Известны грузозахватные приспособления для подвесных конвейеров, содержащие корпус с ползуном, автоматическую четырехтактную защелку и грузозахватные органы, укрепленные на штоке.
Особенность предлагаемого грузозахватного приспособления состоит в том, что корпус и ползун выполнены с копирными пазами, которые взаимодействуют с подвижным пальцем, программно фиксирующим взаимное положение корпуса с ползуном, имеющим расходящиеся под определенным углом пазы в виде двустороннего клина. Последний взаимодействует с осями противоположно перемещаемых (горизонтально расположенных штоков, выполненных для установки сменных грузозахватных органов в зависимости от габаритных размеров и рода груза.
Это повышает надежность приспособления и обеспечивает универсальность в работе.
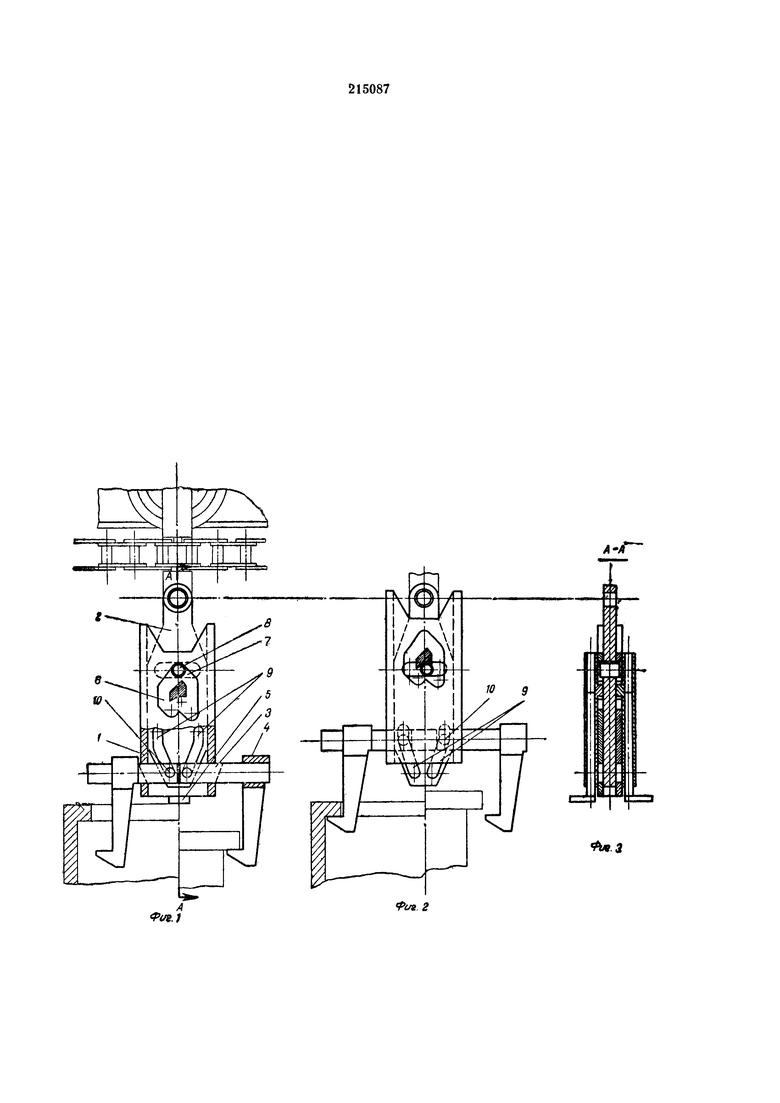
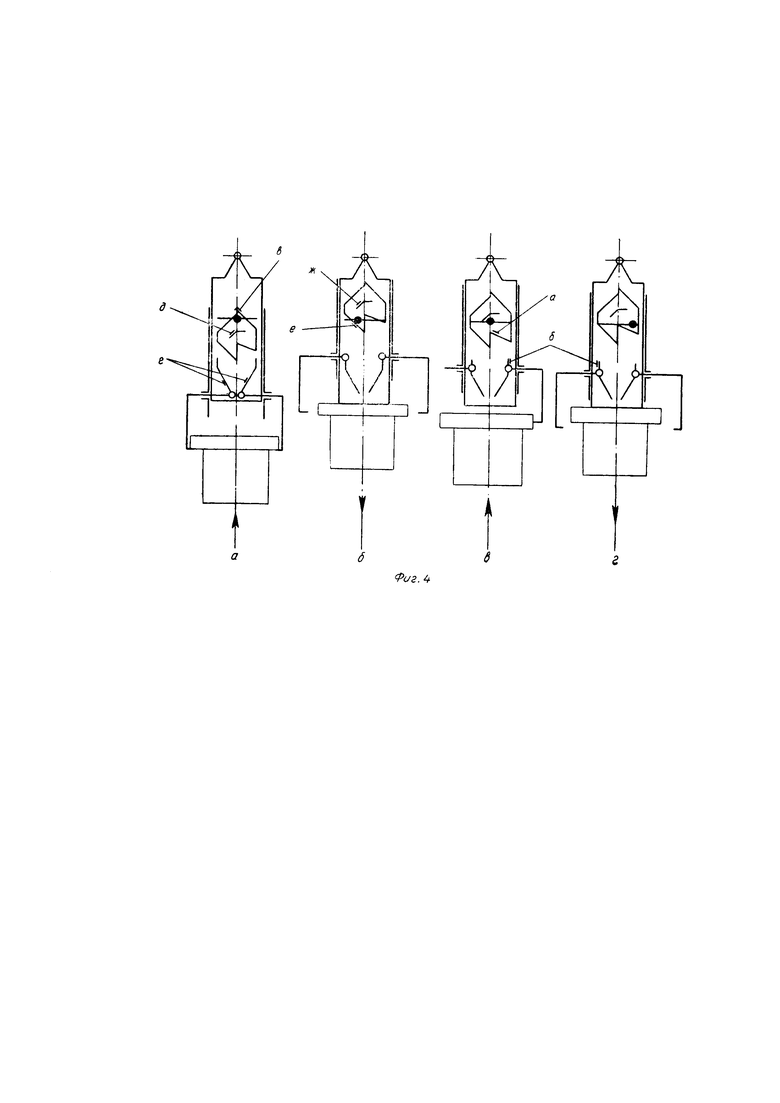
На фиг. 1 изображено приспособление с грузом, взятым за наружные поверхности, и с освобожденным грузом, захватываемым за внутренние поверхности; на фиг. 2 - то же, с грузом, взятым за внутренние поверхности, и с освобожденным грузом, захватываемым за наружные поверхности; на фиг. 3 - разрез по А-А на фиг. 1; на фиг. 4 (а, б, в, г) - схема работы приспособления.
Приспособление состоит из корпуса 1, ползуна 2, горизонтальных штоков 3, сменных переналаживаемых грузозахватных органов 4 и регулируемых упоров 5. Корпус выполнен с копирными пазами 6, а ползун - с прямолинейным пазом 7. С пазами 6 и 7 подвижно-фиксирующе взаимодействует палец 8, обеспечивая фиксированное положение корпуса относительно ползуна. В нижней части ползуна выполнены расходящиеся под определенным углом пазы 9, образующие двусторонний клин, воздействующий на оси 10 штоков.
На свободные концы штоков насажены сменные переналаживаемые захватные элементы, от формы и положения которых зависит взятие грузов определенной формы и размеров.
Работа грузозахватного приспособления заключается в следующем.
Приспособление соединяют с тяговым органом или грузовой кареткой подвесного конвейера при помощи соединительного отверстия в верхней части ползуна. Перед загрузкой положение корпуса относительно ползуна обеспечивает свободный ввод груза между захватными элементами (фиг. 4, в). Для навески груза на конвейер последний с помощью подъемника вводят в соприкосновение с упорами приспособления. При дальнейшем движении подъемника с грузом корпус поднимается, скос а копирных пазов находит на палец и оттесняет его вправо до упора (фиг. 4, г). Одновременно оси штоков перемещаются в параллельных частях б двустороннего клина (штоки остаются на месте). Подъемник изменяет направление движения, опускаясь вместе с грузом. Корпус также опускается до соприкосновения с радиусной частью в пазов. В это же время поверхности г клина сводят вместе штоки, а вместе с ними и грузозахватные органы. Подъемник уходит вниз, а груз оказывается в захвате (фиг. 4, а).
При разгрузке подъемник нажимает на груз, который в свою очередь поднимает корпус, скос ∂ копирных пазов оттесняет палец влево, в дальнейшем скос е переводит его вправо. Одновременно оси штоков, обкатываясь по поверхности г клина до его частей б, разводят в стороны штоки с грузозахватными органами (фиг. 4, б).
Затем подъемник опускается, неся на себе снятый груз, корпус приспускается, скос ж оттесняет палец вправо до исходного положения. Одновременно оси штоков перемещаются в частях б также до исходного положения, оставляя разведенными захваты. Цикл закончен.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Склад для хранения штучных грузов | 1984 |
|
SU1211174A1 |
| Транспортная установка для передачи изделий с одного конвейера на другой | 1981 |
|
SU1006345A1 |
| Трелевочная каретка подвесной канатной дороги | 1987 |
|
SU1418130A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| АВТОМАТ ДЛЯ ГИБКИ ЛИСТОВЫХ ЗАГОТОВОК | 1970 |
|
SU263554A1 |
| Устройство для межоперационного траспортирования грузов | 1977 |
|
SU701898A1 |
| Грузозахватное устройство | 1977 |
|
SU727551A1 |
| Механизм фиксации грузозахватного устройства | 1982 |
|
SU1074804A1 |
Грузозахватное приспособление для подвесных конвейеров, содержащее корпус с ползуном, автоматическую четырехтактную защелку, грузозахватные органы, укрепленные на штоке, отличающееся тем, что, с целью повышения надежности и обеспечения универсальности в работе, корпус и ползун выполнены с копирными пазами, взаимодействующими с подвижным пальцем, программно фиксирующим взаимное положение корпуса с ползуном, снабженным расходящимися под определенным углом пазами в виде двустороннего клина, взаимодействующего с осями противоположно перемещаемых горизонтально расположенных штоков, выполненных для установки сменных грузозахватных органов в зависимости от габаритных размеров и рода груза.
