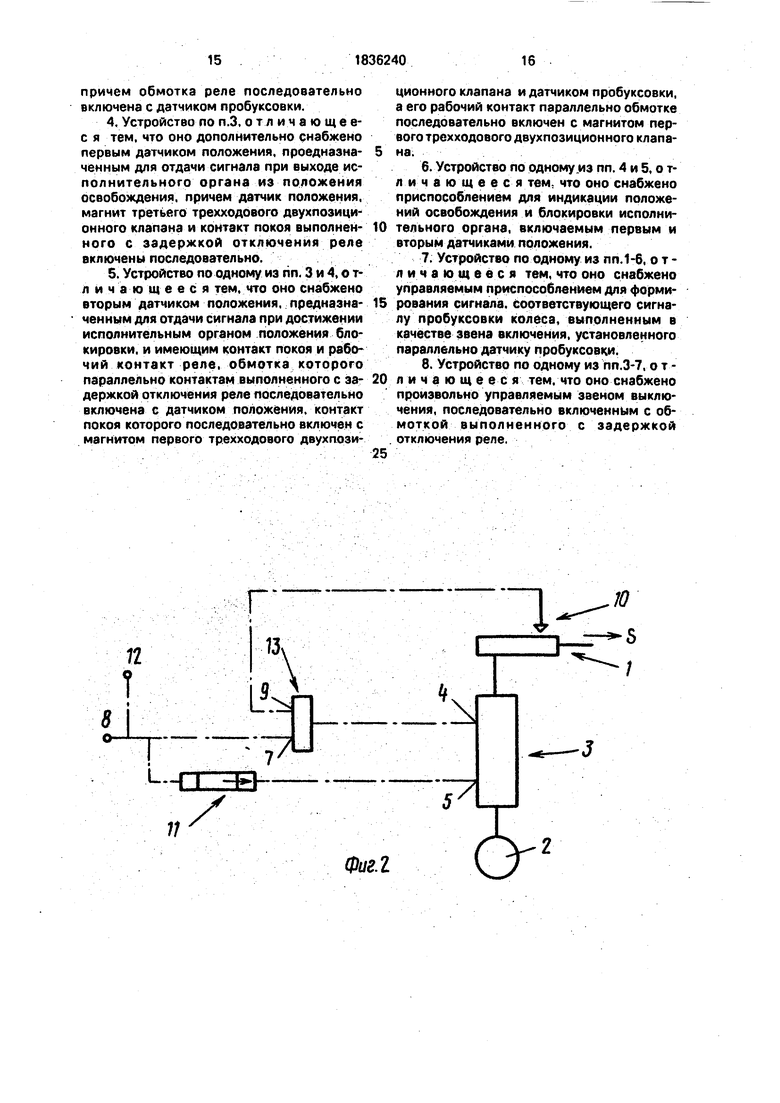
На фиг.З схематически изображено устройствр управления механизмом блокировки дифференциала, имеющее исполнительное звено 1, управляемое в направлении S блокировки и в направлении L освобождения механизма блокировки дифференциала путем подачи энергии. По соображениям простоты предполагают, что для осуществления обоих направлений используют ту же самую энергию. Однако возможно также использовать различные виды энергии.
С целью управления подачей энергии из генератора 2, в линиях между генератором 2 и исполнительным органом 1 размещены логическая схема 14 блокировки (в направлении S блокировки) и логическая схема 15 освобождения (в направлении L освобождения). По конструкции и принципу действия логическая схема 14 блокировки соответствует логическому блоку 3 управления на фиг. 1.
Первый вход 16 сигнала логической схемы 14 блокировки соединен с выходом 17 схемы ИЛИ 18, первый вход 19 которой соединен с датчиком 8, а второй вход 20 - с датчиком 10 положения, который контролирует положение исполнительного органа 1 и выдает сигнал блокировки, если исполнительный орган 1 достигает положения блокировки.
Второй вход 21 сигнала логической схемы 14 блокировки соединен с выходом 22 первого реле 11 времени, которое по конструкции и принципу действия соответствует реле 11 времени на фиг.1.
Логическая схема 15 освобождения выполнена в виде схемы ДА, то есть она отдает энергию, если она возбуждается на своем (единственном) входе 23 сигнала, соединенном с выходом 24 схемы И 25, первый вход 26 которой соединен с выходом 27 второго реле 28, времени, выполненного с возможностью задержки времени отключения, а второй вход 29 которой соединен с дополнительным датчиком 30 положения, выдающим сигнал положения, когда исполнительный орган 1 выходит из положения освобождения.
Второе деле 28 времени, так же как и первое реле 11 времени, со стороны входа соединено с датчиком 8 синхронизировано с ним, причем, однако, оно действует инвер- тирующе, то есть выдает выходной сигнал при отсутствии сигнала проскальзывания колеса. Из этого, в частности, следует, что второе реле 28 времени выдает выходной сигнал после окончания выдержки времени при отключении, осуществляемой обоими реле 11 и 28 времени.
При описании принципа действия данного устройства управления начала предполагается, что отсутствуют схема ИЛИ 18 и датчик 10 положения, в также схема И 25 и датчик 30 полох ения. При этом, так же как и согласно примеру выполнения по фиг. 1, датчик 8 сигнала проскальзывания колеса соединен непосредственно с первым входом 16 сигнала логической схемы 14 блокировки. Кроме того, Вигход второго, реле 28 времени непосредственно соединен с входом 23 сигнала логической схемы 15 освобождения. Таким образом и в данном случае получается простейшая форма выполнения устройства по фиг.З, для надежной работы которого не нужны упомянутые элементы.
Логическая схема 15 блокировки действует в сочетании с первым реле 11 времени в направлении S блокировки исполнительного органа 1 тем же образом, что и соответствующий пример выполнения согласно
0 фиг.1.
Вследствие инвертирующего действия второго реле 28 времени вход 23 логической схемы 15 всегда возбуждается или развоз- буждается в том случае, если логическая
5 схема 14 блокировки развозбуждена или возбуждена на своем втором входе 21 сигнала. Таким образом, логическая схема 15 освобождения всегда отдает энергию на исполнительный орган 1 в направлении L ос0 вобождения, если логическая схема 14 находится в основном положении или положении готовности.
Другими словами, в данном примере выполнения логическая схема 14 блокиров5 ки и логическая схема 15 освобождения связаны друг с другом так, что при возвращении логической схемы 14 из рабочего положения исполнительный орган 1 возвращается логической схемой 15 путем
0 подачи энергии в направлении освобождения.
Дополнительные элементы, схема ИЛИ 18 в сочетании с датчиком 10 положения и схема И 25 в сочетании с датчиком 30 могут
5 быть включены в основное выполнение данного устройства отдельно или вместе.
Схема ИЛИ 18 в сочетании с датчиком 10 положения обеспечивает то, что первый вход 16 логической схемы 14 возбуждается
0 не только выходным сигналом схемы ИЛИ 18, являющимся зависящим от проскальзывания колеса сигнала, при отдаче датчиком 8 сигнала проскальзывания колеса, но и перемещением исполнительного органа 1 в
5 его положение блокировки. Таким образом, логическая схема 14 блокировки возвращается из рабочего положения в положение готовности не только при наличии сигнала проскальзывания колеса, ко и при входе
0 исполнительного органа 1 э его положение блокировки. Таким образом, указанный вариант устройства по фиг.З имеет два преимущества. С одной стороны, он обеспечивает немедленное снятие энергии
5 с исполнительного органа 1 после достижения им положения блокировки, благодаря чему обеспечивается упрощение конструкции исполнительного.органа. С другой стороны, он предотвращает повторную подачу энергии на находящийся в положении блокировки исполнительный орган 1 в направлении блокировки S, когда повторяется сигнал проскальзывания колеса во время выдержки времени при отключении, осуществляемой реле 11 и 28 времени.
Схема И 25 блокирована в том случае, если исполнительный орган 1 находится в своем положении освобождения, так как она не получает входного сигнала от дополнительного датчика положения 30. В этом состоянии логическая схема 15 освобождения не может получать входного сигнала на входе 23, вследствие чего не может отдавать энергии на исполнительный орган 1 в направлении L освобождения. Таким образом указанный вариант имеет то преимущество, что при нормальной эксплуатации (положение освобождения) исполнительный орган 1 постоянно не нагружен энергией и поэтому он может быть выполнен более простым.
Первое реле 11 времени и второе реле 28 времени могут быть объединены в одно реле времени, имеющее непосредственный выход и инвертирующий выход.
В остальном все замечания относительно вышеприведенных примеров выполнения являются действительными и для данного примера выполнения,
В варианте выполнения предлагаемого устройства по фиг.З можно использовать любые пригодные релейные и логические элементы.
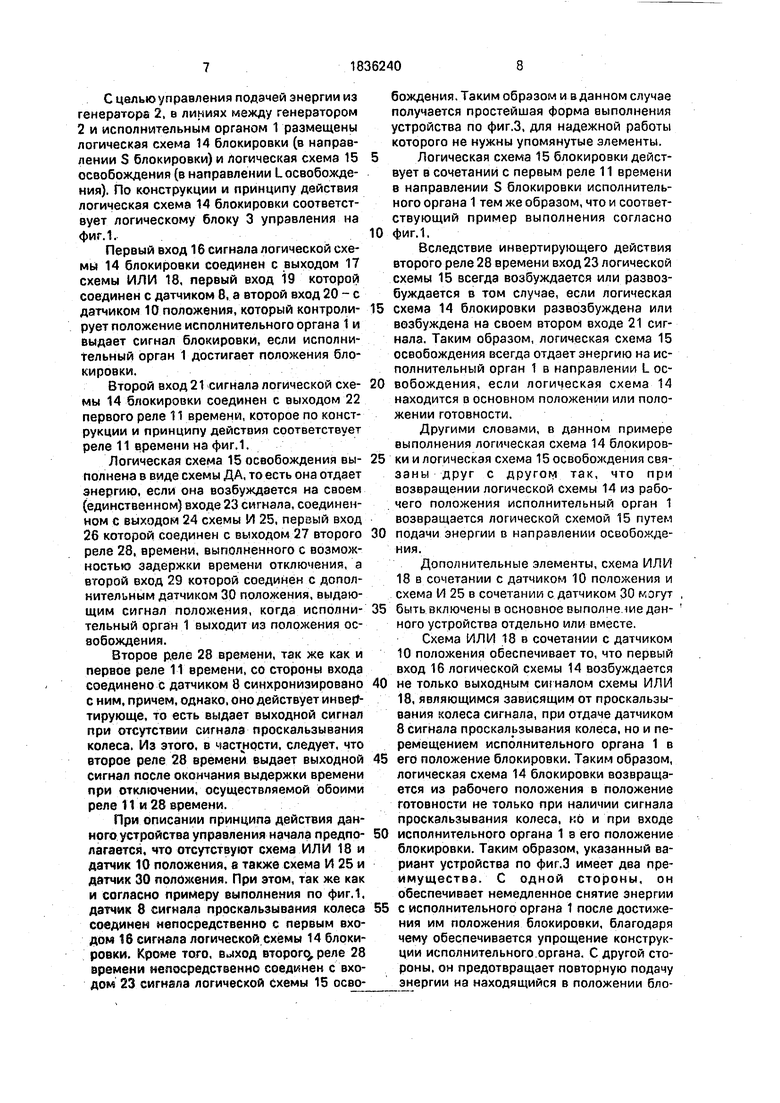
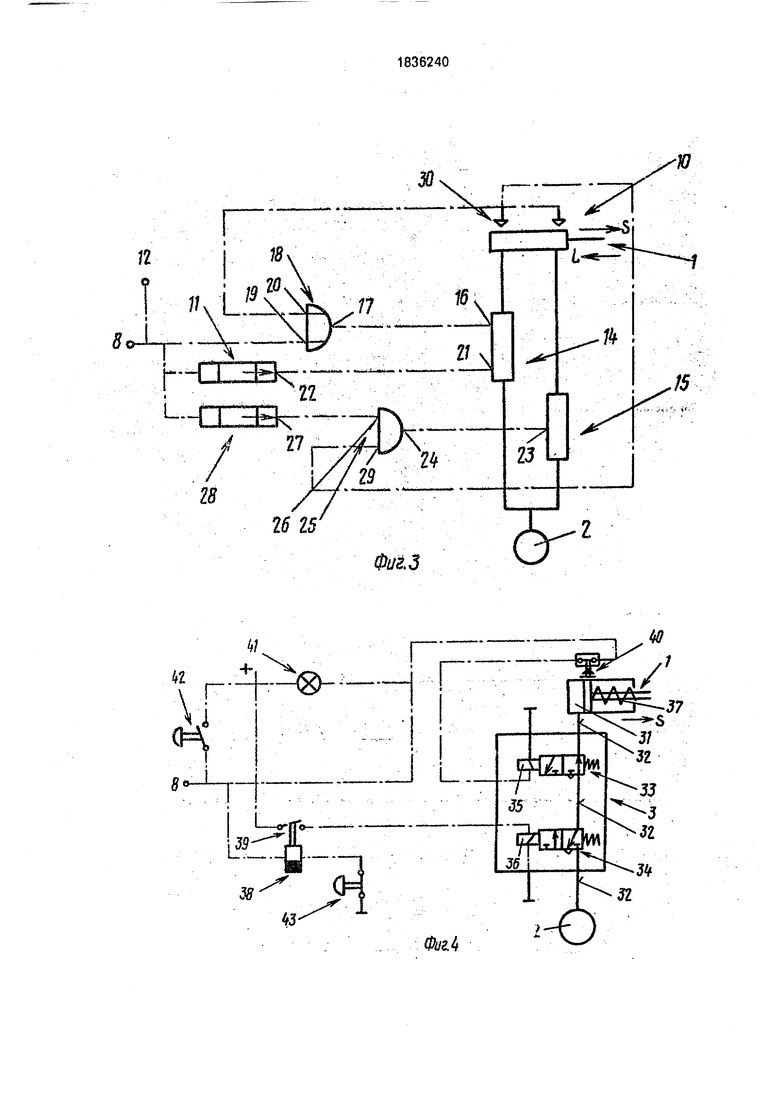
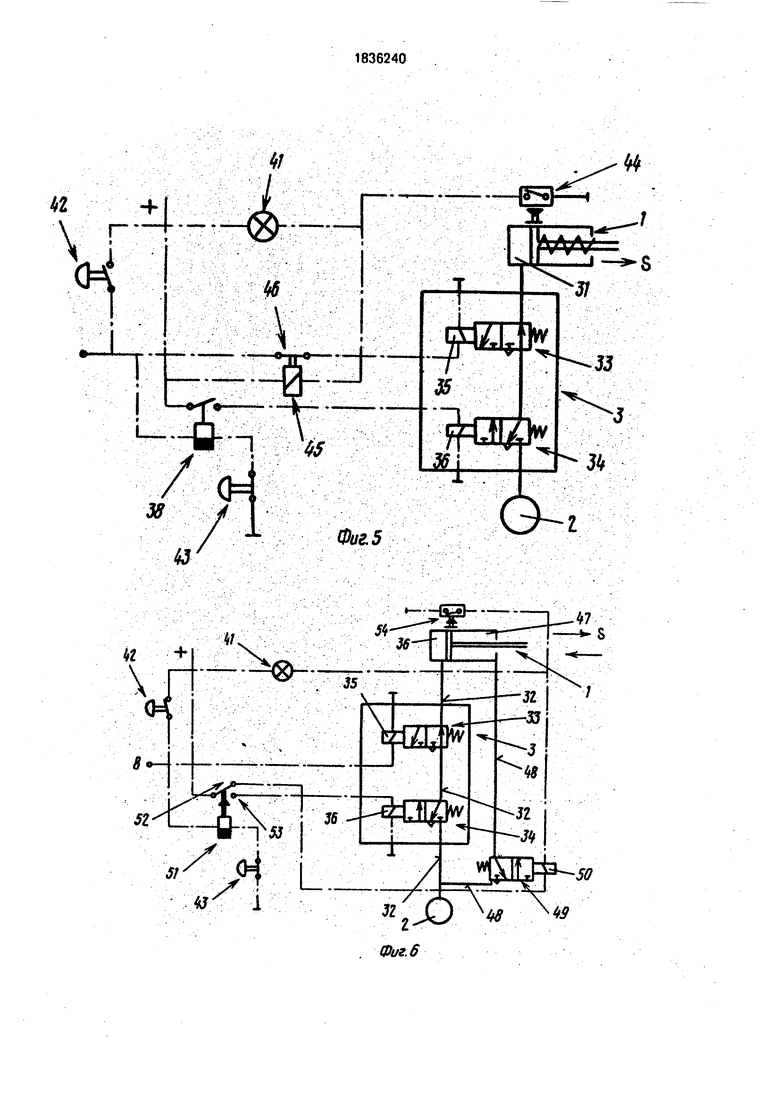
На фиг.4 схематически представлен пример осуществления устройства согласно фиг.1. Это устройство управления механизмом блокировки дифференциала содержит исполнительный орган 1, перемещаемый в направлении S блокировки путем подачи в камеру 31 рабочей среды. В качестве генератора 2 предусмотрен сборник рабочей среды, в ведущей к камере 31 напорной линии 32 которого установлен логический блок 3 управления, выполненный в виде двух последовательно расположенных трехходовых двухпозиционных клапанов 33 и 34, управляемых магнитами 35 и 36.
Возврат исполнительного органа 1 в направление или положение освобождения осуществляется посредством возвратной пружины 37. При этом клапан 34 при возбуждении соответствующего магнита 36 является проходным, а клапан 33 при возбуждении соответствующего магнита 35 является непроходным. Магнит 35 первого трехходового двухпозиционного клапана 33 служит в качестве певрого входа сигнала, а магнит 36 второго трехходового двухпозиционного клапана 34 служит в качестве второго входа сигнала логического блока управления 3. В данном примере выполнения используют логические элементы обыч- . ной конструкции.
В качестве реле времени с замеддлен- ным отпусканием служит реле 38 с замыкающим контактом 39, обмотка которого установлена последовательно с датчиком 8 сигнала проскальзывания колеса, а контакт 39 которого установлен последовательно с магнитом 36 в его контуре возбуждения.
0 Установленная перед магнитом 35 в качестве первого входа сигнала логического блока управления13 схема И образуется служащим в качестве датчика положения 10 на фиг.1 звеном 40 выключения и датчиком 8,
5 причем датчик 8 и звено 40 выключения образуют входы схемы И. При этом звено 40 выключения управляется исполнительным органом 1 так, что его контакт открывается, когда исполнительный орган 1 достигает
0 предназначенного положения в направлении S блокировки.
В основном положении логического блока 3 управления оба магнита 35 и 36 находятся в состоянии развозбуждения. Так
5 как в этом состоянии ближайший к сборнику рабочей среды второй трехходовой двухпо- зиционный клапан 34 находится в положений блокировки, ведущий непосредственно к камере 31 участок напорной линии 32 и
0 таким образом и камера 31 не находится под давлением. В случае, если оба магнита 35 и 36 возбуждены, второй трехходовой двухпо- зиционный клапан 34 является проходным, первый клапан 33 находится в положении
5 блокировки, а логический блок 3 управления находится в положении готовности, в котором ведущий непосредственно к камере 31 участок напорной линии 32 и камера 31 остаются без давления. Только тогда, когда
0 магнит 35 первого клапана 33 опять развозбуждается, подаваемое вторым клапаном 34
давление может поступать в упомянутый
участок напорной линии 32 и таким образом
и в камеру 31, вследствие чего исполнитель5 ный орган 1 перемещается в направлении S. Упомянутое в связи с описанием фиг.1 упрощенное выполнение устройства получается согласно фиг.4 в том случае, если звено 40 выключено либо отсутствует и сиг0 нальный провод датчика 8 сигнала проскальзывания колеса подключается к магниту 35, либо шунтируется.
В качестве дополнительного оборудования можно использовать индикаторное при5 способление 41, установленное последовательно со звеном 40 выключения и позволяющее контроль функции устройства управления.
Кроме того, можно использовать еще коммутационные звенья 42 и 43, реализующие приспособление 12 в примере выполнения по фиг.1 и позволяющие произвольное воздействие обслуживающего персонала на устройство управления. При этом коммутационное звено 42 выполнено в качестве элемента включения, переключающего датчик 8 через параллельный контур тока. Коммутационное звено 43 выполнено в качестве последовательно установленного с катушкой реле 38 элемента включения. На фиг.5 изображен пример выполнения согласно фиг.4 с выполнением датчика положения и схемы в соответствии с примером выполнения согласно фиг.2.
В качестве датчика положения служит в данном случае управляемое исполнительным органом 1 звено 44 включения с контактом, который замыкает в том случае, если исполнительный орган 1 достигает предназначенного положений в направлении S блокировки.
В данном случае схема образуется за счет того, что звено 44 включения последовательно установлено с обмоткой реле 45, контакт 46 выключения которого последовательно установлен с датчиком 8 и магнитом 35 первого трехходового двухпозиционного клапана 33.
После достижения исполнительным органом 1 предназначенного положения в на- правлении блокировки, через замыкающийся контакт звена 44 включения возбуждается обмотка реле 45 и его контакт 46 открывается, в результате чего магнит 35 не может возбуждаться, то есть схема не отдает выходного сигнала и нагрузка камеры 31 рабочей средой во время выдержки времени при отключении реле 38 не может прекращаться повторным сигналом проскальзывания колеса.
В остальном приведенные выше в связи с описанием примера выполнения по фйг.4 замечания являются действительными и для данного примера выполнения.
На фиг.6 схематически изображен пример осуществления устройства управления по фиг.З. Это устройство содержит управляемый рабочей средой исполнительный орган 1, перемещаемый в направлении S блокировки путем подачи в камеру 31 рабочей среды, а в направлении L освобождения - путем подачи в камеру 47 рабочей среды, Как уже упоминалось, исполнительный орган 1 не должен управляться одинаковым видом энергии в обоих рабочих направлениях.
Устройство по фиг.6 содержит служащую в качестве логической схемы дсаобож- дения схему ДА, аыполненную а качестве расположенного в напорной линии 48 между сборником 2 рабочей среды и камерой 47 управляемого магнитом трехходового двухпозиционного клапана 49, магнит 50 которого представляет собой вход сигнала
логической схемы освобождения. Трехходовой двухпозиционный клапан 49 выполнен, что при развозбужденном магните 50 запирает проход напорной линии 48, вследствие чего камера 47 разгружается, а при возбуж0 денном магните 50 открывает упомянутый проход, в результате чего в камеру 47 подается рабочая среда.
Логические элементы этого примера выполнения также выполнены в соответствии
5 с известной коммутационной и релейной техникой.
В качестве реле времени с задержкой отключения использовано выполнение с задержкой отключения реле 51 с контактом 52
0 покоя и рабочим контактом 53, обмотка которого последовательно установлена с датчиком 8 сигнала проскальзывания колеса.
Контакт 52 покоя представляет собой инвертирующий выход, .э рабочий контакт
5 53 - непосредственный выход реле 51. Таким образом реле 51 включает в себя первое 11 и второе 28 реле времени, содержащиеся в устройстве согласно фиг.З,
Контакт 52 покоя и магнит 50 трехходо0 вого двухпозиционного клапана 49 включены последовательно, в то время как с рабочим контактом 53 последовательно соединен магнит 36 трехходового двухпозиционного клапана 34 логического блока 3.
5 По конструкции и принципу действия реле 51 видно, что при возникновении сигнала проскальзывания колеса оно осуществляет переключение с контакта 52 покоя на рабочий контакт 53, сохраняет это рабочее
0 положение при спаде сигнала проскальзывания колеса до окончания выдержки времени отключения и затем осуществляет обратное переключение с рабочего контакта 53 на контакт 52 покоя. Таким образом в
5 зависимости от наличия сигнала проскальзывания колеса и в соответствии с работой реле времени 51 попеременно возбуждает и развозбуждает упомянутый магнит логического блока 3 и магнит 50 служащего в
0 качестве логической схемы освобождения трехходового двухпозиционного клапана 49 и таким образом обеспечивает упомянутые в связи с описанием примера выполнения согласно фиг.З существенные функции реле
5 11 и 28 времени.
С магнитом 50 последовательно соединено еще управляемое исполнительным органом 1 звено 54 включения, контакт которого замыкается е том случае, если исполнительный орган 1 выходит из положения освобождения. Звено 5Ф включения, магнит 50 и контакт 52 покоя, выполненный с задержкой отключения реле 51, образуют описанную в примере выполнения согласно фиг.З схему И 25 в сочетании с дополнительным датчиком 30 положения.
Упомянутое в связи с описанием фиг.З основное, то есть упрощенное, выполнение устройства получается, если исходят из того, что звено 54 включения либо отсутствует, либо шунтируется.
Упомянутая выше схема И может быть также образована за счет того, что звено 54 включения последовательно соединено с обмоткой дополнительного реле и контактом 52 покоя реле 51, причем контакт выключения дополнительного реле последовательно соединен с магнитом 50 трехходового двухпозиционного клапана 49 параллельно его обмотке.
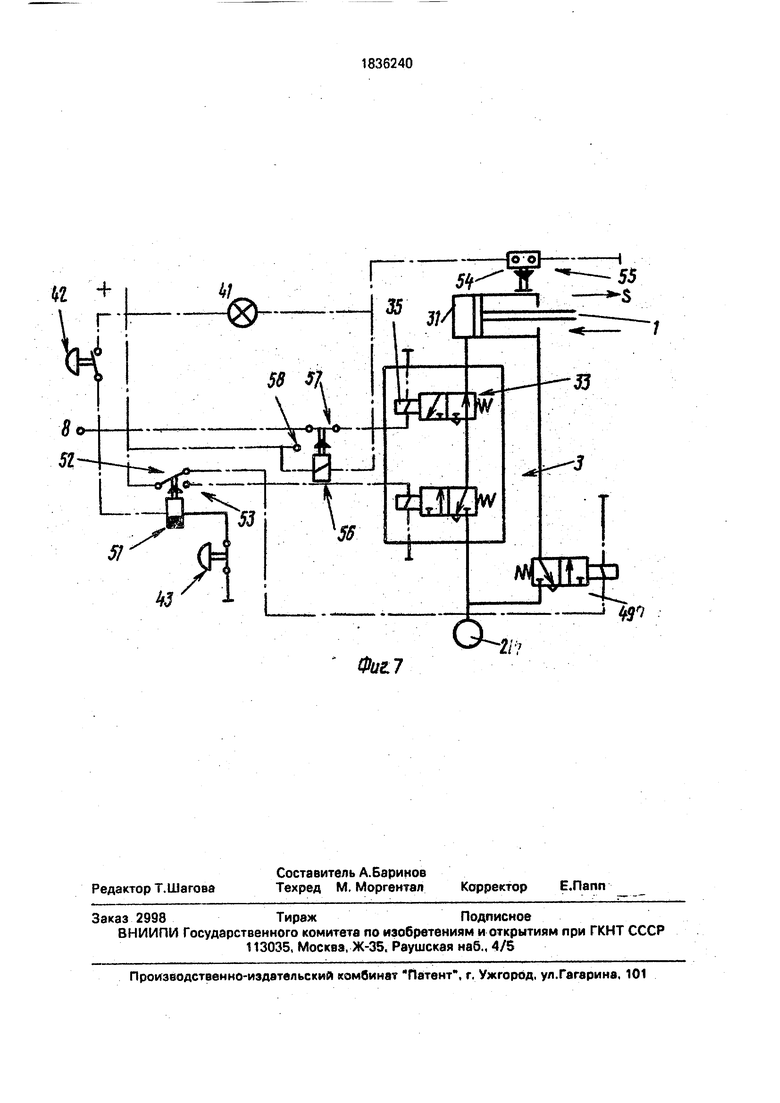
На фиг. изображен другой вариант осуществления примера выполнения согласно фиг.6, причем обе формы выполнения можно также комбинировать. Вместо используемого для образования схемы И звена 54 включения пример выполнения согласно фиг,7 содержит реализацию выполнения изображенной на фиг.З схемы ИЛИ 18 и соответствующего датчика 10 положения.
Датчик положения выполнен в качестве управляемого исполнительным органом 1 звена 55 включения, контакт которого замыкается, если исполнительный орган 1 достигает своего положения блокировки.
Схема ИЛИ выполнена в качестве реле 56 с контактом 57 покоя и рабочим контактом 58. Обмотка реле 56 расположена параллельно контактам 52 и 53 реле 51 и последовательно соединена со звеном 55 включения. Его рабочий контакт 58 расположен параллельно его обмотке и последовательно включен с магнитами 35 логического блока 3, в то время как его контакт 57 покоя последовательно соединен с датчиком 8 сигнала проскальзывания колеса, а также с магнитом 35.
Когда исполнительный орган 1 находится вне своего положения блокировки, контакт звена 55 включения открыт, а обмотка реле 56 развозбуждена. При этом контакт 57 покоя реле 56 закрыт, так что сигнал проскальзывания колеса может влиять на магнит 35 и таким образом на положении логического блока 3, как это описано выше.
Однако, если исполнительный орган 1 достигает своего положения блокировки, то контакт звена 55 включения замыкается. Возбужденная вследствие этого обмотка реле 56 замыкает его рабочий контакт 58 и возбуждает при этом магнит 35 независимо
от наличия сигнала проскальзывания колеса. Таким образом реле 56 вместе со звеном 55 включения обеспечивает возбуждение магнита 35, первого входа сигнала логиче- ского блока 3, благодаря наличию сигнала проскальзывания колеса или путем включения звена 55, так что и в данном случае достигаются описанные в связи с примером выполнения согласно фиг.З преимущества 0 дополнительного использования схемы ИЛИ.
В остальном, сделанные относительно примеров выполнения согласно фиг.4 и 5 замечания относятся также к примерам вы- 5 полнения согласно фиг.б и 7.
Разумеется, что логические блоки освобождения и блокировки, а также их состав- ные части могут быть выполнены дискретными или объединены в совместную 0 компановку.
Логические элементы согласно примерам выполнения по фиг.4-7 могут Быть выполнены не только в соответствии с описаной схемой и релейной техникой, но и 5 любым другим пригодным образом, в частности в качестве электронных элементов.
Формула изобретения
1.Устройство управления механизмом блокировки дифференциала, содержащее
0 исполнительный орган с двумя рабочими полостями, первая из которых выполнена с возможностью сообщения с источником давления рабочей среды через первую магистраль с размещенным в ней первым трех- 5 ходовым двухпозиционным клапаном, магнит которого связан с датчиком пробуксовки, связанным с входом первого реле времени, отличающееся тем, что, с целью повышения надежности и быстроо действия, оно снабжено последовательно включенным в первую магистраль вторым трехходовым двухпозиционным клапаном, магнит которого связан с выходом первого реле времени, при этом вторая рабочая по- 5 лость исполнительного органа выполнена с возможностью сообщения с источником давления рабочей среды через вторую магистраль с размещенным в ней третьим трехходовым двухпозиционным клапаном, 0 магнит которого связан с датчиком пробуксовки через второе реле времени.
2.Устройство по п. 1, о т л и ч а ю щ е е- с я тем, что первое и второе реле времени объединены в один узел, имеющий непос5 родственный и инвертирующий выходы.
3.Устройство по п.2, отличающее- с я тем, что узел выполнен в виде выполненного с задержкой отключения реле, имеющего контакт покоя, представляющий инвертирующий выход и рабочий контакт.
причем обмотка реле последовательно включена с датчиком пробуксовки.
4,Устройство по п.З, о т л и ч а ю щ е е- с я тем, что оно дополнительно снабжено первым датчиком положения, проедназна- ченным для отдачи сигнала при выходе исполнительного органа из положения освобождения, причем датчик положения, магнит третьего трехходового двухпозици- онного клапана и контакт покоя выполненного с задержкой отключения реле включены последовательно.
5.Устройство по одному из пп. 3 и 4, о т- л и ч а ю щ е е с я тем, что оно снабжено вторым датчиком положения, предназначенным для отдачи сигнала при достижении исполнительным органом положения блокировки, и имеющим контакт покоя и рабочий контакт реле, обмотка которого параллельно контактам выполненного с задержкой отключения реле последовательно включена с датчиком положения, контакт покоя которого последовательно включен с магнитом первого трехходового двухпозиционного клапана и датчиком пробуксовки, а его рабочий контакт параллельно обмотке последовательно включен с магнитом первого трехходового двухпозиционного клапа- на.
6.Устройство по одному из пп. 4 и 5, о т- лишающееся тем; что оно снабжено приспособлением для индикации положений освобождения и блокировки исполнительного органа, включаемым первым и вторым датчиками положения.
7.Устройство по одному из пп.1-6, отличающееся тем, что оно снабжено управляемым приспособлением для формирования сигнала, соответствующего сигналу пробуксовки колеса, выполненным в качестве звена включения, установленного параллельно датчику пробуксовки.
8.Устройство по одному из пп.3-7, о т - л и ч а ю щ е ее я тем. что оно снабжено
произвольно управляемым звеном выключения, последовательно включенным с обмоткой выполненного с задержкой отключения реле.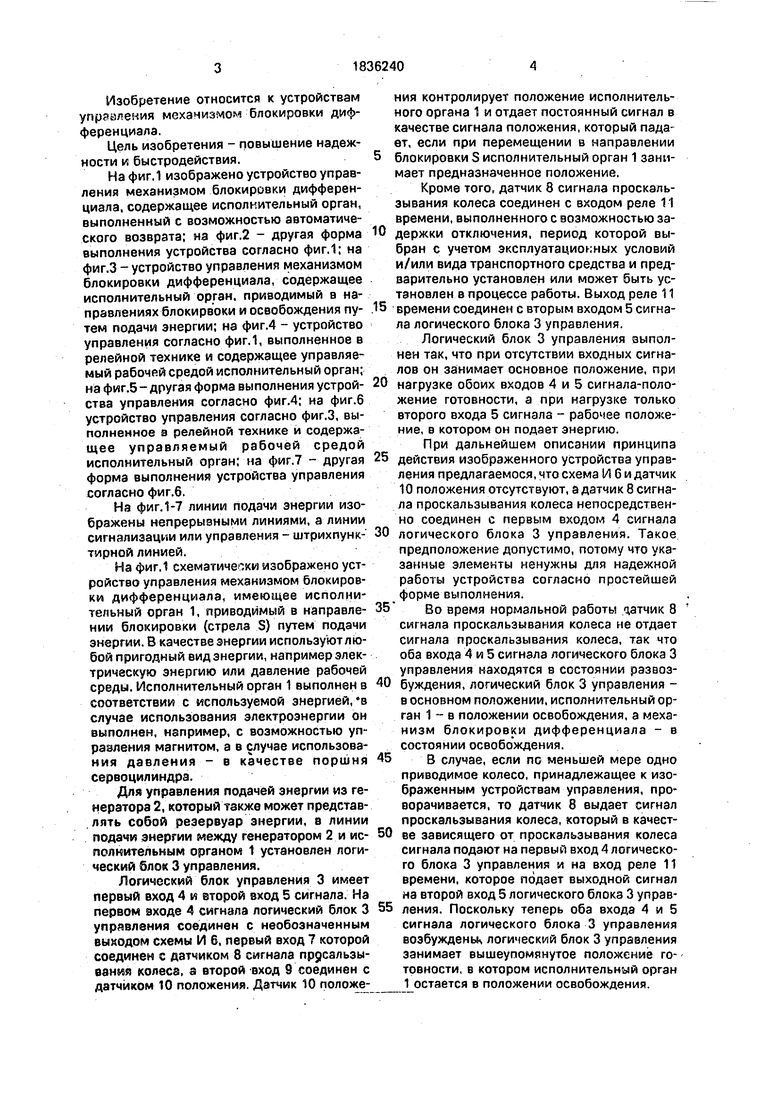
Изобретение относится к устройствам управления механизмом блокировки дифференциала. Цель изобретения - повышение надежности и быстродействия. К 11 7 Устройство управления механизмом блокировки дифференциала содержит исполнительный орган 1, перемещаемый в направлении блокировки дифференциала путем подачи энергии, логический блок 3 управления подачей энергии, имеющий два входа 4 и 5 сигнала, причем по первому входу он может получать зависящий от проскальзывания колеса сигнал (далее: сигнал проскальзывания колеса), а блок управления выполнен так, что при нагрузке только своего второго входа сигнала подает энергию на исполнительный орган, а также выполненные с задержкой отключения реле времени, на которое подается сигнал проскальзывания колеса в качестве входного сигнала, а выходной сигнал которого подается на второй вход 5 сигнала логического блока 3 управления 7 з.п.ф-лы, 7 ил. ю W Ё 00 w ON ю Јк О 00
и
Фиг.1
И
18
го
I LiZS
х
| Г М-СЗЕКг™-- N22
L-4X3Ek-/ 27
/
$
2525
к
30
ю
-з-S
шз
Фиг. it
Ю
Г
«
Г .
1 К
4 И
/
O Z9C8l
Фиг.7
ц
f
pEЈ
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1984 |
|
SU1194718A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
