фие.З
силового цилиндра 4. Кинематическая связь выполнена в виде кулисы 6, шарнирно соединенной со свободным концом рычага-захвата 5, и кривошипа 7, установленного на
раме 1 через неподвижную ось 8 и шарнирно связанного со свободным окном кулисы 6. 2 з.п, ф-лы, 3 ил.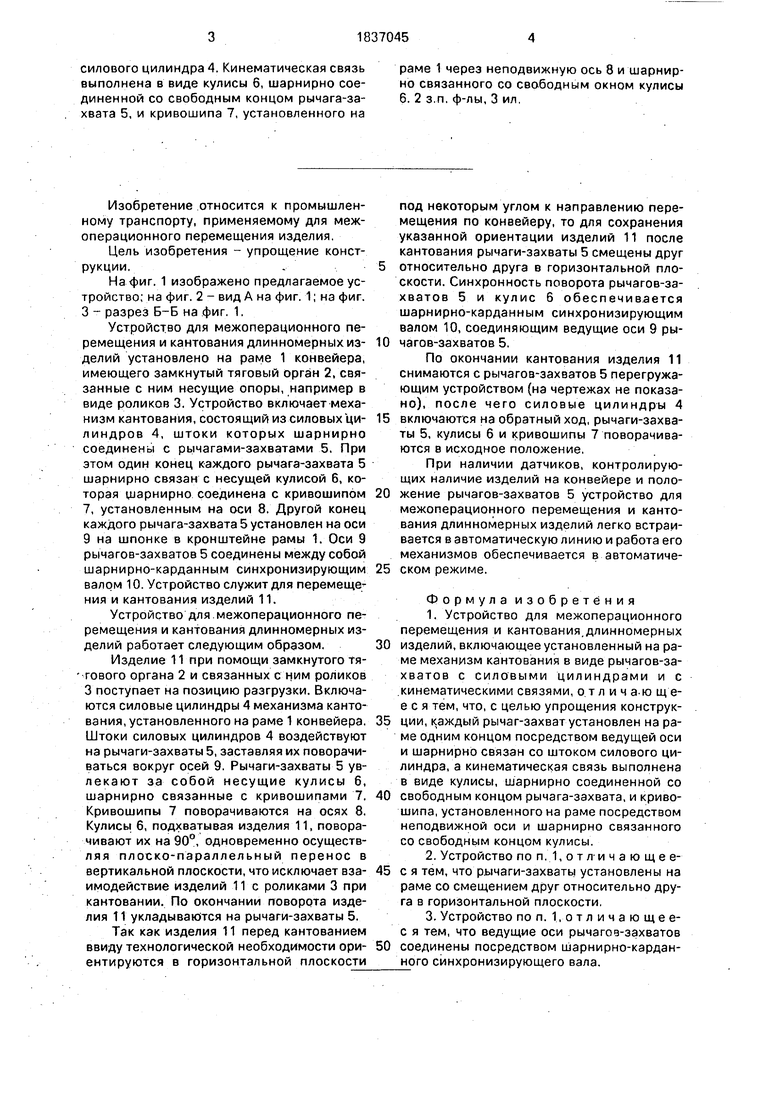
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| Устройство для перекладки длинномерных изделий с одного конвейера на другой | 1982 |
|
SU1082732A1 |
| Устройство для поштучной выдачи заготовок | 1983 |
|
SU1159852A1 |
| Транспортное средство для перевозки длинномерных пакетированных грузов | 1980 |
|
SU943030A1 |
| Группирователь рядов кирпича | 1981 |
|
SU1021626A1 |
| Перекладыватель заготовок к прессу | 1979 |
|
SU863427A1 |
| Устройство для передачи пачки длинномерных изделий от транспортного средства к питателю | 1989 |
|
SU1684198A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДЕТАЛЕЙ МЕЖДУ КОНВЕЙЕРАМИ, РАСПОЛОЖЕННЫМИ НА РАЗНОЙ ВЫСОТЕ | 1995 |
|
RU2101220C1 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
Использование: в промышленном транспорте для ориентации длинномерных изделий на технологической позиции. Устройство включает установленный на раме 1 механизм кантования в виде рычагов-захватов 5 с силовыми цилиндрами 4 и с кинематическими связями. Каждый рычаг-захват 5 установлен на раме 1 одним концом на ведущей оси 9 и шарнирно связан со штоком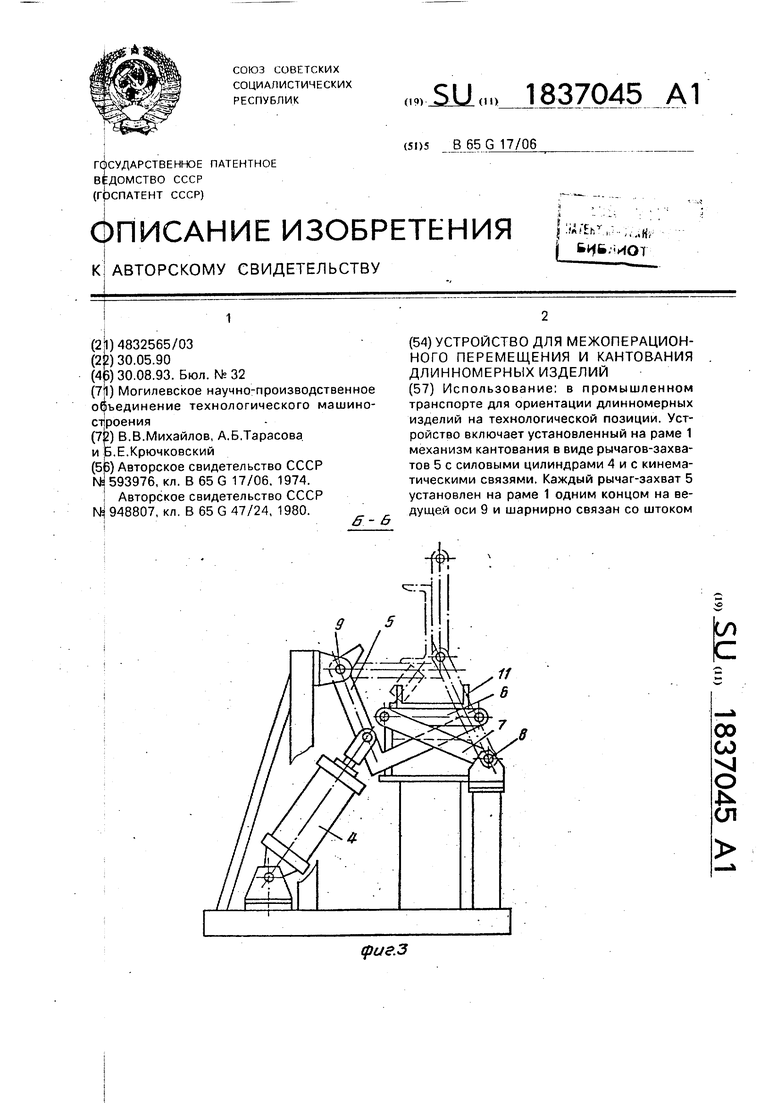
Изобретение относится к промышленному транспорту, применяемому для межоперационного перемещения изделия,
Цель изобретения - упрощение конструкции,.
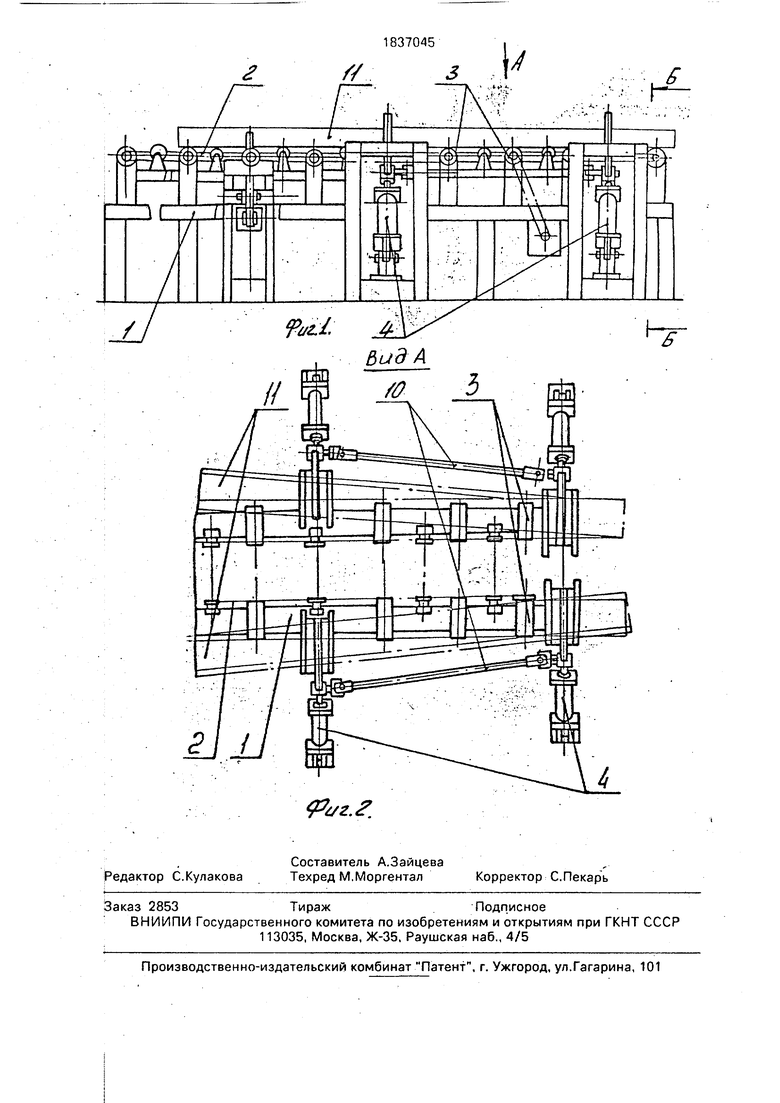
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Устройство для межоперационного перемещения и кантования длинномерных изделий установлено на раме 1 конвейера, имеющего замкнутый тяговый орган 2, связанные с ним несущие опоры, например в виде роликов 3. Устройство включает механизм кантования, состоящий из силовых цилиндров 4, штоки которых шарнирно соединены с рычагами-захватами 5. При этом один конец каждого рычага-захвата 5 шарнирно связан с несущей кулисой 6, которая шарнирно соединена с кривошипом 7, установленным на оси 8. Другой конец каждого рычага-захвата 5 установлен на оси 9 на шпонке в кронштейне рамы 1. Оси 9 рычагов-захватов 5 соединены между собой шарнирно-карданным синхронизирующим валом 10. Устройство служит для перемещения и кантования изделий 11.
Устройство для межоперационного перемещения и кантования длинномерных изделий работает следующим образом.
Изделие 11 при помощи замкнутого тя- гового органа 2 и связанных с ним роликов 3 поступает на позицию разгрузки. Включаются силовые цилиндры 4 механизма кантования, установленного на раме 1 конвейера. Штоки силовых цилиндров 4 воздействуют на рычаги-захваты 5, заставляя их поворачиваться вокруг осей 9. Рычаги-захваты 5 увлекают за собой несущие кулисы 6, шарнирно связанные с кривошипами 7. Кривошипы 7 поворачиваются на осях 8. Кулисы б, подхватывая изделия 11, поворачивают их на 90°, одновременно осуществляя плоско параллельный перенос в вертикальной плоскости, что исключает взаимодействие изделий 11 с роликами 3 при кантовании. По окончании поворота изделия 11 укладываются на рычаги-захваты 5.
Так как изделия 11 перед кантованием ввиду технологической необходимости ориентируются в горизонтальной плоскости
под некоторым углом к направлению перемещения по конвейеру, то для сохранения указанной ориентации изделий 11 после кантования рычаги-захваты 5 смещены друг
относительно друга в горизонтальной плоскости. Синхронность поворота рычагов-захватов 5 и кулис 6 обеспечивается шарнирно-карданным синхронизирующим валом 10, соединяющим ведущие оси 9 рычагов-захватов 5,
По окончании кантования изделия 11 снимаются с рычагов-захватов 5 перегружающим устройством (на чертежах не показано), после чего силовые цилиндры 4
включаются на обратный ход, рычаги-захваты 5, кулисы 6 и кривошипы 7 поворачиваются в исходное положение,
При наличии датчиков, контролирующих наличие изделий на конвейере и положение рычагов-захватов 5 устройство для межоперационного перемещения и кантования длинномерных изделий легко встраивается в автоматическую линию и работа его механизмов обеспечивается в автоматическом режиме.
Ф о р м у л а и з о б р е т ё н и я
изделий, включающее установленный на раме механизм кантования в виде рычагов-захватов с силовыми цилиндрами и с .кинематическими связями, о,т л и ч а-ю щ е- е с я тем, что, с целью упрощения конструкции, каждый рычаг-захват установлен на раме одним концом посредством ведущей оси и шарнирно связан со штоком силового цилиндра, а кинематическая связь выполнена в виде кулисы, шарнирно соединенной со
свободным концом рычага-захвата, и кривошипа, установленного на раме посредством неподвижной оси и шарнирно связанного со свободным концом кулисы.
раме со смещением друг относительно друга в горизонтальной плоскости,
соединены посредством шарнирно-кардан- ного синхронизирующего вала.
