Известны устройства для передачи штучных грузов с одного конвейера на другой с одновременным поворотом их на 90°, выполненные в виде поворотной относительно горизонтальной оси рамы с силОВЫм пилиндрОМ и управляемым1и захватами для грузов.
Особенность предлагаемого устройства заключается в том, что захваты установлены на консольных балках ра.мы и каждый из них выполнен в виде двух скоб, связанных жестко со штокаМИ дополнительных СИЛовых цилиндров и перемещаемых по направляющим.
Такое конструктивное выполнение устройства повыщает эффективность его работы.
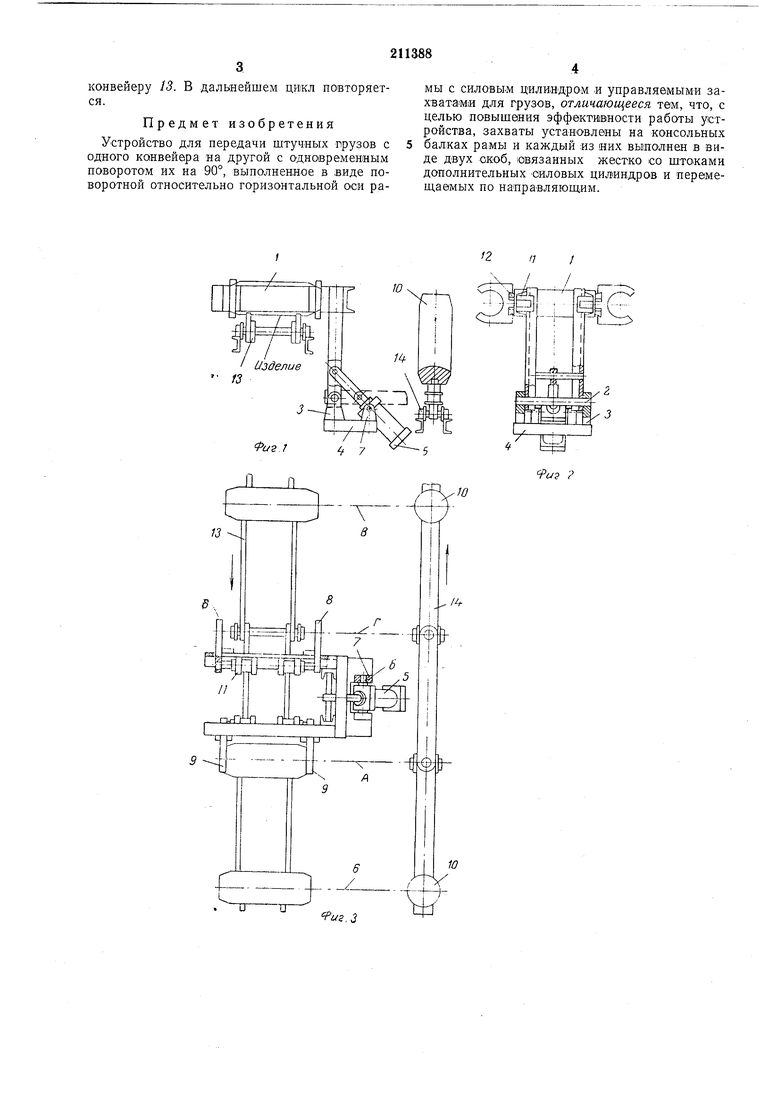
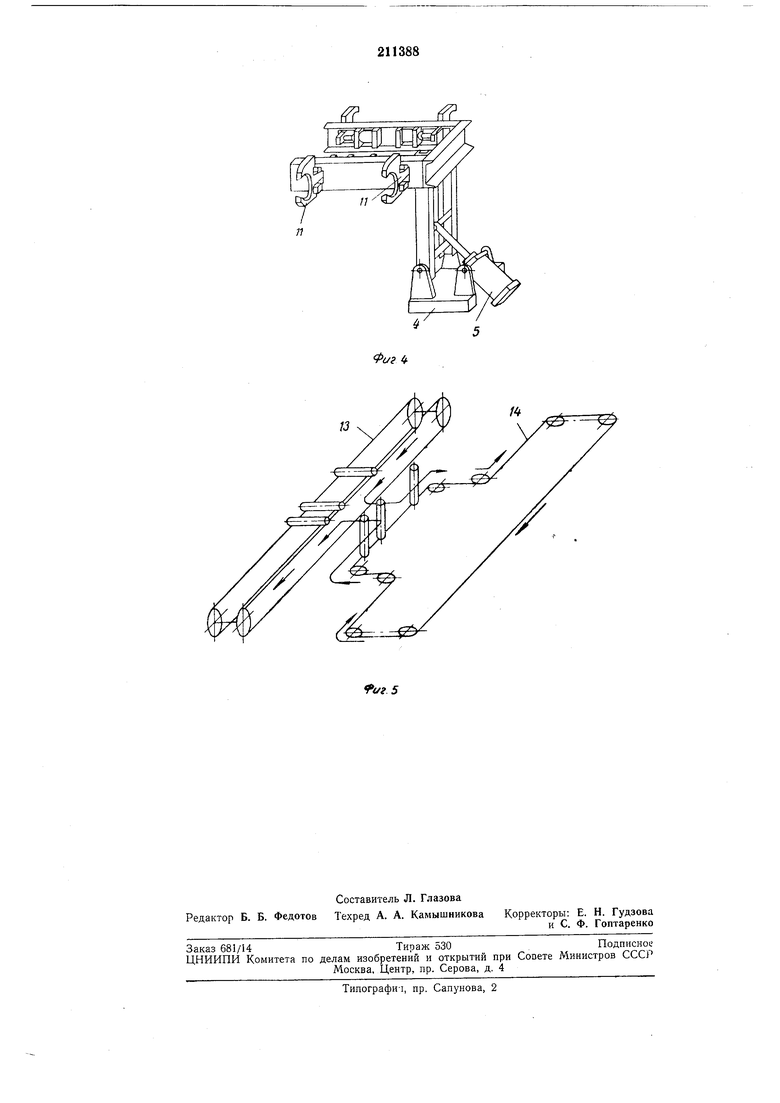
На фиг. 1 схематически изображено предлагаемое устройство, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - то же, общий вид в аксонометрии; на фиг. 5 - .схема двилсения изделий С одного конвейера на другой.
Пространственная рама / имеет цапфы 2, которые вращаются в подщипниках 3, смонтированных на станине 4. Поворот рамы осуществляется от силового цилиндра 5, цапфы 5 которого вращаются в подшипниках 7, также закрепленных на станине. На раме установлены два управляемых захвата 8 и 9 для грузов 10. Каждый захват состоит из двух скоб, связанных со штОкамп дополнительных силовых цилиндров 11 и перемещающихся по направляющим 12. Вертикально-замкнутый конвейер 13 расположен параллельно горизонтально-замкнутому конвейеру 14.
Работает устройство следующим образо М.
В исходном положении рама / с захватами находится у вертикально-замкнутого конвейера 13, захват 9 зажимает груз 10, штоки дополнительных силовых цилиндров захвата 9 втянуты. При этом захват 9 раскрыт, штоки его силовых цилиндров выдвинуты. Оба конвейера находятся в исходном положении. Далее, захват 9 раскрывается, и груз 10 остается на конвейере 13. Последний включается, и груз с позиции А перемещается на позицию Б, а груз с позиции В перемещается на позицию Г, т. ,е. оказывается между скобами захвата 5. После остановки конвейера 13 захват 8 зажимает груз. Затем силовой цилиндр 5 поворачивает раму / с захватами вокруг горизонтальной оси на 90°, и груз, зажатый захватом 8, оказывается на позиции горизонтально-зам:кнутого конвейера 14. Захват 8 разжимается, и груз остается на конвейере 14. После этого включается конвейер 14, и груз с позиции Г перемещается на позицию В, а груз с позиции Б передвигается на позицию А, т. е. оказывается между скобами захвата 9. После остановки конвейера 14 захват 9 зажимает груз, затем силовой цилиндр 5 поворачивает раму / на 90° вокруг горизонтальной оси к
конвейеру 13. В далвнейшем цикл повторяется.
Предмет изобретения
Устройство для передачи штучных грузов с одного конвейера на другой с одновременным поворотом их на 90°, выполненное в виде поворотной относительно горизонтальной оси рамы с силовы.м цилиндром и управляемыми захватами для грузов, отличающееся тем, что, с целью повышения эффекти1В НОсти работы устройства, захваты установлены на консольных балках рамы и каждый из них выполнен в виде двух окоб, связанных жестко со штоками дополнительных Оиловых цилиндров и перемеш,аемых по направляюш им.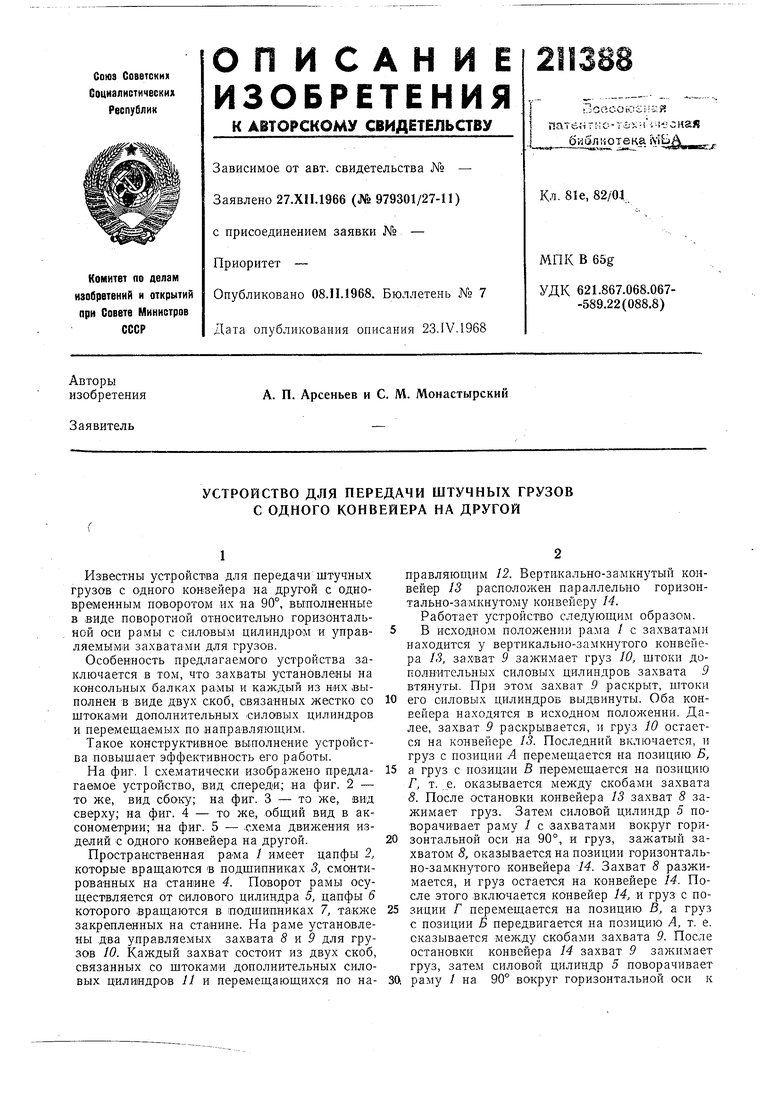
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи штучных грузов | 1988 |
|
SU1518253A1 |
| Устройство для разгрузки штучных грузов | 1960 |
|
SU140735A1 |
| Устройство для захвата слоя штучных изделий | 1986 |
|
SU1382803A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1761648A2 |
| Агрегатный станок | 1985 |
|
SU1283050A1 |
| Устройство для разгрузки вагонов | 1985 |
|
SU1346548A1 |
| Транспортное средство для перевозки штучных грузов | 1977 |
|
SU695867A1 |
| Устройство для передачи штучных грузов | 1981 |
|
SU971745A1 |
| Захват для сыпучих грузов к погрузчику | 1988 |
|
SU1596655A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |
2 п 1
. / /
9V
10
