Известны устройства для управления перемещениями крана-штабелера, состоящие из переключателя управления с рукояткой для четырех направлений движения, установленного в кабине поворотной колонны, магнитных пускателей, установленных в шкафу электрооборудования, конечных выключателей ограничения перемещений крайних положений тележки и моста крана. Особенность предложенного устройства заключается в том, что на тележке размещены путевые переключатели, коммутируемые при вращении поворотной колонны укрепленным на ней кулачком. Путевые переключатели включены в цепи соответствующих реле коммутатора, выбирающих через переключатель управления заданное направление движения.
Такое выполнение устройства позволяет повысить точность и надежность управления.
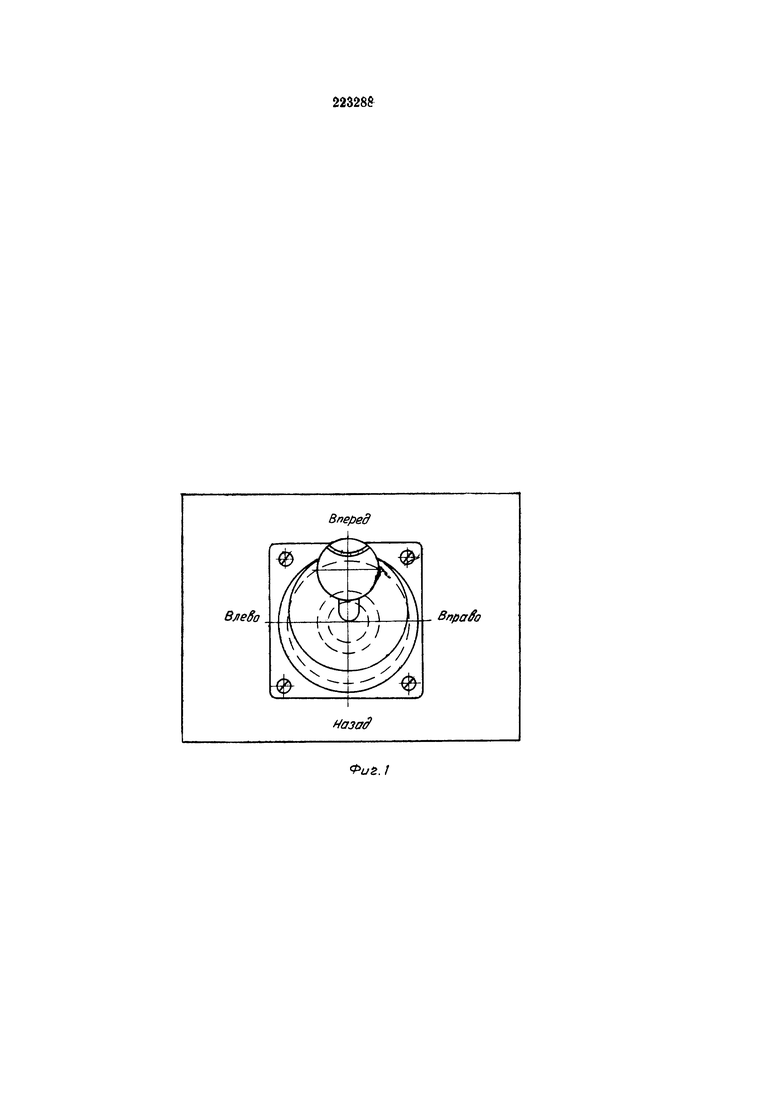
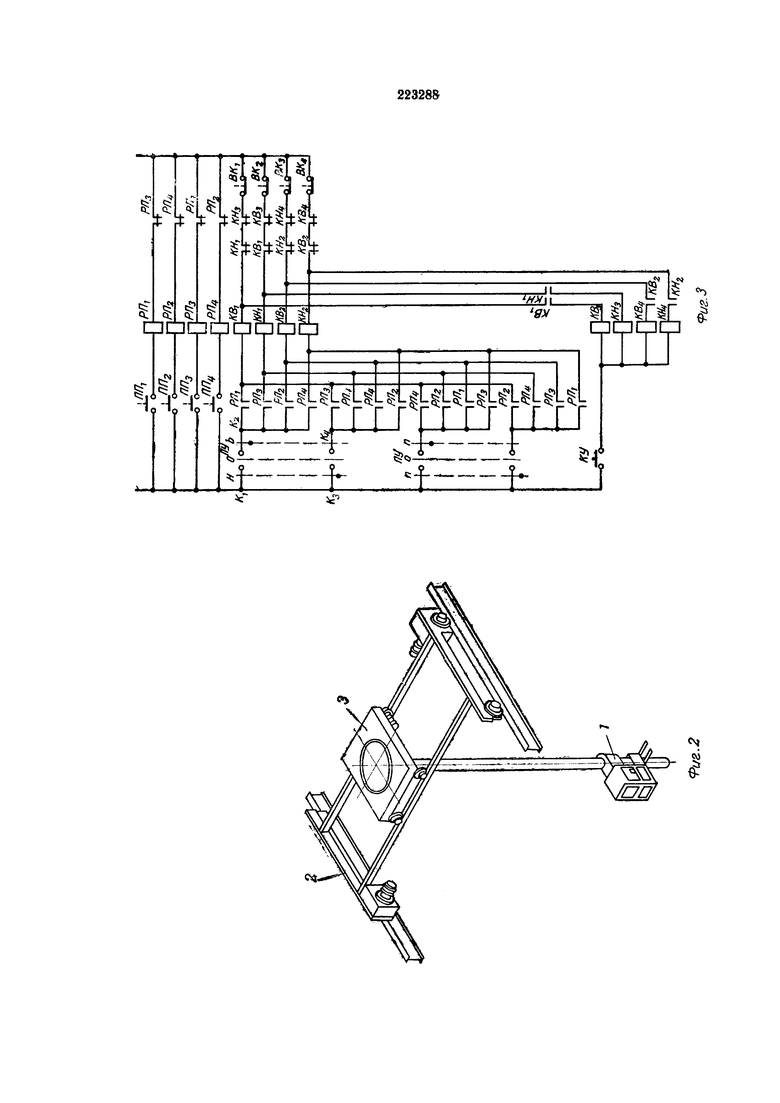
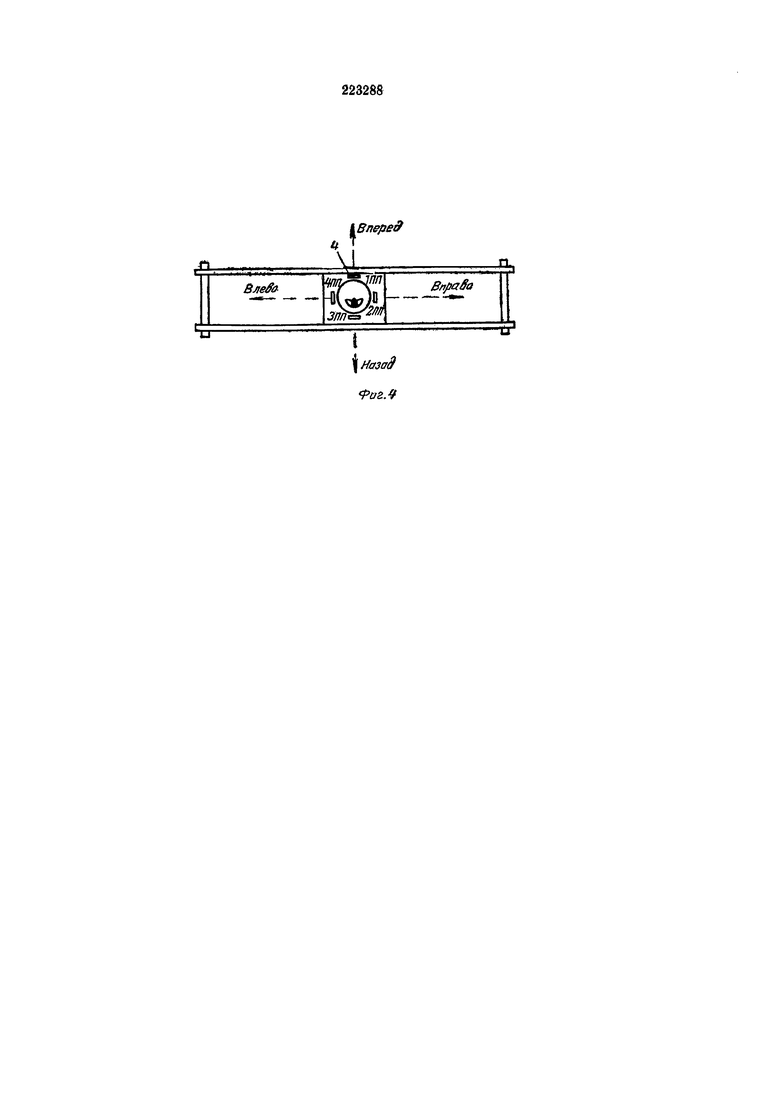
На фиг. 1 схематически изображен переключатель управления; на фиг. 2 - кран-штабелер, общий вид; на фиг. 3 - принципиальная электрическая схема устройства; на фиг. 4 - схема размещения путевых переключателей ПП и кулачка на тележке крана-штабелера.
Переключатель управления крана-штабелера (см. фиг. 2) расположен на пульте управления в кабине 1 и предназначен для установки четырех направлений движения моста 2 тележки 3.
Предложенное устройство для управления перемещениями крана-штабелера работает следующим образом.
При повороте кабины относительно моста она фиксируется в четырех положениях путевыми переключателями ПП1-ПП4, кулачком 4 (см. фиг. 4).
В исходном положении кабины нажат путевой переключатель ПП1 и включено реле РП1.
При положении рукоятки переключателя управления ПУ «вправо» замыкается контакт K1K2 этого переключателя, создается цепь питания магнитного пускателя электродвигателя KВ1 и мост перемещается вправо.
При положении рукоятки переключателя управления ПУ «влево» замыкается его контакт K3K4, создается цепь питания магнитного пускателя электродвигателя KH1 и мост перемещается влево.
Перемещение тележки управляется аналогично при создании цепей питания магнитных пускателей электродвигателей KВ2 и KH4.
При повороте кабины на 90° замыкается контакт путевого переключателя ПП2 и включается соответственно реле РП2. Включение реле РП1-РП4 при соответствующем положении кабины осуществляет коммутацию переключателя управления таким образом, что в любом положении кабины направление включения переключателя управления совпадает с направлением движения крана штабелера.
При отсутствии коммутации после поворота кабины на 90° по часовой стрелке и положении рукоятки переключателя управления «вперед» мост переместился бы влево, а тележка не сдвинулась по направлению «вперед».
Кнопка KУ и магнитные пускатели KB3, KН3, KB4, KH4 обеспечивают включение второй скорости движения, а конечные выключатели BK1-BK4 являются ограничителями перемещений моста и тележки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система рулевого управления транспортного средства | 1983 |
|
SU1158430A1 |
| Устройство доения коров | 1988 |
|
SU1613067A1 |
| Механизм перемещения плит и рам фильтр-пресса | 1978 |
|
SU749401A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Поворотный кормораспределитель | 1983 |
|
SU1126258A1 |
| Тележка крана-штабелера | 1975 |
|
SU523545A1 |
| МОСТОВОЙ КРАН-ШТАБЕЛЕР | 1997 |
|
RU2191150C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СБРАСЫВАЮЩЕЙ ТЕЛЕЖКОЙ ТРАНСПОРТЕРА | 1970 |
|
SU261252A1 |
| Устройство управления электроприводом тележки многоопорной дождевальной машины | 1991 |
|
SU1792264A3 |
| Устройство для уборки кирпича от пресса | 1939 |
|
SU58585A1 |
Устройство для управления перемещениями крана-штабелера, содержащее переключатель управления с рукояткой для четырех направлений движения, установленный в кабине поворотной колонны, магнитные пускатели, конечные выключатели ограничения перемещений крайних положений тележки и моста крана, отличающееся тем, что, с целью повышения точности и надежности управления, на тележке размещены путевые переключатели, коммутируемые при вращении поворотной колонны укрепленным на ней кулачком, причем путевые переключатели включены в цепи соответствующих реле коммутатора, выбирающих через переключатель управления заданное направление движения.
