Известны операционные роторы для наружной обточки детали фасонными резцами методом поперечной подачи.
Предложепный ротор отличается от известного тем, что рабочий орган резцовой головки выполнен в виде трехплечего рычага, включающего качающийся суппорт с инструментом и роликом техпологической подачи и механическую руку с клещевыми захватами.
Благодаря такому исполнепию рабочего органа отпадает необходимость в транспортном роторе и увеличивается время загрузки и ее надежность.
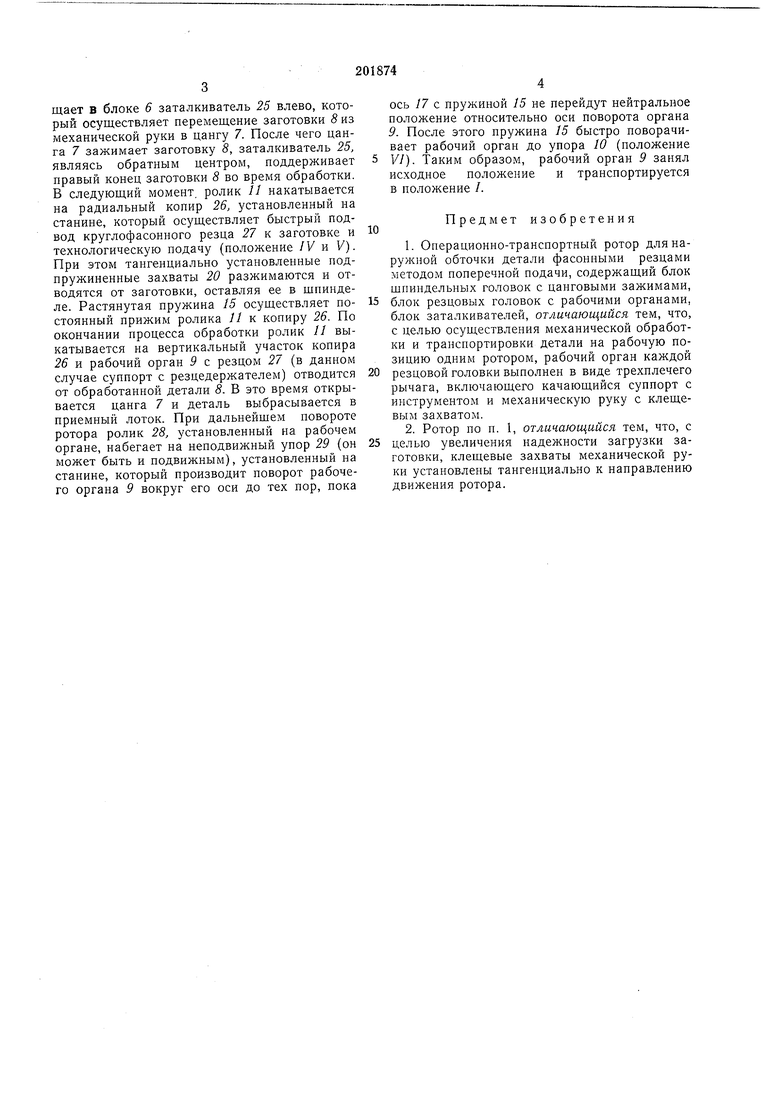
На фиг. 1 изображен роторный станок соперационно-транспортным ротором; на фиг. 2 - вид па рабочие органы ротора.
Операционно-транспортный ротор / базируется па 2-х роликах 2, вращающихся на подшипниках качения, и состоит из шести шпипделей .3 с шестернями 4 привода вращения плапшайбы 5 и блока 6 заталкивателей 6. Каждый шпиндель снабжен цапгой для зажима заготовки 8. На планшайбе 5 установлены на консольных осях шесть поворачивающихся рабочих органов 9, шесть упоров 10, в которые упирается роликом // рабочий орган при загрузке заготовок щибером 12 в механическую руку 13, шесть упоров 14, в которые рабочий орган 9 упирается при загрузке заготовок в шпиндель.
Работает операционно-транспортный ротор следующим образом- При вращении планшайбы 5 рабочий орган 9 в исходном положении 1 под действием пружины 15, закрепленной одним концом на стойке 16, а другим - на оси 17 рабочего органа, прижимается роликом 11, сидящим на оси 18, к упору 10 и в таком положении трапспортируется в положепие //. К этому времепи загрузочное устройство 19
осуществляет опережающую подачу заготовки па траекторию движения механической руки. Нижпий захват 20 механической руки своим плечом упирается в упор 21 и открывается для приема заготовки из загрузочного устройства 19. После приема заготовки захват 20 сходит с упора 21 и зажимает ее. При дальнейшем повороте ротора ролик 22, установленный на рабочем органе 9, упирается в упор 25, поворачивая рабочий органР до тех пор, пока
ось 17 с пружиной 15 не перейдет нейтральпое положепие относительно оси поворота рабочего органа. После чего пружина 15 быстро поворачивает рабочий орган до упора 14, установлепного на планшайбе 5 (положепие ///).
Таким образом, рабочий орган 9 (в данном случае - механическая рука рабочего органа) принял заготовку из загрузочного устройства и повернулся па 180° до совмещения оси заготовки с осью шпинделя. При дальнейшем
щает в блоке 6 заталкиватель 25 влево, который осуществляет перемещение заготовки 8 из механической руки в цангу 7. После чего цанга 7 зажимает заготовку 8, заталкиватель 25, являясь обратным центром, поддерживает правый конец заготовки 8 во время обработки. В следующий момент, ролик 11 накатывается на радиальный копир 26, установленный на станине, который осуществляет быстрый подвод круглофасонного резца 27 к заготовке и технологическую подачу (положение /Ун У). При этом тангенциально установленные подпружиненные захваты 20 разжимаются и отводятся от заготовки, оставляя ее в щпинделе. Растянутая пружина 15 осуществляет постоянный прижим ролика // к копиру 26. По окончании процесса обработки ролик // выкатывается на вертикальный участок копира 26 и рабочий орган 9 с резцом 27 (в данном случае суппорт с резцедержателем) отводится от обработанной детали 8. В это время открывается цанга 7 и деталь выбрасывается в приемный лоток. При дальнейщем повороте ротора ролик 28, установленный на рабочем органе, набегает на неподвижный упор 29 (он может быть и подвижным), установленный на станине, который производит поворот рабочего органа 9 вокруг его оси до тех пор, пока
ось 17 с пружиной 15 не перейдут нейтральное положение относительно оси поворота органа 9. После этого пружина 15 быстро поворачивает рабочий орган до упора 10 (положение VI). Таким образом, рабочий орган 9 занял исходное положение и транспортируется в положение /.
Предмет изобретения
1.Операционно-транспортный ротор для наружной обточки детали фасонными резцами методом поперечной подачи, содержащий блок шпиндельных головок с цанговыми зажимами,
блок резцовых головок с рабочими органами, блок заталкивателей, отличающийся тем, что, с целью осуществления механической обработки и транспортировки детали на рабочую позицию одним ротором, рабочий орган каждой
резцовой головки выполнен в виде трехплечего рычага, включающего качающийся суппорт с инструментом и механическую руку с клещевым захватом.
2.Ротор по п. 1, отличающийся тем, что, с целью увеличения надежности загрузки заготовки, клещевые захваты механической руки установлены тангенциально к направлению движения ротора.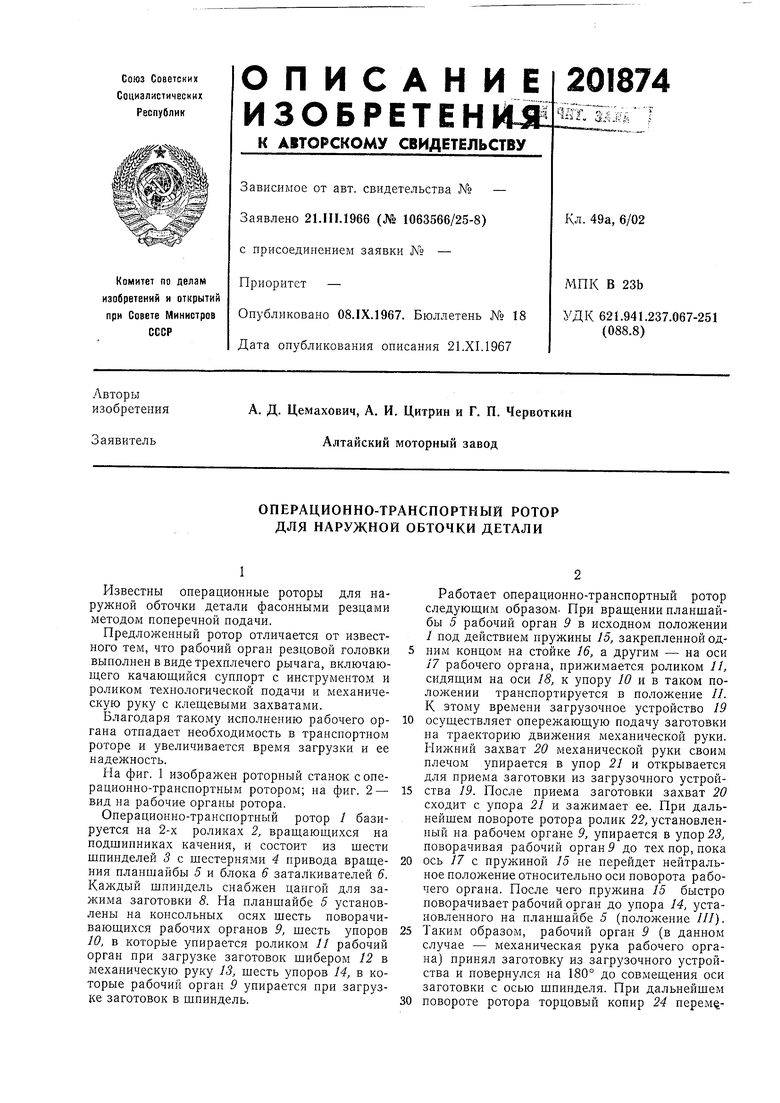
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий ротор | 1985 |
|
SU1306689A1 |
| Роторно-конвейерная линия | 1990 |
|
SU1735156A1 |
| РОТОРНО-КОНВЕЙЕРНАЯ ЛИНИЯ | 1992 |
|
RU2036771C1 |
| Роторная линия | 1989 |
|
SU1710302A1 |
| Копировальное приспособление к вертикальному станку для обточки ребер сырых фарфоровых изоляторов | 1960 |
|
SU132027A1 |
| Роторно-конвейерная линия | 1990 |
|
SU1722864A1 |
| Способ обработки штучных деталей, имеющих полость, на токарно-револьверном автомате | 2018 |
|
RU2685000C1 |
| Ротационно-обжимное устройство | 1977 |
|
SU742024A1 |
| Рабочий ротор | 1973 |
|
SU485856A1 |
| Роторная машина для гидравлической формовки сильфонов | 1981 |
|
SU1031563A1 |
27
/
